

9562
.pdf
|
dJxy = xydA – xydA = 0. |
|
|
Интегрируя по площади сечения, имеем Jxy |
= 0. |
|
|
Таким образом, центробежный момент инерции сечения относительно осей, из кото- |
|||
рых одна или обе являются осями симметрии, равен нулю. |
|
||
Складывая осевые моменты инерции и учитывая, что ρ 2 = х2 |
+ у 2 , получим |
||
Jx + Jy = ∫ y 2 dA + ∫ x 2 dA = ∫ (x 2 + y 2 ) dA = ∫ ρ 2 dA = Jp , |
|||
A |
A |
A |
A |
т.е. сумма осевых моментов инерции относительно двух взаимно перпендикулярных осей рав-
на полярному моменту инерции относительно точки пересечения этих осей:
Jx + Jy = Jρ .
Осевой момент инерции сложного сечения относительно некоторой оси равен сумме осевых моментов инерции составляющих его частей относительно этой же оси.
Аналогично, центробежный момент инерции сечения относительно двух взаимно перпенди-
кулярных осей равен сумме центробежных моментов инерции составляющих его частей от-
носительно этих же осей.
Полярный момент инерции сложного сечения относительно некоторой точки равен сумме полярных моментов инерции составляющих его частей относительно этой же точки.
Следует помнить, что нельзя суммировать моменты инерции, вычисленные относительно различных осей и точек.
3. Моменты инерции простейших сечений.
1). Осевые моменты инерции прямоугольного сечения шириной b и высотой h относительно осей симметрии прямоугольника х и у (рис. 16).
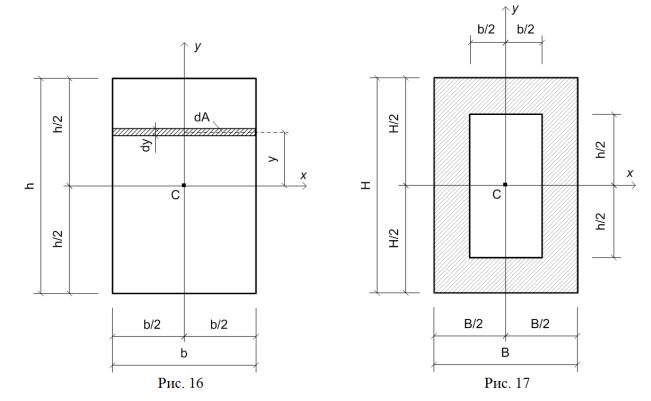
Выделим линиями, параллельными оси х, элементарную полоску высотой dy и шири-
ной b. Площадь этой полоски dA = b dy, а координата её центра тяжести – у. Пределы интег-
рирования: от y = - h/2 до y = + h/2. Вычислим осевой момент инерции прямоугольника от-
носительно оси симметрии х:
|
|
|
|
|
h / 2 |
|
|
|
b h |
3 |
|
||
|
|
Jx = ∫ y 2 dA = b ∫ y 2 dy = |
|
. |
|||||||||
|
|
|
|||||||||||
|
|
|
A |
−h / 2 |
12 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
||||
Аналогично, Jy = |
h b 3 |
. Оси х и у – |
оси симметрии фигуры, поэтому Jxy = 0. |
||||||||||
|
|
||||||||||||
12 |
|
|
|
|
|
|
|
|
|
|
|
||
Для квадратного сечения h = b = a и |
Jx = Jy |
= |
a 4 |
. |
|
|
|
||||||
|
|
|
|||||||||||
|
|
|
|
|
|
|
12 |
|
|
|
|
|
|
Для прямоугольного коробчатого сечения (рис. 17) моменты инерции равны разности |
|||||||||||||
моментов инерции большого прямоугольника и малого прямоугольника: |
|||||||||||||
Jx = |
B H 3 − b h 3 |
; Jy = |
H B 3 − h b 3 |
; Jxy = 0 . |
|||||||||
|
|
||||||||||||
|
|
|
12 |
|
|
|
12 |
|
|
|
|
|
|
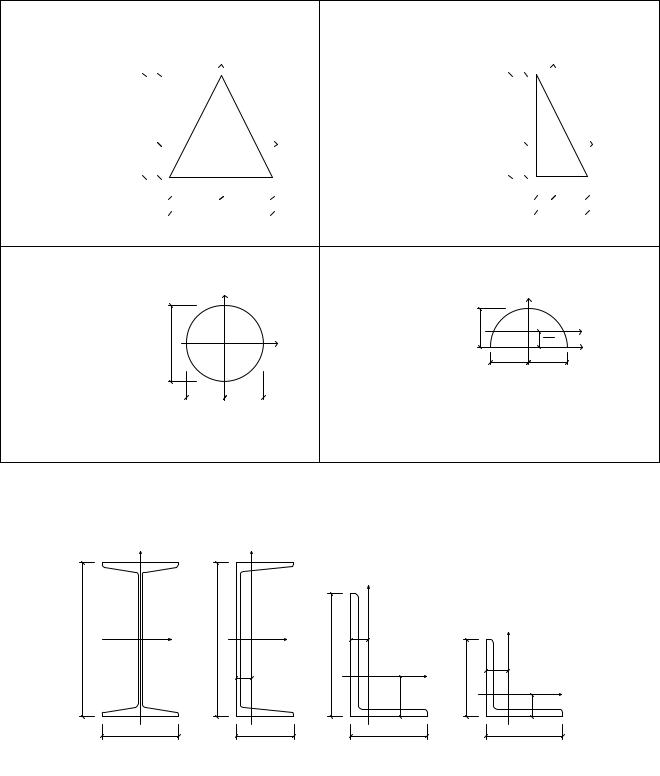
2). Равнобедренный треугольник |
3). Прямоугольный треугольник |
|||||||||||||||||||||||||||
Jx |
= |
b h 3 |
; |
|
|
|
|
|
|
|
|
|
Jx |
= |
|
b h 3 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
36 |
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
36 |
|
|
|
|
|
|
|
|
|
|
||||
|
= |
h b 3 |
|
|
|
|
|
|
|
|
|
|
|
Jy |
= |
h b 3 |
|
|
|
|
|
|
|
|
|
|||
Jy |
|
; |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
48 |
|
|
|
|
|
|
|
|
|
|
|
36 |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Jxy |
= ± |
b 2 h 2 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
Jxy = 0. |
|
|
|
|
|
|
|
|
|
|
|
|
72 |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4). Круг |
|
|
5). Полукруг |
|
||
Jx |
= |
π d |
4 |
J x1 |
= π d 4 ; |
|
64 |
; |
|
128 |
4r |
||
|
|
|
|
= π d 4 |
3 π |
|
Jy |
= |
π d |
4 |
J y |
; |
|
|
; |
|
128 |
|
||
|
|
64 |
|
|
|
|
|
|
J |
x |
= π d 4 (1− |
64 |
) ; J |
xy |
= 0. |
|
|
|||||||
|
|
|
||||||
Jxy = 0 . |
|
|
128 |
9π 2 |
|
|||
|
|
|
|
|
||||
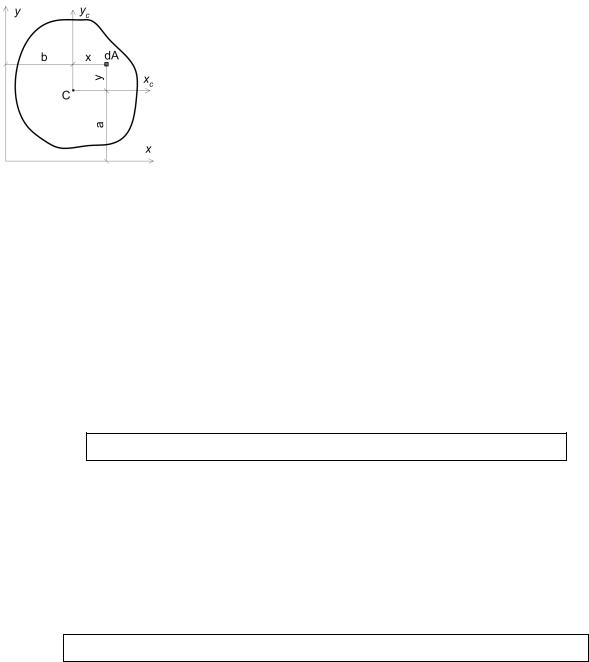
В строительстве широкое применение находит прокатная сталь. Сечения прокатных профилей показаны на рис. 18:
Рис. 18
Геометрические характеристики прокатных профилей определяют из таблиц на про-
катную сталь.
4. Преобразование моментов инерции при параллельном переносе осей.
Установим зависимость между моментами инерции одного и того же сечения относи-
тельно разных, но параллельных осей. |
|
|
|
|
|
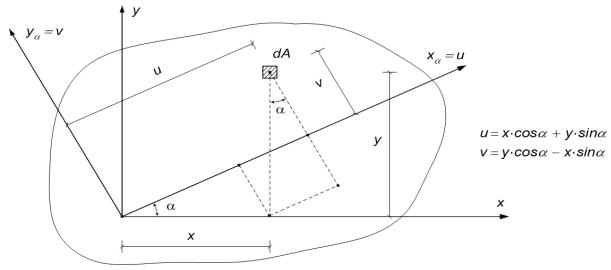
Предположим, что моменты инерции сечения относительно её цен- |
|||
|
тральных осей |
Jxc , Jyc , J xc yc |
известны (рис. 19). |
|
|
Необходимо определить моменты инерции сечения относительно |
|||
|
произвольных осей х и у, параллельных центральным осям хс и ус это- |
|||
|
го сечения. |
|
|
|
|
Используя обозначения рисунка 19, вычислим осевой момент |
|||
Рис. 19 |
инерции сечения относительно оси х. |
|
||
|
J x = ∫( y + а) 2 dA = ∫ y 2 dA + 2 a ∫ y dA + a 2 ∫dA = J xc + 2 a S xc + a 2 A . |
|||
|
A |
A |
A |
A |
Учитывая, что статические моменты фигур относительно центральных осей равны нулю:
Sxc = 0 , в результате получаем
Jx = Jxc + a 2 A .
Выполняя аналогичные вычисления для второго осевого момента инерции и центро-
бежного момента инерции, будем иметь следующие формулы преобразования моментов инер-
ции при параллельном переносе осей
Jx = Jxc + a 2 A . Jy = Jyc + b 2 A . Jxy = Jxc yc + a b A .
Из формул для осевых моментов инерции следует, что для всех параллельных осей наименьшее значение осевые моменты инерции имеют относительно центральных осей хс и ус.
Если заданное сечение можно разбить на простейшие фигуры, то полученные формулы вы-
числения моментов инерции при параллельном переносе осей можно записать в следующем виде
J x = ∑( J xi + a i2 A i ) ; J y = ∑( J yi + b i2 A i ) ; J xy = ∑( J xi yi + a i b i A i ) .
5. Преобразование моментов инерции при повороте осей.
Предположим, что моменты инерции сечения Jx, Jy, Jxy относительно заданной системы координат х, у известны. Повернём заданную систему координат вокруг начала координат на произвольный угол ά (рис. 20). Положительным будем считать угол поворота от положитель-
ного значения х к положительному значению у.
На рис. 20 показан положительный угол поворота для заданной системы координат.
Формулы, связывающие координаты центра тяжести элементарной площадки dA в новой (по-
вёрнутой) и старой системах координат, приведены на рис. 20.
|
Рис. 20 |
6. Главные оси инерции. Главные моменты инерции. |
|
Как было установлено ранее, |
Jx + Jy = Jp . |
Если оси координат поворачивать в своей плоскости вокруг начала координат, то по-
лярный момент инерции останется неизменным, а осевые моменты инерции будут изменяться,
причём Jx + Jy = const.
Если сумма двух переменных величин остаётся постоянной, то одна из них уменьшает-
ся, а другая увеличивается. Следовательно, при каком-то положении осей один из осевых мо-
ментов инерции достигает максимального значения Jmax, а другой момент инерции - мини-
мального значения Jmin.
Оси, относительно которых моменты инерции имеют максимальное и минимальное зна-
чения, называются главными осями инерции, а моменты инерции – главными момен-
тами инерции.
В теории моментов инерции доказывается, что центробежный момент инерции равен нулю: Jxy = 0 относительно главных осей инерции.
Ранее мы установили, что центробежный момент инерции равен нулю, если одна из осей х или у – ось симметрии. Кроме того, ось симметрии – центральная ось.
Следовательно, оси симметрии фигуры являются главными центральными осями инерции.
Величины главных моментов инерции можно определять по формуле

|
|
|
Jx + Jy |
|
1 |
|
|
|
|
J max |
= |
± |
|
( Jx − Jy ) 2 + 4 J 2xy . |
|||||
|
|
||||||||
|
|
2 |
2 |
|
|
|
|||
|
min |
|
|
||||||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
Ось, относительно которой момент инерции достигает максимального значения, назы-
вается осью максимум или первой главной осью инерции.
Ось, относительно которой момент инерции достигает минимального значения, назы-
вается осью минимум или второй главной осью инерции.
Поскольку сумма осевых моментов инерции должна оставаться постоянной, то для проверки вычислений можно использовать равенство
Jx + Jy = Jmax + Jmin .
Углы наклона главных осей инерции относительного исходной оси х можно определять по следующим формулам
tg αmax |
= |
|
Jxy |
; tg αmin |
= |
|
Jxy |
. |
|
Jy |
− Jmax |
Jy |
− Jmin |
||||||
|
|
|
|
|
Из формул следует, что, если один из углов получится положительным, то другой бу-
дет обязательно отрицательным. Для проверки вычислений можно использовать условие, что сумма абсолютных значений углов должна быть равна девяносто градусов:
αmax + αmin = 90o .
7. Моменты сопротивления сечений.
При решении задач изгиба и кручения используется геометрическая характеристика се-
чения, которая называется моментом сопротивления.
Осевым моментом сопротивления называют отношение главно-
го центрального момента инерции к расстоянию от главной цен-
тральной оси до самой удалённой точки на внешнем контуре се-
чения (рис.21):
Wx( 1) = |
|
|
J |
x |
|
|
; Wx( 2 ) = |
|
|
J |
x |
|
|
; Wy |
= |
|
|
Jy |
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
y1 |
|
|
|
|
y2 |
|
|
|
|
x3 |
|
|
|||||||
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Моменты сопротивления вычисляются в мм3, см3 и т. д.
Моменты сопротивления величины положительные и не равны
нулю.
Рис. 21
Моменты сопротивления сложных сечений не равны сумме моментов сопротивлений состав-
ных частей сечения, за исключением некоторых фигур.
Подсчитаем моменты сопротивления прямоугольного сечения:

|
b h 3 |
|
|
b h 2 |
|
|
h b 3 |
|
|
h b 2 |
|
||||
Wx = |
12 |
|
= |
; Wy = |
|
12 |
|
= |
. |
||||||
|
|
|
|
|
|
|
|||||||||
|
|
h |
|
6 |
|
|
|
b |
|
6 |
|
||||
|
2 |
|
|
|
|
|
|
2 |
|
|
|
|
|
||
Момент сопротивления коробчатого сечения относительно оси х:
|
|
B H 3 − b h 3 |
|
B H 2 |
|
|
||
|
= |
12 |
= |
− |
||||
Wx |
|
|
|
|
1 |
|||
|
H |
|
6 |
|||||
|
|
|
|
|
|
|||
|
|
2 |
|
|
|
|
|
|
Осевой момент сопротивления круглого сечения:
π d 4
Wx = Wy = |
64 |
= π d 3 |
||
|
||||
|
|
d |
|
32 |
|
2 |
|
|
|
b h 3 B H 3 .
.
При решении задач кручения круглых стержней используются полярный момент инерции и полярный момент сопротивления.
Полярный момент инерции круга: Jp = Jx |
+ Jy |
= π d 4 |
+ π d 4 |
= π d 4 . |
|||
|
|
|
64 |
64 |
32 |
||
|
|
|
π d 4 |
= π d 3 . |
|||
Полярный момент сопротивления круга: |
Wp |
= |
32 |
||||
|
|||||||
|
|
|
|
d |
|
16 |
|
|
|
|
2 |
|
|
|
|
Лекция №3
Определение внутренних сил в стержнях
1. ВНЕШНИЕ И ВНУТРЕННИЕ СИЛЫ
Силы в сопротивлении материалов принято разделять на силы, действующие на конструкцию извне (внешние силы) и силы, возникающие в результате взаимодействия частей конструкции между собой (внутренние силы).
1.1 Активные и реактивные внешние силы
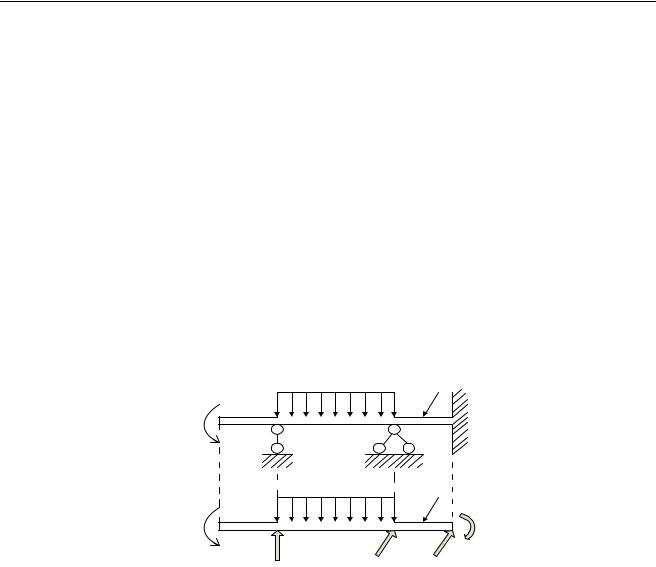
Рассмотрим тело (рис.22), у которого один размер значительно превышает два других
(стержень или брус). На него действует внешняя нагрузка: q, F, М. Это активные силы.
Рис. 22
Стержень имеет опоры А, В и С (рис.22а). Силы, с которыми опоры воздействуют на брус, по отношению к нему также являются внешними. Это реакции (реактивные силы): RA
,RB, Rc, Мс (рис.22б).
1.2Система координат.
Оси х и у будем считать главными центральными осями сечения и располагать в его плоскости. Ось z в этом случае будет направлена по оси стержня (геометрическое место цен-
тров тяжести всех поперечных сечений стержня) .
1.3 Определение опорных реакций.
Для определения n опорных реакций необходимо составить n уравнений равновесия,
следя за тем, чтобы уравнения были независимыми друг от друга. Для произвольной систе-
мы сил на плоскости можно составить три линейно независимых уравнения равновесия. Для системы параллельных сил - лишь два. По направлению связи возникает реакция (рис. 22).
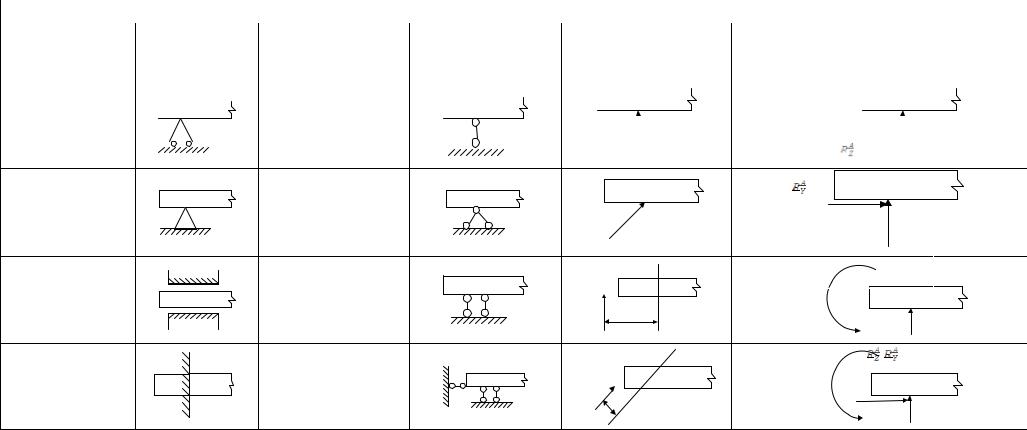
Характер и направление реакции на опоре определяется числом и расположением связей, что в свою очередь зависит от конструкции опоры (Табл. 1.1).
При составлении уравнений равновесия используют правило знаков, принятое в теоре-
тической механике.
- 3 0 -
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 1.1 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Различные виды опор, используемые при построении плоских и расчетных схем |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Схематическое |
|
|
Число и |
|
Характер и |
|
|
|
|
|
|||||||
Название опоры |
Запрещение степени свободы |
|
расположение |
|
направление |
Компоненты реакции |
||||||||||||
изображение |
|
|
||||||||||||||||
|
|
|
связей |
|
реакции |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Шарнирно- |
|
|
|
|
|
Перемещение по |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
ПОДВИЖНАЯ |
|
|
|
|
|
направлению |
|
|
|
|
|
|
|
|
|
|
|
|
опора |
|
|
|
|
|
связи |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Шарнирнонеподвижная
Перемещения по двум на-
опора
правлениям
|
Перемещение по направле- |
Ma |
Подвижная заделка |
|
|
нию связей и поворот |
A |
|
|
|
|
|
|
Ra |
Жесткая заделка |
Перемещение по двум на- |
|
правлениям и поворот |
|
|
|
|