

2.1.1. Cell Identifications (Cell id)
Метод Cell ID предусматривает определение местоположения абонента по активной соте, в которой он находится.
Плюсом метода Cell ID является то, что метод не требует доработки МС. Погрешность определения координат МС в данном случае соизмерима с размерами соты (ячейки) и может достигать в сетях стандарта GSM 150 м в городе и 20-30 км в сельской местности, а в сетях CDMA – до 50 км. Такая точность слишком мала, и назвать эти величины приемлемыми нельзя.
Более высокую точность определения местоположения мобильной станции в ячейке обеспечивает технология Cell ID-ТА, основанная на определении величины задержки распространения сигнала (Timing Advance, ТА) от базовой станции до мобильной станции в пределах ячейки. Для определения ТА в режиме ожидания система определения местоположения инициирует пейджинг (своеобразный незаметный абоненту вызов) мобильной станции, в результате сеть получает идентификатор БС и значение величины задержки ТА. С помощью временной задержки рассчитывается удаление МС, при этом получается окружность, на которой она может находиться. Учитывая, что базовые станции имеют антенны, расположенные по секторам, можно определить, в каком секторе находится МС. Точность определения местоположения МС зависит от топологии радиосети и прочих условий. Полученные таким образом координаты МС являются примерными.
Проблема в том, что сектор может составлять от 30 до 120 градусов, и разброс величин достаточно большой. При использовании в сети оператора секторных антенн с углами 30/45 градусов точность в среднем составляет около 200-300 метров.
В сети доступа UTRAN данная технология также может использоваться с некоторыми изменениями. Код ID соты, в зоне которой находится МС, можно определить не только с помощью пейджинга, но и с помощью других процедур UTRAN. Вместо ТА в сетях UTRAN возможно измерение следующих параметров:
- разница между временем приема сигнала и реальным временем (Real Time Difference, RTD);
- отклонение времени приема (Rx Timing Deviation, RxTD);
- задержка времени распространения сигнала от абонентского оборудования (User Equipment Timing Advance, UETA).
2.1.2. Rtt (Round Trip Time)
RTT
– время между отправкой запроса и
получением ответа. При помощи данного
метода рассчитывается расстояние от
базовой станции (БС) или LMU (Location Measurement
Unit, модуль измерения местоположения)
до МС с использованием модели
распространения сигнала (Рис. 2.1).
Расстояние – это радиус круга вокруг
базовой станции. Поэтому, если это
возможно, для более точной оценки
положения МС следует использовать в
вычислениях данные измерений времени
RTT от соседних БС. Тогда МС будет находиться
в точке пересечения трех окружностей
соседних БС, расположенных в центрах
этих окружностей. Погрешность оценки
местоположения МС определяется пределами
погрешностей всех измерений RTT.
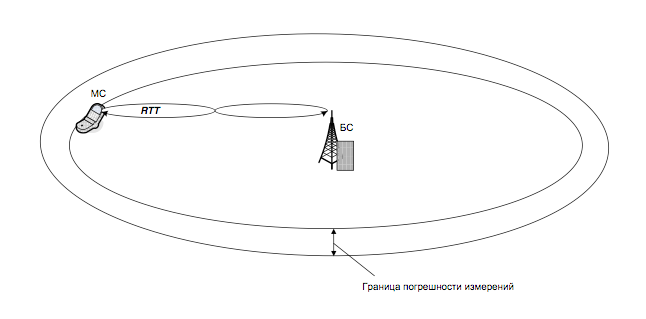
Рис. 2.1 – Метод позиционирования RTT
Расстояние между МС и БС можно выразить через время и скорость радиоволны определяется выражением (1):
D=RTT*c/2+e, (1)
где:
D – расстояние от МС до БС;
c – скорость распространения радиоволны в соте, равная скорости света в свободном пространстве;
RTT – время обращения;
e– погрешность измерений.
Точность измерения RTT в сетях UMTS значительно выше.