

9530
.pdf
|
|
41 |
|
Подвижный стальной |
|
|
|
сердечник |
|
|
|
|
|
|
Дифференциально-трансформаторный |
|
|
|
преобразователь |
~ un = 12 B |
|
|
|
|
|
|
uвых |
|
|
Шток (тяга) |
|
Измерительная мембрана |
|
|
|
|
|
Импульсная трубка |
|
Мембранная коробка |
|
Труба под |
|
|
|
давлением |
|
|
P |
|
|
Рис. 2.10. Схематическая конструкция бесшкального электрического манометра |
|||
|
1 |
2 |
u1 |
|
|
|
|
|
|
3 |
u2 uвых |
|
|
4 |
|
u1, u2 |
|
|
|
|
u1 |
u2 |
|
|
|
|
|
|
|
|
t |
u1 |
|
u2 |
|
|
|
|
t |
|
|
uвых |
|
Рис. 2.11. Дифференциально-трансформаторный преобразователь: |
|||
а – принципиальная электрическая схема; б – изменение напряжения на обмотках |
|||
датчика при различных положениях сердечника |
|
||

42
При перемещении сердечника, например вниз (давление уменьшилось), напряжение u2 становится по амплитуде больше
напряжения u1 и их алгебраическая сумма равна напряжению выхода uвых . Амплитуда напряжения на выходе датчика пропорциональна
перемещению сердечника, а фаза напряжения характеризует направление перемещения относительно среднего положения. Это значит, что таким датчиком можно измерять как избыточное давление, так и разрежение (например, в топке котла).
В качестве датчика давления может применяться электроконтактный манометр. Это шкальное устройство с переставным электрическим контактом или двумя контактами, например для регулирования давления по верхнему и нижнему значению. При достижении стрелки электрического контакта этот контакт замыкается или размыкается, и в результате включается исполнительное устройство. Электроконтактные манометры широко применяются для автоматизации систем теплоснабжения.
2.2.4. Датчики для измерения расхода
Датчики и методы измерения расхода жидкостей или газов подробно исследованы и освещены в литературе [6] и отличаются большим разнообразием.
Для систем теплоэнергетики имеет смысл рассмотреть датчики и метод измерения расхода по переменному перепаду давления, по постоянному перепаду давления и датчики индукционных расходомеров, т.к. все они наиболее часто применяются, особенно первый.
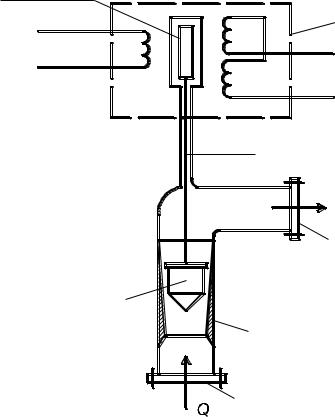
Для датчика расхода, работающего по переменному перепаду давления, в трубе необходимо установить сужающее устройство. Схема такого датчика представлена на рис. 2.12.
В этом случае измеренный расход Q по переменному перепаду давления можно представить зависимостью:
Q kF0 
 2 P1 P2 , м3/с
2 P1 P2 , м3/с
где k – коэффициент пропорциональности; F0 – площадь сужающего устройства;
P1 P2 P – перепад давления;– плотность жидкости.
Перемещение измерительной мембраны зависит от величины P , а величина P функционально отражает изменение расхода, поэтому напряжение uвых на выходе дифференциально-трансформаторного
преобразователя зависит от расхода Q: uвых K1 Q
где K1 – коэффициент пропорциональности.

|
43 |
Подвижный сердечник |
|
|
Дифференциально-трансформаторный |
|
преобразователь |
~ un = 12 B |
|
|
~ uвых |
|
Шток (тяга) |
Измерительная мембрана |
|
Импульсные трубки |
|
Q |
P2 |
P1 |
|
|
Суживающее |
|
устройство |
Рис. 2.12. Схематическая конструкция электрического бесшкального |
|
дифференциального манометра |
|
Устройство, представленное на рис. 2.12, называют электрическим бесшкальным дифференциальным манометром.
Совместно с электронным вторичным прибором группы КСД он применяется для измерения расхода жидкостей, газов не только в системахтеплоэнергетики, но и в системах водоснабжения и других, отличается высокой надёжностью и достаточной для практических целей точностью измерения, сечение трубопроводов при этом не ограничивается.
К устройствам, измеряющим расход по принципу постоянного перепада давления, можно отнести ротаметры и тахометрические расходомеры.
Схема ротаметра с электрическим выходным сигналом представлена на рис. 2.13.
Принцип действия ротаметра подробно освещён в литературе [6]. Отметим лишь, что перемещение поплавка ротаметра функционально зависит от расхода жидкости или газа.
А поскольку подвижный сердечник дифференциальнотрансформаторного преобразователя соединён тягой (штоком) с поплавком, то выходное напряжение пропорционально расходу:
uвых KQ ,
где K – коэффициент пропорциональности;
44 |
Q – расход жидкости или газа. |
Подвижный |
сердечник |
Дифференциально-трансформаторный |
преобразователь |
~ un = 12 B |
uвых |
Шток (тяга) |
Q |
Фланец |
Поплавок |
Корпус ротаметра |
Фланец |
Рис. 2.13. Схематическая конструкция ротаметра с электрическим выходным |
сигналом |
Ротаметр представляет собой механический прибор для измерения расхода по месту со шкалой, а дифференциально-трансформаторный преобразователь (как электрический датчик расхода) совместно с электронным прибором группы КСД составят электрический расходомер, который можно применить для автоматизации систем теплоэнергетики.
Ротаметры применяются для измерения расхода жидкостей или газов в трубопроводах диаметром от 20 до 100 мм.
Тахометрические расходомеры применяются сравнительно редко, так как вносят возмущения в поток движущей жидкости или газа, трудности связаны также с установкой и герметизацией датчика. Датчиком расходомера является тахогенератор с крыльчаткой, установленные в трубе. Электрическое напряжение тахогенератора пропорционально частоте вращения крыльчатки, а частота вращения пропорциональна расходу вещества. В результате электрическое напряжение тахогенератора можно использовать в системах управления устройств, связанных с измерением и регулированием расхода.

45
Индукционные расходомеры не вносят возмущение в поток жидкости или газа. Схематическое изображение такого расходомера представлено на рис. 2.14. Принцип действия индукционного расходомера освещён в литературе [6].
Труба в поперечном
сечении
Вторичный uвых электронный
прибор
N  S
S
Электроды датчика |
Магнитные |
расхода |
силовые линии |
Рис. 2.14. Схематическая конструкция индукционного расходомера
Индукционные расходомеры применяются для измерения расхода жидкостей, электропроводность которых сопоставима с электропроводностью воды. Диаметр трубы при этом не ограничивается.
Конструктивно электроды датчика расхода устанавливаются в диаметральных точках трубы. В другой плоскости под углом 90º на трубе устанавливается магнит и охватывает её. Постоянный магнит может быть применён для труб малого сечения, но из-за постепенной потери свойств постоянный магнит малопригоден для практических целей, поэтому в приборах его заменяют электромагнитом, в результате конструкция датчика сильно усложняется. Напряжение на электродах датчика пропорционально магнитной индукции B, диаметру трубы D и скорости потока v:
uвых B D v ,
а поскольку произведение D v определяет расход жидкости, то напряжение uвых пропорционально этому объёмному расходу (м3/с).
Отрезок трубы, где устанавливается датчик, должен быть изготовлен из магнитопрозрачного материала.
Индукционный датчик расхода совместно с вторичным прибором образуют расходомер. Выходное напряжение расходомера может быть использовано для автоматического управления процессом в той или иной системе ТГВ.
46
2.2.5.Датчики уровня
Краспространённым датчикам уровня можно отнести электродные датчики, ёмкостные датчики и поплавковые с дифференциальнотрансформаторным измерительным преобразователем.
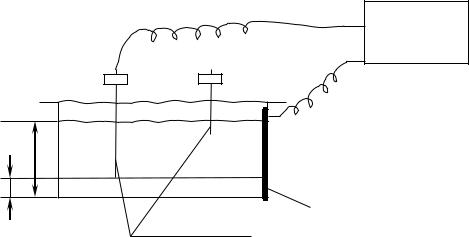
Принцип действия электродного датчика уровня основан на проводящих свойствах жидкости или сыпучего материала, заполняющих резервуар. Схематическое изображение электродного датчика представлено на рис. 2.15.
Вторичный
прибор
 измерения
измерения
LB
LH
Стальная полоса
Электроды
Рис. 2.15. Схематичное изображение электродного датчика
Электроды датчиков и стальная полоса выполнены из нержавеющей стали. Если электрод находится в жидкости, например в воде, то по цепи электрод – вода – стальная полоса течёт электрический ток. Вторичный прибор измеряет наличие тока и соответственно достижение жидкостью уровня LB или LH; если же электрод оказывается выше уровня жидкости, то цепь тока разрывается и прибор выдаёт, например световой сигнал или напряжение, характеризующее соответствующее состояние. Это напряжение используется в системе автоматического управления.
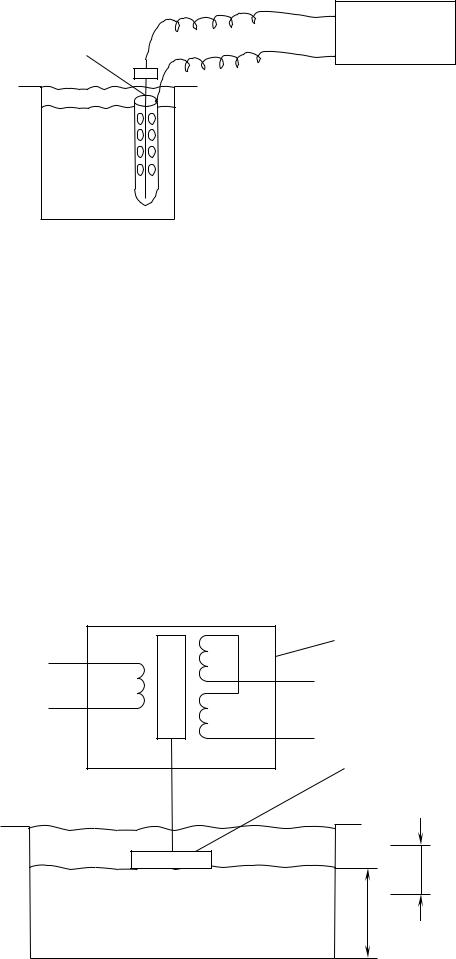
Ёмкостный датчик уровня может быть применён для измерения уровня жидкости или непроводящего сыпучего материала. Датчик состоит из электрода и гофрированной трубы, охватывающей электрод. Схематическое изображение датчика представлено на рис. 2.16.
|
47 |
|
Вторичный |
|
измерительный |
Электрод |
прибор |


 Труба
Труба
Рис. 2.16. Схематическое изображение ёмкостного датчика уровня
Труба и электрод составляют электрический конденсатор, емкость
которого C пропорциональна уровню L и диэлектрической постоянной :
C L .
Вторичный прибор измеряет ёмкость датчика, в результате измеряется уровень среды непрерывно с точностью до 1 мм, длина датчика может быть до 2,5 м.
Поплавковый датчик уровня с дифференциально-трансформаторным преобразователем (ДТП) применяется для измерения уровня (его отклонения) в сравнительно небольших пределах ± 20 мм (рис. 2.17).
Для измерения уровня воды в барабане котла применяется несколько похожий метод, но вместо поплавка используют дифманометр с ДТП. Дифманометр подсоединяется с помощью импульсных трубок к уравнительному сосуду, а уравнительный сосуд – к барабану котла. В результате осуществляется надёжное измерение уровня с точностью ± 1 мм.
ДТП
~ un
uвых
Поплавок
L
L
48
Рис. 2.17. Схематическое изображение поплавкового датчика уровня с ДТП
2.2.6. Датчик для измерения влажности в системах кондиционирования воздуха
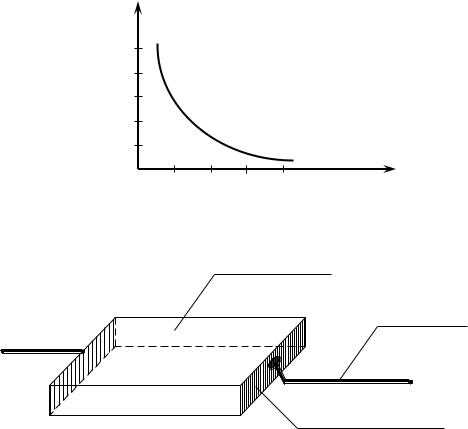
Влагочувствительным материалом датчика служит пористая керамика, полученная путём легирования хромата магния MgCr2O4 оксидом титана TiO2. В результате электрическое сопротивление R
керамики функционально зависит от влажности M окружающего воздуха:
R Ke M ,
где K и – коэффициенты пропорциональности, учитывающие размеры и свойства керамики.
Статическая характеристика датчика представлена на рис. 2.18. Конструкция датчика влажности представлена на рис. 2.19.
R, Ом |
|
|
|
107 |
|
|
|
106 |
|
|
|
105 |
|
|
|
104 |
|
|
|
103 |
|
|
|
0 |
50 |
100 |
M, % |
Рис. 2.18. Статическая характеристика датчика влажности
Пористая керамика
Медный провод
Металлизированная
поверхность
Рис. 2.19. Схематическая конструкция датчика влажности
В процессе производства датчика на торцевые поверхности керамической заготовки наносится в вакууме слой металла (медь или алюминий), к этому слою привариваются с торцов медные проводники для присоединения датчика в измерительную схему вторичного электронного прибора.

49
2.3. Задающие устройства и элементы сравнения
Задающим устройством (задатчиком) устанавливается заданное значение регулируемой величины или изменение этой величины по определённой программе.
Вэлектрических регуляторах в качестве задающих устройств применяются, например потенциометры, делители напряжения на постоянных резисторах. Задатчик может иметь линейную или круговую шкалу с перемещающей или вращающей рукояткой или клавишный переключатель. В программных регуляторах задающее устройство выполняется, например в виде профильного диска (копира). Если применяется управляющая вычислительная техника, то задание записывается на магнитном диске или в постоянном запоминающем устройстве (ПЗУ).
Впневматических и гидравлических регуляторах в качестве задающих устройств применяются, например регулировочные винты со стрелкой и шкалой: при вращении винта меняется, например сила сжатия пружины или усилие на мембрану, изменяется сечение игольчатого клапана.
Вэлементе сравнения в соответствии с функциональной схемой САР происходит сравнение сигнала задания и сигнала, пропорционального текущему значению регулируемой величины. Результат сравнения – получение сигнала, пропорционального отклонению регулируемой величины. В электрических регуляторах в качестве элементов сравнения применяют, например сумматоры напряжения на резисторах, мостовые измерительные схемы.
Впневматических регуляторах функцию элемента сравнения выполняет, например узел «сопло – заслонка», мембранный блок, в гидравлических – золотниковые устройства и другие.
2.4. Усилители
Первичные преобразователи (датчики) автоматических систем контроля, регулирования и управления вырабатывают, как правило, небольшой по величине сигнал. Во многих случаях мощность этого сигнала составляет сотые – тысячные доли ватта, и её недостаточно для приведения в действие последующих звеньев. Для усиления сигнала первичного преобразователя по мощности в автоматических системах применяют усилители.
Усилители характеризуются коэффициентом усиления по мощности
K:
K Pвых , Pвх
50
где Pвых – мощность выходного сигнала усилителя; Рвх – мощность сигнала на входе усилителя.
Вусилителях для усиления входного сигнала и получения мощности выходного сигнала, достаточной для приведения в действие последующих звеньев, затрачивается энергия извне.
По виду потребляемой энергии усилители могут быть электрическими, пневматическими и гидравлическими. В зависимости от статической характеристики различают усилители релейного и непрерывного действия. К усилителям релейного действия относятся электрические, пневматические и гидравлические реле. В этих усилителях выходная величина измеряется скачком при достижении входной величины порога срабатывания реле.
Влинейных усилителях непрерывного действия наблюдается пропорциональная зависимость между изменением входной и выходной величины.
Усилители, потребляющие электрическую энергию, могут быть магнитными, электронными, электромагнитными.
Электронные усилители выполнены с применением полупроводниковых приборов (транзисторов, интегральных микросхем) и отличаются высокой надёжностью, малыми габаритами. Большим достоинством электронных усилителей является высокая чувствительность на входе, поэтому эти усилители применяются с датчиками, имеющими очень малую мощность сигнала.
Пневматические усилители в системах автоматики для усиления сигнала по мощности в зависимости от принципа действия подразделяются на поршневые, мембранные и струйные.
Гидравлические усилители в зависимости от принципа действия подразделяются на золотниковые, дроссельные и струйные.
2.5.Исполнительные механизмы и регулирующие органы
Исполнительный механизм автоматической системы – это устройство, приводящее в движение различные регулирующие органы (клапаны, дроссельные заслонки, задвижки, шиберы, краны и др.). Чтобы привести в движение исполнительный механизм, требуются затраты энергии извне. В зависимости от вида потребляемой энергии исполнительные механизмы могут быть электрическими, гидравлическими и пневматическими.
Электрические исполнительные механизмы применяются в комплекте с электрическими и электронными регуляторами. В этих исполнительных механизмах применяют двух- и трёхфазные асинхронные электродвигатели, тяговые электромагниты.
Схематическая конструкция тягового электромагнита представлена на рис. 2.20.