

01-01-1970_03-00-00 (5) / Теория электрической связи. Конспект лекций. ЛИТМО.2012
.pdf120
y(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
ПРМ |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
u(t, *з, f*, *) |
i |
|
||||||||
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Дискри- |
|
|
|
|
Устройство |
|
||
|
|
Ген |
|
|
|
|
|
||||||
|
|
|
минатор |
|
|
|
|
поиска |
|
||||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 18.2. Состав приёмного устройства
Если значения параметров сигнала отличаются от опорного сигнала на= *– u; з = *– н; f = f *–fн, то выходное отношение сигнал/шум уменьшается в соответствии с корреляционной функцией:
h2 |
h2 cos |
sin2 fT |
|
з |
|
|
|
1 |
|
|
|||
|
|
|
||||
0неид. |
0 |
2 fT |
|
T |
||
|
|
|||||
– неидеальное отношение сигнал/шум.
Ошибка измерения
T
z (n(t) S(t, 0 ))S(t, )dt rS rn ;
0
M(z) = rS; D(z) = N0ES; f ( ) z 0 rS rn . |
||
|
|
|
18.6 Дискриминаторы оценки параметров сигналов
а) Дискриминатор по задержке (рис. 18.3) – это устройство, на выходе которого действует напряжение U, пропорциональное разности параметров входного и опорного сигналов
|
|
U |
= KUg. |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
z1(t) |
|
||||
– р |
|
р |
|
y(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
S(t + T / 2 |
|
|
|
|
|
|
||||
|
|
|
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
рабочее |
|
|
|
|
|
|
|
|
z2(t) |
|
||||||
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
окно |
|
|
|
|
S(t – T / 2 |
|
|
|
|
|
|
|
||||
Рис. 18.3. Структурная схема дискриминатора по задержке
Если использовать корреляционные функции сдвинутые на Т/2 вправо и влево, то получим (рис. 18.4):
r |
|
A2 |
T |
|
|
|
; r |
A2 |
T |
|
|
|
; |
||
|
|
|
|
|
|
|
|
|
|
||||||
T |
2 |
|
T |
2 |
|
||||||||||
1 |
|
|
|
з |
|
2 |
|
|
з |
|
|
||||
Ug = r1–r2 = –k з; k = 2/T; A2 = 1.
Вклад шума приводит к неопределенности значения параметра:
121
|
|
|
|
T |
|
|
|
|
|
|
|
2 |
|
N0 |
|
|
|
|
|
|
r |
|
2 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
n(t)U |
0n |
(t)dt, |
|
|
E |
c |
, |
|
|
~ h2 |
. |
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
ш |
2 |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|||||||||||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ш |
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
US10n |
|
|
|
|
|
|
з |
T з |
|
|
|
r2 |
T |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
|
|
–T/2 |
|
|
|
|
T/2 |
|
|
|
|
T |
||||||||||
|
* |
|
|
0 Т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
y(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U0п(t+KT) |
|
|
– |
|
|
|
|
|
|
|
US20n |
|
|
|
|
|
|
|
|
|
|
–T |
T |
2T |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
* |
|
|
0 Т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T/2 T+T/2 |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
U0п(t–KT) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
зона захвата |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Рис. 18.4. Построение дискриминационной характеристики
б) Фазовый дискриминатор (рис. 18.5) строится на основе выражения для дискриминационной характеристики:
Ug = f( ),
1 T
r1 T 0cos( t )cos tdt cos .
|
|
|
|
|
z1(t) |
|
||||
sin( t + ) |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
||||
sin t |
|
|
|
|
|
|
|
|||



z2(t)
cos t
Рис. 18.5. Структурная схема фазового дискриминатора
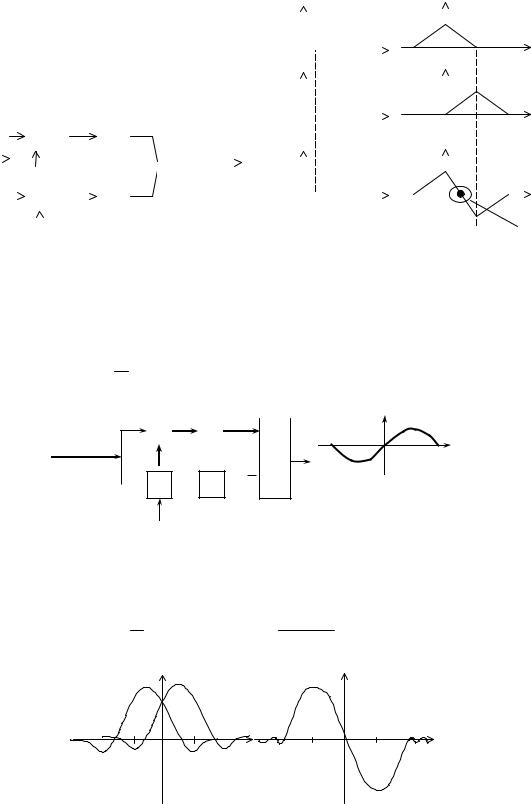
в) Частотный дискриминатор основан на использовании функции корреляции по частоте (рис. 18.6):
r |
1T |
j t |
e |
j( )t |
dt |
sin t |
|
T |
e |
|
|
t |
|||
|
0 |
|
|
|
|
||
|
|
|
|
|
|
|
t |
r1 |
|
|
|
|
r2 |
|
r = Ug |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
fн– F/2 |
fн+ F/2 |
|
|
||||
|
|
|
fн |
|
|
|
|
Рис. 18.6. Зависимости функции корреляции по частоте

122
Дискриминационная характеристика для частотного дискриминатора
Схема приёмного устройства (рис. 18.7) содержит устройства поиска и синхронизации по параметрам в виде корреляторов.
y(t) |
|
0 Т |
СхСр |
1 |
* |
|
|||
uS1(t, з, , t) |
|
|
||
* |
|
0 Т |
|
0 |
US2 |
|
|
|
|
Ген ОП |
f |
f ~ ppm = –6fн |
|
|
з |
|
|
|
|
u(t–T/2) |
|
|
r1+ |
|
* |
|
Т |
|
|
|
|
|
||
|
0 |
|
||
* |
|
0 Т |
r2– |
|
|
|
|
||
 u(t+T/2)
u(t+T/2)
Рис. 18.7. Схема приемника с устройством синхронизации

123
Лекция 19 РАЗНЕСЕНИЕ ПРИЁМА И ПЕРЕДАЧИ
Большинство каналов систем радиодоступа являются многолучёвыми, из-за чего на приёме присутствует несколько задержанных копий полезного сигнала с различными задержками и амплитудами (рис. 19.1). Это приводит к изменению амплитуды суммарного сигнала на входе приёмника uS (t).
h12(t) |
uS1(t) |
|
канал |
|
|
1 |
t |
|
0 |
||
uS2(t) |
||
h2(t) |
|
|
2 |
|
|
канал |
|
|
2 |
t |
|
0 |
||
uS = max{uS1, uS2} |
||
h2(t) |
|
|
|
|
|
канал |
|
|
1 |
t |
|
0 |
||
|
||
Рис. 19.1. Принцип разнесённого приёма |
||
При применении методов разнесения для повышения помехозащищённости в условиях замираний, структурная схема приёмника содержит две и более антенн, разнесённых по пространству на более чем R = (10...30) , что обеспечивает независимость замираний сигнала в разных ветвях приёма
(рис. 19.2).
|
1 |
|
|
ПРД |
Схема |
ПРМ |
|
объединения |
|||
|
|
||
|
Na |
|
Рис. 19.2. Структура системы с пространственным разнесением
Для каналов с рэлеевским законом распределения амплитуды замираний функция плотности распределения вероятностей для отношения hс2/ш является экспоненциальной
|
2 |
|
1 |
|
h2 |
|
2 |
|
||
|
|
|
h |
|
||||||
p(h |
|
) |
|
|
|
e |
с/ш |
с/ш , |
(19.1) |
|
|
|
|
|
|||||||
с/ш |
|
|
h |
2 |
|
|
|
|
|
|
|
|
|
|
с/ш |
|
|
|
|
|
|
где hс2/ш – среднее значение отношения сигнал/шум.

124
Схема объединения сигналов с разных ветвей разнесения может выполняться тремя способами: оптимальное сложение, сложение с равными весами и автовыбор канала с максимальным значением hс2/ш .
Вероятность ошибки на бит при корреляционном приёме и с использованием схемы оптимального сложения определяется выражением
|
|
2Na |
|
|
|
|
|
|
Na |
|
|
|
|
|
1 |
Na |
|
|
|
|
|||||
|
|
|
|
|
||||||||
P |
|
|
|
|
|
|
|
|
|
, |
(19.2) |
|
ош |
|
N |
|
4h |
|
2 |
|
|
|
|||
|
|
|
|
a |
|
|
N |
a |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||
где Na – число каналов разнесения (рис. 19.2). На рис. 19.3 приведены графики зависимостей вероятности ошибки на бит от отношения h02 при различных значений Na. Для ориентировки на рис. 19.3 приведены график для канала с замираниями без разнесения (кривая 1) и график вероятности ошибки для канала без замираний (кривая 6).
|
рош |
|
|
|
|
|
|
10–1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
10–2 |
|
|
|
2 |
|
|
|
|
|
|
3 |
|
|
||
|
|
|
|
|
|
|
|
10–3 |
|
|
5 |
4 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
10 lgh02 |
|
|
10 |
–4 |
|
6 |
|
|
, дБ |
|
–10 |
0 |
10 |
20 |
30 |
|
|
|
|
|
|
|||||
|
Рис. 19.3. Зависимость hвых2 |
от Na |
|
||||
Анализ приведённых графиков позволяет сделать вывод о том, что каждый дополнительный канал разнесения приводит к увеличению энергетического выигрыша (до 5 дБ) и, соответственно, к снижению вероятности ошибки при равном значении отношения сигнал/шум.
При оптимальном сложении выходной сигнал формируется из Na входных суммированием с оптимальными весовыми коэффициентами W, значения которых пропорциональны амплитуде принимаемого в i-м канале полезного сигнала
y |
|
Na |
|
(t). |
(19.3) |
выхopt |
(t) W y |
i вх |
|||
|
i |
|
|
i 1
При сложении с равными весами выходной сигнал равен
|
Na |
|
yвых |
(t) yi вх (t). |
(19.4) |
|
i 1 |
|
При автовыборе входного сигнала с наибольшей амплитудой полезного сигнала справедливо

125
yвых |
max |
(t) max{yi вх (t)}. |
(19.5) |
|
i |
|
Вероятность ошибки для способов объединения (19.4) и (19.5) превышает вероятность ошибки для способа объединения (19.3). Проигрыш в энергетике составляет от 2 до 10 дБ (при большом количестве ветвей Na).
Антенны, используемые в системах радиодоступа для дополнительных каналов приёма, подключаются к одному из антенных входов АС или БС. Техника использования антенны проста. Необходимо, чтобы расстояние между АС и дополнительной антенной превышало 10...30 длин волн радиовол-
ны (рис. 19.4).
Ант
R = (10...30)
АС 
Рис. 19.4. Схема расположения дополнительной антенны
Применение разнесения на приёмной стороне решает задачу произвольного расположения АС в пределах зоны обслуживания. Выигрыш от разнесения лучше всего иллюстрирует пример приёма в условиях замираний при отношении сигнал/шум h02 = 20 дБ. При приёме без разнесения
|
|
|
|
1 |
0,25 10 2 , |
|
P |
||||||
|
|
400 |
||||
|
ош1 |
|
|
|||
при приёме с двумя ветвями разнесения
|
|
|
|
3 |
|
4 |
0,75 10 4, |
|
P |
||||||||
|
|
|
|
|||||
|
ош2 |
16 (102 )2 |
|
|||||
и с тремя ветвями
Pош3 10 212 3 4 10 5 . 64 (10 )
Дальнейшее развитие методов разнесения связано с разнесением передатчиков и приёмников. В системах радиодоступа применяют разнесение передатчиков по задержке (рис. 19.5), ортогональное разнесение передатчиков (рис. 19.6) и пространственно-временное разнесение (рис. 19.7).
 uS1(t)
uS1(t)
d(t) |
Свёрточ- |
|
S(t) |
|
|
ный кодер |
|
|
|
|
|
|
|
|
|
|
|
|
|

 uS2(t)
uS2(t)
Рис. 19.5. Схема разнесения передатчиков по задержке БС

126
 uS1(t)
uS1(t)
|
d(t) |
Свёрточ- |
|
d(i) |
Демуль- |
|
|
|
S(t) |
|
||
|
|
|
|
|
1(t) |
|||||||
|
|
|
||||||||||
|
|
|||||||||||
|
|
ный кодер |
|
типлексор |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|||||
 uS2(t)
uS2(t)
2(t)
Рис. 19.6. Схема ортогонального разнесения передатчиков
|
|
|
|
uS1(t) |
d(t) Свёрточ- d(i) |
Демуль- |
W(t) |
1(t) |
|
ный кодер |
типлексор |
|
|
|
Преобразователь |
|
|
|
uS2(t) |
d0 |
d1 |
|
|
|
ортогонального |
|
|
||
d1* |
d0* |
W(t) |
|
|
разнесения |
2(t) |
|||
Рис. 19.7. Схема пространственно-временного разнесения
Дополняют перечисленные методы разнесённого приёма приёмники с разнесением по времени (в англоязычной литературе RAKE-приёмники). Идея заключается в сложении всех задержанных, пришедших по разным лучам копий полезного сигнала на приёмной стороне (рис. 19.8).
|
|
|
t0 |
1 |
|
2 |
1 |
|
|
||
0 |
з |
з |
з |
|
|
|
|
ПРД |
|
|
|
2 |
|
|
|
VL+1 |
VL |
VL–1 |
V0 |
|
СФ |
Рис. 19.8. Принцип действия RAKE-приёмника
Сигнал на выходе линии задержки с элементарными задержками
1
з Fc ,
где Fc – полоса частот, занимаемая сигналом, представляет собой сумму
K L |
uSl (t l |
i з) n(t) , |
(19.6) |
uлз(t) vi |
l 1i 0
127
где uSl (t l i з ) – сигнал, пришедший из l-го луча и задержанный на интер-
вал t = i з. Весовые коэффициенты vi подбираются в соответствии с алгоритмом адаптации так, чтобы задержанные копии сигналов разных лучей суммировались в фазе
u |
лз |
(t) v |
u |
S |
(t T |
p1 |
) v u |
(t T |
p2 |
i |
з |
) v |
u |
(t T |
p3 |
i |
) n*(t), (19.7) |
|
0 |
|
|
i |
Si |
|
j |
|
Sj |
з |
|
а остальные весовые коэффициенты оказываются равными нулю. Значения задержке в (19.7) устанавливаются так, чтобы выполнялось Tp2–i з Tp1 и Tp3– j з Tp1, тогда задержки всех сигналов выравниваются.
Эффективность применения RAKE-приёмников характеризуется энергетическим выигрышем при равной вероятности ошибки для рэлеевского канала
|
|
|
|
|
|
|
|
|
|
|
|
2L 1 |
L |
1 |
|
|
|
|
|
|
|
|
|
|
P |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
, |
||||
|
|
|
|
|
|
|
|
L |
|
|||||||
|
|
|
|
|
|
|
|
|
ошRAKE |
|
k 1 |
2h2( ) |
||||
|
|
|
|
ES |
|
|
|
|
|
|
|
|
|
|
k |
|
где h2 |
h2v*v |
|
|
|v |
|
|2 |
|
– отношение сигнал/шум для k-го луча; – коэф- |
||||||||
|
N0 |
|
|
|||||||||||||
k |
0 k |
k |
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
фициент корреляции сигналов, используемых для передачи информации. При примерно равных отношениях сигнал/шум в разных лучах приёма
выигрыш аналогичен выигрышу от применения способов разнесённого приёма.
Таким образом, можно сделать вывод, что методы разнесённого приёма играют одну из ключевых ролей в формировании облика современных систем радиодоступа и их развитие предопределяет дальнейшее улучшение характеристик устойчивости и пропускной способности.

128
Лекция 20 ПЕРЕДАЧА НЕПРЕРЫВНЫХ СООБЩЕНИЙ
20.1 Источники непрерывных сообщений
Источник непрерывных сообщений за время T выдаёт любую реализацию из бесконечного множества реализаций сообщения Si(t) {S1(t)…S (t)}. Ансамбль сообщений непрерывного источника бесконечен, а вероятность появления любого из них
P(Si(t)) = 0.
Энтропия непрерывного источника оценивается по разности значений абсолютной энтропии и опорной энтропии.
Для сообщений надо определить эквивалентные классы.
Два сообщения эквивалентны, если различие несущественно в смысле наперёд заданного критерия. Критерием может быть разборчивость речи, тогда сообщения, полученные от разных людей, но одинаковые по содержанию, будут эквивалентны.
Верностью передачи непрерывных сообщений будем называть вероятность, того, что принятое сообщение S*(t)эквивалентно переданному S(t).
Критерий эквивалентности задаётся степенью точности передачи сообщений, например, допустимым значением максимальной разности
= | Si(t) – S(t) |max
За период t [0, Tc].
В качестве критерия частот используется МСКО
|
|
|
|
2 |
|
|
|
||
|
2 |
(t) (S*(t) S(t)) , |
||
чаще всего (t) 0, т. е. смещение S*(t) относительно S(t) отсутствует.
Если S(t) – гауссовский случайный процесс, то при критерии МСКО
(t) = S*(t) – S(t)):
|
|
|
|
|
1 |
|
2 |
|
1 |
|
P |
|
|
2 e 2 |
|
2 e 2 |
|
|
|
|
|||||
H(S) log |
log |
|
|
log |
S |
|
|
log |
s |
. |
||
|
2 |
|
2 |
|||||||||
|
S |
|
|
|
2 |
|
|
2 |
|
|
||
|
|
|
|
|
|
|
|
|
|
|||
Так как PS – мощность сигнала, а 2 – мощность шума, то
H(S) 1loghс2/ш . 2
Отношение hс2/ш – это минимальное отношение сигнал/шум, при котором S*(t) и S(t) ещё эквивалентны с вероятностью, близкой к единице.
Для непрерывного источника производительность источника можно определить как
Vи VM Р(S) V 1 log(2 ePS ), 2
а скорость передачи информации

129
V VM (H(S) H ) FS log PS2 FS loghс2/ш .
Теорема Шеннона для непрерывных сообщений
Если при заданном критерии эквивалентности источника сообщений 02 его производительность меньше пропускной способности канала (Vи < С), то существует способ преобразования сообщения в сигнал и сигнала в сообщение, при котором неточность воспроизведения будет сколь угодно близки к02. При Vи > С такого способа не существует.
Теорема доказывается через дискретизацию, так как для дискретного процесса она уже доказана.
В общем случае для восстановления S(t) с заданной точностью не обязательно, чтобы выполнялось неравенство
hс2/ш hmin2 .
Необходимо только, чтобы пропускная способность канала превышала производительность источника.
20.2 Непосредственная передача сообщений
Пусть в канале передаётся сигнал
uS(t) = KS(t),
тогда на выходе канала
y(t) = uS(t) + n(t) = KS(t) + n(t).
Для получения сообщения требуется из сигнала y(t) выделить сигнал uS(t). Оценим погрешность выделения полезного сигнала
2
2(t) (S*(t з) S(t)) ,
где з – время задержки.
Если S(t) и n(t) – независимые, стационарные случайные процессы, то для известных спектральных плотностей GS(f) и Gn(f) получим передаточную функцию оптимального фильтра
|
|
|
K( j ) |
GS ( f ) |
|
|
. |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
GS ( f ) Gn( f ) |
|
|
||||||
Погрешность оценки тогда |
|
|
|
|
|
|
|
|||||
|
|
2(t) |
K( j )Gn( f )df |
|
GS ( f )Gn (t) |
df . |
||||||
|
||||||||||||
|
|
|||||||||||
|
|
|
|
G |
S |
( f ) G |
( f ) |
|||||
|
|
|
|
|
|
|
n |
|
|
|||
Погрешность равна нулю, когда спектры сигнала и шума не пересекаются, а так как Gn(f) = N0, то можем переписать
|
|
|
|
G ( f ) |
|
|
|
2 (t) N0 |
|
|
S |
|
df . |
G |
S |
( f ) N |
0 |
|||
|
|
|
|
|