

9635
.pdfЛекция 48. Системы дифференциальных уравнений
48.1. Нормальные системы. Во многих задачах математики, физики, механики требуется найти несколько функций, связанных между собой дифференциальными уравнениями. Совокупность таких уравнений называется системой дифференциальных уравнений. Например, расчёт траектории полёта ракеты к Луне сводится к решению системы из двенадцати дифференциальных уравнений второго порядка (по «закону всемирного тяготения» рассматривается движение четырёх тел: ракеты, Луны, Земли и Солнца).
Выделяют так называемые нормальные системы дифференциальных уравнений следующего вида
|
dy1 |
|
|
f (x, y , |
, y ), |
||
d x |
|||||||
1 |
1 |
n |
|||||
|
|
||||||
|
|
|
|
|
|
||
dy2 |
|
|
f2 (x, y1, |
, yn ), |
|||
|
|
|
|
||||
|
|
||||||
d x |
|
|
|
|
|
||
|
|
|
|
|
|
||
|
|
|
|
|
|
||
|
dyn |
|
|
fn (x, y1, |
, yn ) |
||
|
|
|
|||||
d x |
|
|
|
|
|
||
|
|
|
|
|
|
||
Решение системы – это совокупность функций
y1(x), y2 (x), , yn (x), a x b,
удовлетворяющих каждому из уравнений системы. Ясно, что это не любые функции, а дифференцируемые функции в указанном промежутке.
К нормальной системе дифференциальных уравнений может быть приведено дифференциальное уравнение высокого порядка. В частности, мы уже сталкивались ранее с решением дифференциального уравнения второго порядка вида y f (x, y ) , т.е. когда уравнение не содержало в
явном виде неизвестную функцию y . В этом случае мы вводили ещё одну неизвестную функцию p(x) y и, тем самым, сводили решение уравнения второго порядка к решению системы двух уравнений первого порядка
dy pdx
dp f (x, p)
dx
Только эта система очень просто «устроена»: сначала нужно решить второе уравнение относительно функции p(x) , а затем вернуться к первому
уравнению и найти y(x) .
К нормальной системе дифференциальных уравнений сводится математическая модель движущейся материальной точки массы m . Пусть
r (t) x(t)i y(t) j z(t)k
радиус-вектор этой точки в декартовой системе координат. Скорость и ускорение точки определяются формулами
|
dr |
|
dx |
dy |
|
dz |
|
|
|
|
d 2r |
|
|
|
|
|
|
|
|
d 2 x |
|
|
|
|
|
|
d 2 y |
|
|
|
d 2 z |
|
||||||||||||
|
|
v(t) |
|
i |
|
j |
|
k ; |
|
|
|
|
|
a(t) |
|
|
|
|
|
|
i |
|
|
|
j |
|
|
k. |
||||||||||||||||
|
dt |
dt |
dt |
dt |
d t2 |
d t 2 |
|
d t 2 |
d t 2 |
|||||||||||||||||||||||||||||||||||
Сила |
f , под действием которой движется точка, является функцией |
|||||||||||||||||||||||||||||||||||||||||||
времени, координат точки и компонент ее скорости |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
f f (t, x, y, z, |
dx |
, |
dy |
, |
dz |
) fxi f y j fz k . |
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
dt |
dt |
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
На основании второго закона |
Ньютона имеем |
|
|
|
|
|
|
|
|
d 2r |
|
f |
F |
или в |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
d t2 |
m |
|||||||||||||||||||||||||||||||||||
координатной записи |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
d 2 x |
|
Fx (t, x, y, z, |
|
dx |
, |
|
dy |
, |
|
|
dz |
|
), |
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
dt |
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
d 2 y |
|
Fy (t, x, y, z, |
|
dx |
|
, |
|
dy |
|
, |
|
dz |
|
), |
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
dt |
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
d 2 z |
|
F (t, x, y, z, |
|
dx |
, |
|
dy |
, |
|
dz |
) |
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
dt |
2 |
|
|
z |
|
|
|
|
|
|
|
dt |
|
|
|
dt |
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Если считать неизвестными не только координаты точки, но и проекции скорости точки на координатные оси, то придём к нормальной системе из шести дифференциальных уравнений. Здесь производные по переменной t обозначены для краткости точкой сверху.
Решив эту систему, можно получить не только траекторию движения точки, но и закон изменения её скорости.
Покажем, как можно найти интегральные кривые нормальной системы в простейшем случае двух линейных дифференциальных уравнений с постоянными коэффициентами вида
x ax by |
, |
(48.1) |
|
||
y cx dy |
|
|
где x x(t) , |
y y(t) – неизвестные функции времени. Из (48.1) следует, |
||||
что |
|
|
|
|
|
|
|
dy |
|
cx dy |
, |
|
|
dx |
ax by |
||
|
|
|
|
||
а это есть не что иное, как дифференциальное уравнение |
первого порядка |
относительно неизвестной функции y y(x) , правая |
часть которого |
является однородной функцией своих аргументов. Согласно методу решения таких уравнений полагаем y / x u , где u – новая переменная, и
задача сводится к решению уравнения с разделяющимися переменными u и x .
48.2. Математическая модель «хищник-жертва». К нормальной системе дифференциальных уравнений приводится математическая модель, описывающая борьбу двух видов в живой природе (более подробно см. Ю.И. Неймарк «Математические модели в естествознании и технике», издательство ННГУ, 2004 г.). Эта модель связана с именами биофизика Альфреда Лотки (1880-1949) и математика Вито Вольтерра (1860-1940).
Рассмотрим пруд, в котором живут караси и щуки. Обозначим через x(t) и y(t) – функции, соответствующие числу карасей и щук в момент
времени t . Будем предполагать, что x и y достаточно велики, чтобы эти
функции можно было считать непрерывными и даже дифференцируемыми. Предполагается также, что в пище для карасей нет недостатка, и в отсутствии щук караси размножаются экспоненциально со скоростью

dxdt kx, k 0,
которая пропорциональна их количеству. Что касается щук, то без карасей они вымирают экспоненциально со скоростью
dy |
l y, |
l 0. |
|
dt |
|||
|
|
Предположим, что число «встреч» карасей со щуками пропорционально как числу карасей, так и числу щук, поэтому функция, определяющая количество карасей, удовлетворяет уравнению
dx |
kx axy, |
a 0. |
|
dt |
|||
|
|
Щуки, съедая карасей, начинают размножаться со скоростью, пропорциональной числу этих «встреч», т.е. в результате получим уравнение
dy |
ly bxy, |
b 0. |
|
dt |
|||
|
|
Таким образом, приходим к системе уравнений Лотки – Вольтерра, представляющей собой простейшую модель экологической системы хищник—жертва
x kx axy
. (48.2)
y ly bxy
Коэффициенты этой системы «добываются» путём наблюдений, а ее решения находятся с помощью численного интегрирования. Ниже будут показаны графики решений для конкретной системы.
Некоторое качественное представление о сосуществовании карасей и щук может быть получено путем приведения этой системы к дифференциальному уравнению, связывающему между собой переменные x и y непосредственно, исключив из рассмотрения переменную t . А
именно, если в системе (48.2) разделить одно уравнение на другое, то приходим к дифференциальному уравнению с разделяющимися переменными
k ay |
dy |
bx l |
dx. |
|
|
|
|
||
y |
|
x |
(48.3) |
|
|
|
|
|
|
Общее решение этого уравнения имеет вид k ln y ay bx l ln x C ,
поэтому его интегральные кривые можно представлять как линии уровня функции
z(x, y) bx ay l ln x k ln y .
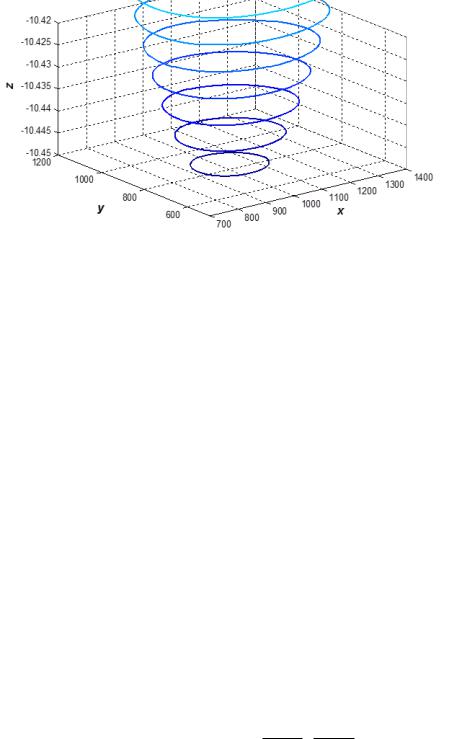
Рис. 48.1
На рис. 48.1 для конкретной системы (48.4) показаны сечения поверхности z(x, y) горизонтальными плоскостями. Из этого рисунка
видно, что ее линии уровня представляют собой замкнутые кривые и что эта функция, по-видимому, имеет минимум. Действительно, приравнивая к нулю частные производные
получаем, что в точке |
|
M |
0 |
(x0 |
|
|
|
|
|
Вычисляя вторые производные |
|
|||
2 z |
|
l |
, |
|
x2 |
x2 |
|
||
z |
b |
|
l |
|
|
|
x |
|
x |
||
|
|
|
|||
|
z |
|
|
k |
|
|
a |
||||
|
y |
y |
|||
|
|
|
|
|
|
l / b, |
y0 k / a) |
возможен экстремум. |
||||
|
2 z |
0, |
2 z |
|
k |
, |
|
x y |
y2 |
y2 |
|||
убеждаемся, что здесь выполняется достаточное условие экстремума
AC B2 (xl0 )2 ( yk0 )2 0 .
В качестве иллюстрации рассмотрим, например, систему
|
|
x 0,8x 0,001xy |
|
|
|
|
|
||
|
|
|
y 0,001xy |
|
|
|
|
|
|
|
|
y |
|
|
|
|
(48.4) |
||
|
|
|
|
|
|
|
|
|
|
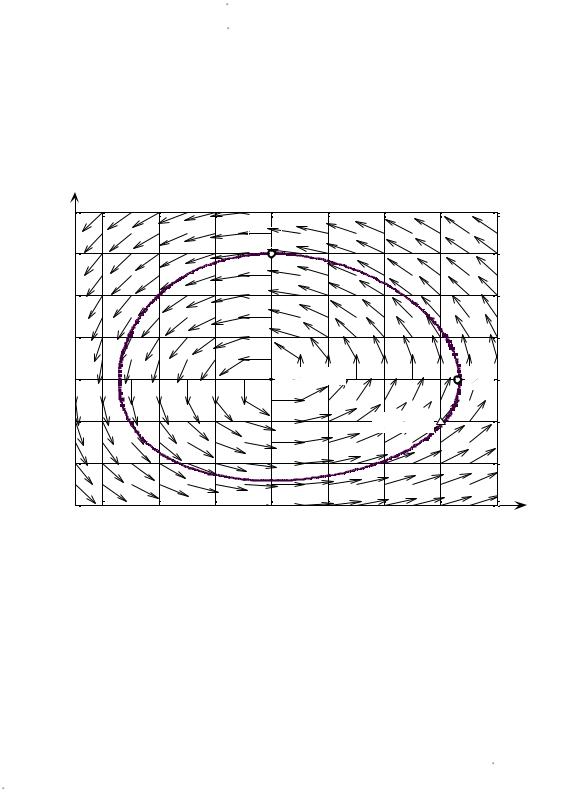
Ее правая часть определяет векторное поле скоростей (см. рис. 48.2) |
|||||||||
изменения количества карасей и щук: в каждой точке |
(x, y) |
мы имеем |
|||||||
вектор |
|
|
|
|
|
|
|
|
|
|
|
(0,8x 0,001xy; y 0,001xy) . |
|
|
|
||||
1200 |
|
|
|
|
|
|
|
|
|
1100 |
|
|
M2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1000 |
|
|
|
|
|
|
|
|
|
900 |
|
|
|
|
|
|
|
|
|
800 |
|
|
(1000,800) |
|
|
M |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
700 |
|
|
|
|
(1300.700) |
|
|
|
|
600 |
|
|
|
|
|
|
|
|
|
500 |
|
|
|
|
|
|
|
|
|
700 |
800 |
900 |
1000 |
1100 |
1200 |
1300 |
|
1400 |
|
Рис. 48.2
Дифференциальное уравнение (48.3) для этой системы имеет замкнутые интегральные кривые, подобные показанной кривой на рис. 48.2. Решения же x(t) и y(t) системы (48.4) определяют координаты точки,
«пробегаемой» с течением времени по этим интегральным кривым. Каждая замкнутая интегральная кривая соответствует периодическим колебаниям количеств щук и карасей, причем направление «движения» по кривой определяется исходной системой дифференциальных уравнений (48.4).
Пусть, например, сначала было 1300 карасей и 700 щук. Подставляя эти значения в правую часть системы (48.4), получим x(0) 910 0 ,
y(0) 210 0 . Следовательно, начиная с точки (1300,700) происходит рост как количества карасей, так и количества щук. Затем с точки M1 количество
карасей убывает, а количество щук продолжает расти. Когда пищи для щук станет совсем мало, то их количество начнет уменьшаться (с точки M 2 ) и
т.д.
Точка |
|
(x0 l / b, y0 k / a) (1000, 800) , |
в которой |
правые |
части |
|||||
уравнений (48.4) обращаются в ноль, соответствует состоянию равновесия |
||||||||||
системы, когда прирост карасей уравновешивается «деятельностью» |
щук, а |
|||||||||
прирост щук – их естественной смертностью. |
|
|
|
|
||||||
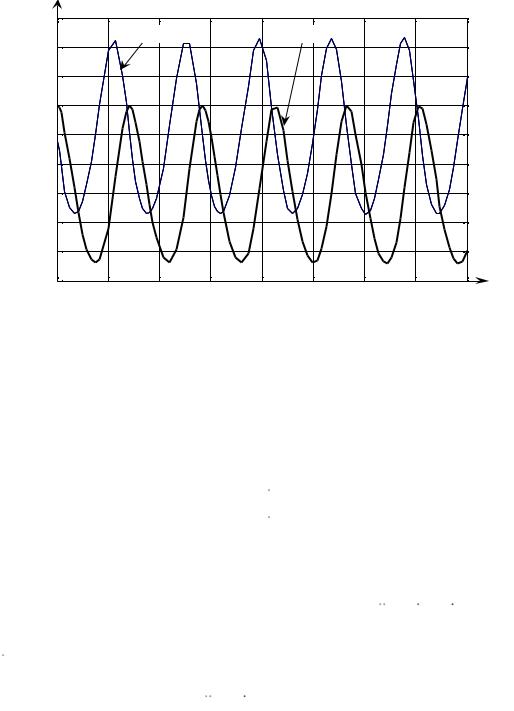
На рис. 48.4 приведены графики решения системы (48.4) с |
|
|||||||||
начальными условиями (x(0) 1000, y(0) 1100) , полученные численным |
||||||||||
интегрированием. |
|
|
|
|
|
|
|
|
||
1400 |
|
|
|
|
|
|
|
|
|
|
|
|
|
караси |
|
|
щуки |
|
|
|
|
1300 |
|
|
|
|
|
|
|
|
|
|
1200 |
|
|
|
|
|
|
|
|
|
|
1100 |
|
|
|
|
|
|
|
|
|
|
1000 |
|
|
|
|
|
|
|
|
|
|
900 |
|
|
|
|
|
|
|
|
|
|
800 |
|
|
|
|
|
|
|
|
|
|
700 |
|
|
|
|
|
|
|
|
|
|
600 |
|
|
|
|
|
|
|
|
|
|
500 |
0 |
5 |
10 |
15 |
20 |
25 |
30 |
35 |
40 |
|
Рис.48.4
48.3. Метод исключения. Выше мы показали, как дифференциальное уравнение высокого порядка сводится к нормальной системе дифференциальных уравнений. Иногда систему дифференциальных уравнений решают методом исключения – приведением системы к дифференциальному уравнению высокого порядка. Продемонстрируем этот метод на примере линейной системы второго порядка
x ax byy cx dy.
Сведём ее решение к решению одного дифференциального уравнения второго порядка. Для этого продифференцируем по переменной t одно из уравнений системы, например, первое уравнение x ax by . Для того,
чтобы исключить из полученного уравнения переменную y , подставим в него y из второго уравнения данной системы
x ax bcx bdy .

Наконец, выражая переменную y из первого уравнения системы, получаем
однородное дифференциальное уравнение второго порядка с постоянными коэффициентами относительно неизвестной функции x x(t)
|
|
x (a d )x (bс ad )x 0 . |
|
|
|
|||||||
Подставив найденное решение |
|
|
x(t) C1x1 (t) C2 x2 (t) |
|
в первое уравнение |
|||||||
системы, получим вторую функцию |
|
|
|
|
|
|
||||||
y(t) |
1 |
(x ax) |
1 |
(C x (t) C x (t) a(C x (t) C x (t)) . |
||||||||
|
|
|||||||||||
|
b |
b |
1 |
1 |
2 |
2 |
1 |
1 |
2 |
2 |
||
|
|
|
|
|
|
|
|
|
||||
Ясно, что метод симметричен. Дифференцируя второе уравнение системы и исключая переменную x , получим уравнение второго порядка относительно функции y y(t)
y (a d ) y (bс ad ) y 0 .
Раздел 9. Кратные интегралы
Лекция 49. Двойной интеграл: определение, свойства
В этой лекции мы переходим к рассмотрению способов интегрирования функций многих переменных. Интегралы, которые будут введены, являются обобщением понятия определённого интеграла для функции одной переменной. Напомним, что соответствующая лекция начиналась с рассмотрения задачи вычисления площади криволинейной трапеции. Сохраняя прежнюю логику рассуждений, начнём с геометрической задачи – нахождения объёма цилиндрического тела.
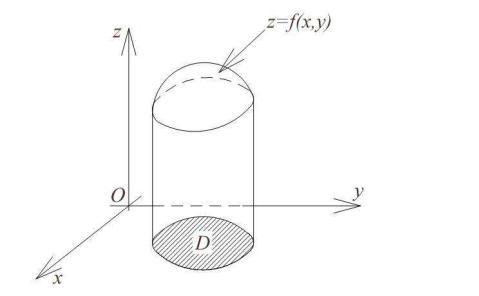
49.1. Задача о вычислении объёма цилиндрического тела. Пусть на
плоскости xOу задана область |
D , ограниченная линией |
L (где L - |
замкнутая кривая без самопересечений), и пусть в области |
D определена |
|
некоторая непрерывная функция |
z f (x, y) 0 . |
|
Цилиндрическим телом будем называть тело G , ограниченное
1)плоскостью xOу ,
2)поверхностью z f (x, y) ,
3)цилиндрической поверхностью с образующей, параллельной оси Oz и направляющей L (рис. 49.1).
Рис. 49.1
Заметим, что это название достаточно условное. Например, полушар и конус оказываются «цилиндрическими телами». Некоторые авторы употребляют термин «тело с двумя крышками».
Ставим задачу найти объём тела G . Отметим, прежде всего, два принципа, из которых следует исходить при определении объёма произвольного пространственного тела:

1.Если тело G разбито на составные части G1,G2,...,Gn , то его объём V равен сумме объёмов всех частей, т.е. V V1 V2 ... Vn .
2.Если цилиндрическое тело G представляет собой прямой цилиндр с высотой H и площадью основания S , то V SH .
Теперь разобьём область D на подобласти D1, D2 , ..., Dn . Здесь и далее
под разбиением будем понимать представление D в виде объединения областей D1, D2 , ..., Dn , которые пересекаются между собой только по
границе (т.е. не имеют общих внутренних точек). В соответствии с этим тело G разобьётся на цилиндрические тела G1,G2,...,Gn , ограниченные сверху
кусками поверхности z f (x, y) (рис. 49.2).
Рис. 49.2
Выберем в каждой частичной подобласти Di произвольную точку Pi (xi , yi ) и заменим цилиндрическое тело Gi прямым цилиндром с тем же основанием (площади Si ) и высотой hi f (xi , yi ) . По принципу 2 объём этого прямого цилиндра равен Vi f (xi , yi ) Si . Суммируя объёмы всех
прямых цилиндров, получим объём «ступенчатого» тела, дающий приближённое значение объёма исходного цилиндрического тела
|
|
n |
|
|
V f (xi , yi ) Si . |
(49.1) |
|
|
|
i 1 |
|
Ясно, что чем «мельче» |
будет разбита область D на части, тем точнее |
||
объём «ступенчатого» |
тела |
будет соответствовать тому числу, которое |
|
следует считать объёмом тела G . За точное значение объёма естественно |
|||
принять предел сумм |
(49.1) при неограниченном |
увеличении числа |
|