

9481
.pdf100
будет иметь нулевую скорость.
Примем точку А за полюс. Тогда по теореме о сложении скоростей скорость точки Р будет равна:
|
|
|
|
= |
+ . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Заметим что: |
|
|
|
|
|
|
|
|
||
|
1. Скорость перпендикулярна отрезку РА и направлена в |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
сторону противоположную скорости ; |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
= | | = |
|
2. Модули скоростей |
и равны, поскольку |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Отсюда |
ясно, что + |
|
|
|
|
||||
|
|
= 0, и точка Р действтельно является |
||||||||
|
|
|
|
|
|
|
|
|
|
|
мгновенным центром скоростей.
ПРИМЕЧАНИЯ:
1.Положение МЦС на движущейся фигуре не является неизменным, в процессе движения его положение постоянно меняется:
2.МЦС может находиться вне тела;
3.Если угловая скорость тела в данный момент равна нулю, то МЦС располагается в бесконечности. В этом случае скорости всех точек тела одинаковы. Движение тела в данный момент времени называют мгновенно поступательным, в отличие от поступательного движения, при котором = 0 в любой момент времени.
Выберем в качестве полюса МЦС.
Тогда скорость произвольной точки М будет равна:
= + = Р.
ВЫВОД:
скорость произвольной точки М плоской фигуры равняется скорости, которую она имеет в относительном вращении вокруг МЦС.
Следовательно:
1.скорость направлена перпендикулярно отрезку РМ в сторону вращения;
2.модуль ее в соответствии с формулой (3.3) равен
|
= |
. |
(3.5) |
|
Р |
|
|
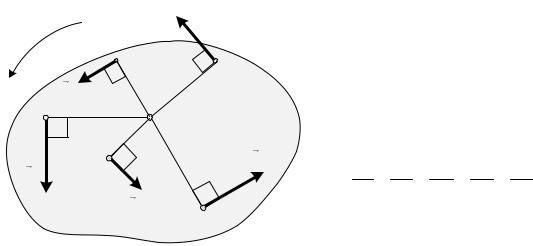
Картина распределения скоростей точек движущейся плоской фигуры имеет вид, показанный на рис. 3.7.
101
|
|
vD |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
E |
|
|
|
|
|
|
|
|
|
|
vE |
D |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
P |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
900 |
vC |
|
|
|
|
|
|
|
|
|
vA |
|
vA |
|
vB |
|
vC |
|
vD |
|
vE |
|
B |
|
|
|
|
|
||||||
|
|
vB |
PA |
PB |
PC |
PD |
PE |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
|
|
|
|
Рис. 3.7
3.4НАХОЖДЕНИЕ МГНОВЕННОГО ЦЕНТРА СКОРОСТЕЙ
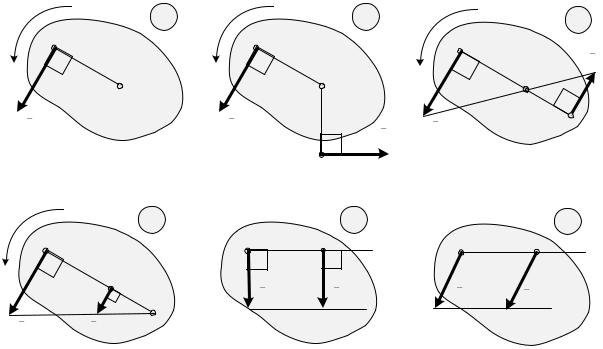
Рассмотрим несколько простых приемов, позволяющих в процессе решения задач определить местоположение МЦС.
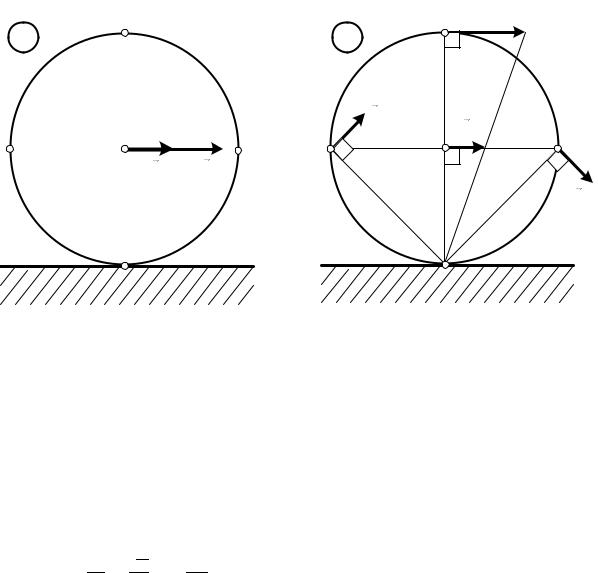
1.Известна угловая скорость фигуры и скорость любой ее точки А
(рис. 3.8,а).
Для определения МЦС надо:
Повернув вектор скорости , на 900 в сторону вращения тела, найти направление, на котором лежит МЦС;
На найденном направлении отложить отрезок AР равный =
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и получить положение точки Р, которая является |
|
|||||||||
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
мгновенным центром скоростей. |
|
|
||||||||||
2. |
Известны направления скоростей двух точек плоской фигуры и |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и эти скорости не параллельны друг другу (рис. 3.8, б). |
|
||||||||||||
|
Для определения МЦС надо из точек А и В восстановить |
|
||||||||||||
|
перпендикуляры к направлению скоростей до точки их пересечения P, |
|||||||||||||
|
которая и будет точкой МЦС. |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
При этом |
|
|
|
= |
|
|
= . |
|
|
||||
|
|
|
| | |
|
| | |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
||||
3. |
Cкорости двух точек плоской фигуры |
и параллельны друг |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
другу и перпендикулярны отрезку АВ. |
|
|
|||||||||||
|
МЦС находится из условия, что модули скоростей точек А и В |
|
||||||||||||
|
пропорциональны расстояниям от этих точек до МЦС: |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
= |
|
|
|
= . |
|
|
|
|
|
|
|
| | |
| | |
|
|
||||||
|
|
|
|
|
|
|
|
|
||||||
Возможны два варианта:
102
МЦС находится между точками А и В, когда скорости направлены в разные стороны (рис.3.8, в);
МЦС находится за пределами отрезка АВ, когда скорости не равны и направлены в одну сторону (рис. 3.8, г).
а |
б |
в |
|
|
A |
|
|
A |
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
vB |
|
P |
|
P |
|
|
P |
vA |
|
vA |
|
vB |
v |
A |
|
|
|
|
|
|
|
|
|
|
B |
|
|
|
|
|
г |
|
A |
|
|
A |
|
|
B |
|
|
|
vA |
|
|
|
P |
|
|
|
|
|
vA |
vB |
|
0 |
|
|
|
д
B
vB
е
A |
B |
|
|
||
vA |
v |
B |
|
|
|
0 |
|
|
Рис. 3.8
4. Cкорости двух точек плоской фигуры |
и |
|
равны по модулю и |
|
|
|
параллельны друг другу. При этом они могут быть перпендикулярны или неперпендикулярны отрезку АВ.
МЦС в этом случае располагается в бесконечности. Скорости всех точек тела одинаковы. Движение тела является мгновенно поступательным и = 0.
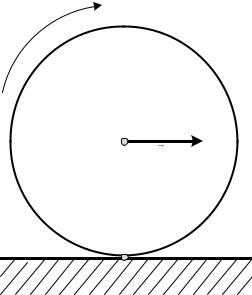
5.При качении тела по неподвижной поверхности (Рис. 3.9) скорости соприкасающихся точек равны в том случае, если отсутствует проскальзывание между телами. Тогда МЦС находится в точке
соприкосновения тела с поверхностью.
103
O
vO
P
Рис. 3.9
3.5ТЕОРЕМА О СЛОЖЕНИИ УСКОРЕНИЙ
ТЕОРЕМА
Ускорение точки плоской фигуры равно векторной сумме ускорения полюса и ускорения, которое имеет эта точка в относительном вращении фигуры вокруг полюса:
|
|
= |
+ |
|
. |
(3.6) |
|
|
|
|
|
|
|
Доказательство |
|
|
|
|
|
|
По теореме о сложении скоростей имеем: |
|
|||||
|
|
= |
+ |
. |
|
|
|
|
Р |
Р |
|
|
|
Продифференцируем это равенство по времени. Получим: |
|
|||||
|
̇ |
= ̇+ ̇ |
, |
|
||
|
|
С |
С |
|
|
|
где ̇ |
– ускорение точки М, |
|
̇ − ускорение точки С, |
|
||
|
|
|
|
|
С |
|
̇ |
− ускорение точки М в системе отсчета, связанной с точкой С, то |
|||||
С
есть ее ускорение во вращении фигуры вокруг точки С (вокруг полюса).
Теорема доказана.
104
|
a MC |
a MC |
|
|
|
C |
anMC |
M |
Рис. 3.10
Ускорение определяется по правилам вращательного движения, то есть равно сумме вращательного и центростремительного ускорений (рис.
3.10):
|
|
= |
|
+ |
|
. |
(3.7) |
|
|
|
|
|
|||
Тогда полное ускорение точки М будет равно: |
|
||||||
|
= |
+ |
+ . |
|
|||
|
|
|
|
|
|
|
|
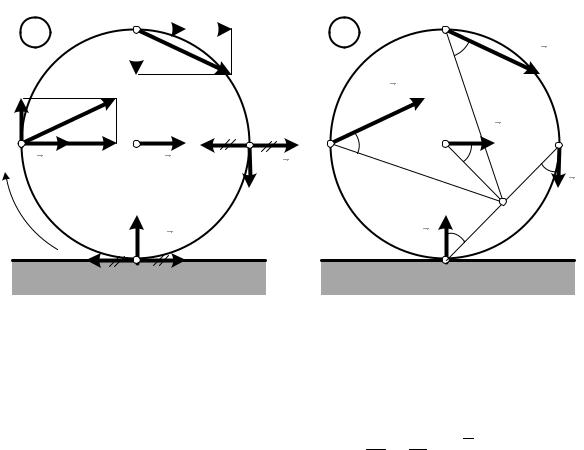
3.6СКОРОСТИ И УСКОРЕНИЯ ТОЧЕК КОЛЕСА
ПРИМЕР
Пусть колесо радиусом R=1м катится без скольжения по горизонтальной плоскости. Скорость центра колеса 0 = 1 мс , а ускорение
центра колеса по направлению совпадает со скоростью и равно 0 = 1 см2.
Определить скорости и ускорения точек А, В, С, Р, расположенных на ободе колеса (рис. 3.11).
Решение
1.Определение скоростей
МЦС колеса – точка Р. Относительно точки Р колесо вращается по часовой стрелке. Соединим точку Р с точками А, В, С и покажем направления скоростей в сторону вращения по перпендикуляру к отрезкам АР, ВР, СР.
Угловую скорость колеса получим из формулы, которая связывает угловую скорость со скоростью центра колеса: 0 = ∙ , из которой
получается, что = 0 = 1 1.
105
B |
B |
vB |
|
||
а |
б |
|
|
|
|
|
vA |
|
vO |
|
A |
O |
C |
A |
|
O |
C |
|
|
|
|
|
||||
|
|
|
|
|
|
||
|
aO |
vO |
|
|
|
|
|
vC
P P
|
|
|
|
|
|
|
|
|
|
|
Рис. 3.11 |
|
|
|
|
|
|
|
|
|
|
||
|
Модули скоростей получим по формуле Эйлера |
|
= (3.3): |
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
м |
|
|
|
м |
|
|
|
|
м |
|
||||||
|
|
|
|
|
|
|
|
|
= ∙ 2 = 2 |
; |
|
|
|
|
|
|
|
. |
|||||
|
|
= ∙ √2 |
= √2 |
; |
|
|
|
= ∙ √2 = √2 |
|||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
с |
|
|
|
с |
|
|
|
|
|
|
|
с |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
2.Определение ускорений
Расстояние от точки О до МЦС (точки Р) всегда постоянно. Кроме того точка О движется прямолинейно. В этом случае угловое ускорение можно найти следующим образом:
|
|
|
|
̇ |
|
|
|
||
= ̇= |
|
( |
|
) = |
|
= |
|
. |
|
|
|
|
|
|
|||||
|
|
|
|
|
|||||
То есть в данный момент времени
м
= = 11см2 = 1 радс .
Выберем в качестве полюса центр колеса (точку О) и используем для определения ускорения произвольной точки М теорему о сложении ускорений:
|
= |
+ |
= |
+ |
+ . |
|
|
|
|
|
|
Вращательные ускорения точек A, B, C, P во вращении колеса относительно полюса О по модулю будут одинаковы и направлены перпендикулярно к соответствующему радиусу в сторону углового ускорения:
|
= |
= |
= |
= ∙ = 1 |
1 |
∙ 1м = 1 |
м |
. |
2 |
|
|||||||
|
|
|
|
|
|
2 |
||
Нормальные ускорения точек A, B, C, P во вращении колеса относительно полюса О по модулю будут одинаковы и направлены к центру колеса:
|
= |
= |
= |
= 2 ∙ = 12 |
1 |
∙ 1м = 1 |
м |
. |
2 |
|
|||||||
|
|
|
|
|
|
2 |
||
Суммируя в каждой точке три вектора ускорения по формуле
106
|
|
= |
|
+ |
|
+ |
, получим, что |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
м |
|
|
|
|
|
|
|
|
|
|
|
м |
. |
||
|
= |
|
= 1 |
|
|
и |
|
|
= = √12 |
+ 22 |
= √5 |
||||||||||
|
с2 |
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
А В |
|
|
|
|
с2 |
||||
|
|
|
|
|
B |
|
aO |
aBO |
|
B |
|
|
|
||||||||
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
an |
|
|
|
|
|
|
|
aA |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
AO |
|
|
|
|
|
BO |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
O |
|
C |
A |
|
O |
|
|
|
|
|
|
||
aO |
aAOn |
aO |
an |
|
a |
|
|
|
|
|
CO |
|
O |
|
|
|
n |
aCO |
|
aPO |
|
|
|
|
a |
a |
aP |
PO |
O |
|
aB
aO C
aC
Q |
aQ 0
P |
|
P |
Рис. 3.12
Если на середине отрезка СР отметить точку Q, то можно заметить, что:Ускорения в точках, расположенных на одинаковых расстояниях от
точки Q (точках Р, О, С) одинаковы по величине;
Ускорения в точках, расположенных на разных расстояниях от точки Q
пропорциональны расстояниям до этих точек ( = = √5);
Ускорения в точках A, B, C, P направлены таким образом, что
составляют одинаковый угол с отрезками, соединяющими эти точки с точкой Q;
Ускорение в самой точке Q при этом равно нулю.
Точка тела Q, ускорение которой в данный момент равно нулю, называется
мгновенным центром ускорений.
Существуют правила, по которым всегда можно найти положение мгновенного центра ускорений (МЦУ), после чего определение ускорение других точек тела сильно упрощается.
107
ПРИМЕРЫ РЕШЕНИЯ ЗАДАЧ ПО СТАТИКЕ
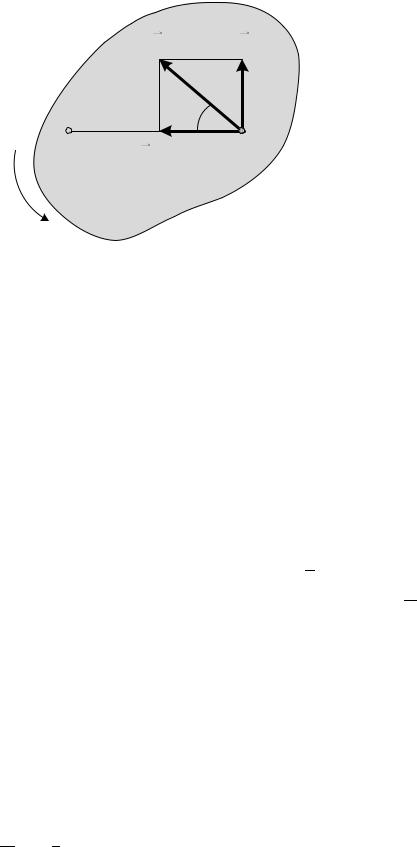
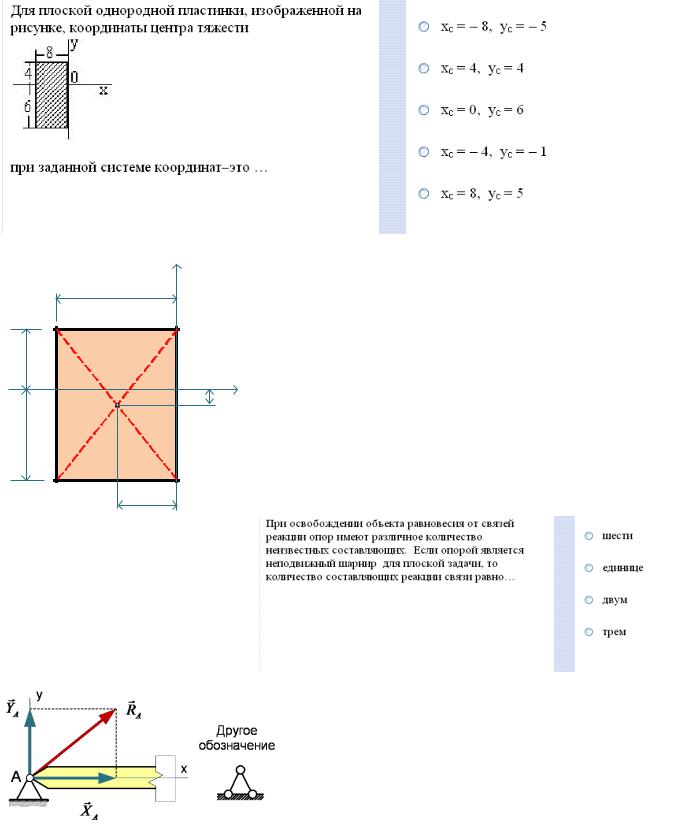
ЗАДАЧА 1
Решение |
|
|
|
|
y |
|
|
|
|
8 |
|
Центр тяжести такой пластины |
||
|
|
находится на пересечении диагоналей |
||
|
|
прямоугольника, поэтому в показанной на |
||
4 |
|
рисунке системе координат координаты |
||
x |
центра тяжести пластины будут равны |
|||
O |
||||
|
|
xC 4, |
yC 1. |
|
|
yC |
Ответ: |
Верным является четвертый ответ. |
|
6 |
|
|||
|
|
|
||
xC |
|
ЗАДАЧА 2 |
||
|
|
|||
Ответ: Верным является третий ответ.
108
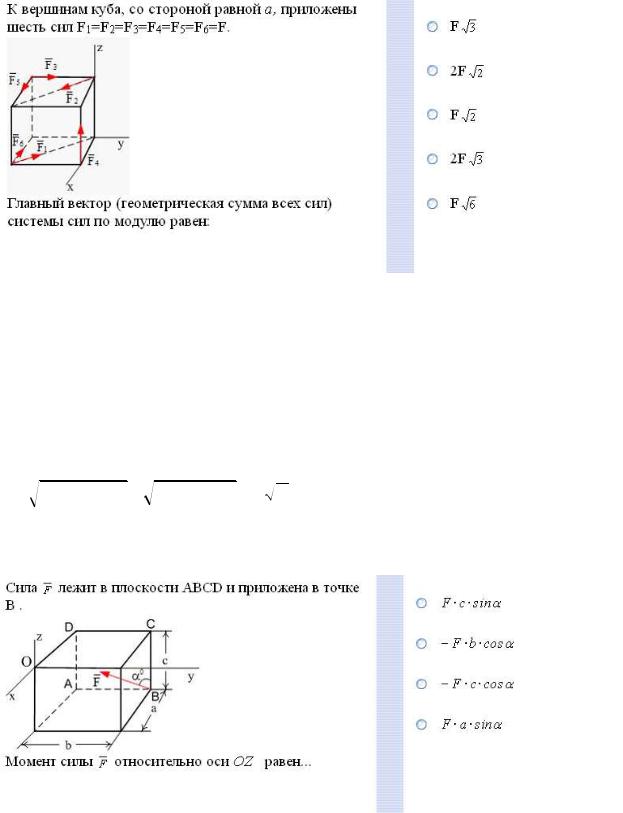
ЗАДАЧА 3
Решение
Определяем проекции главного вектора на координатные оси:
n
Rx Xi F1 cos 45 F2 cos 45 F5 F6 0;
i 1
n
Ry Yi F1 cos 45 F2 cos 45 F3 F;
i 1
n
Rz Zi F4 F .
i 1
Определяем модуль главного вектора:
R 
 R2x R2y R2z
R2x R2y R2z 
 02 F 2 F 2 F
02 F 2 F 2 F 
 2.
2.
Ответ: Верным является третий ответ.
ЗАДАЧА 4
Решение
109
Спроектируем силу на плоскость перпендикулярную указанной оси. Умножив модуль полученной проекции на плечо, получим модуль момента. Знак момента укажем, руководствуясь правилом правого винта.
M Z Fa sin .
Ответ: Верным является четвертый ответ.
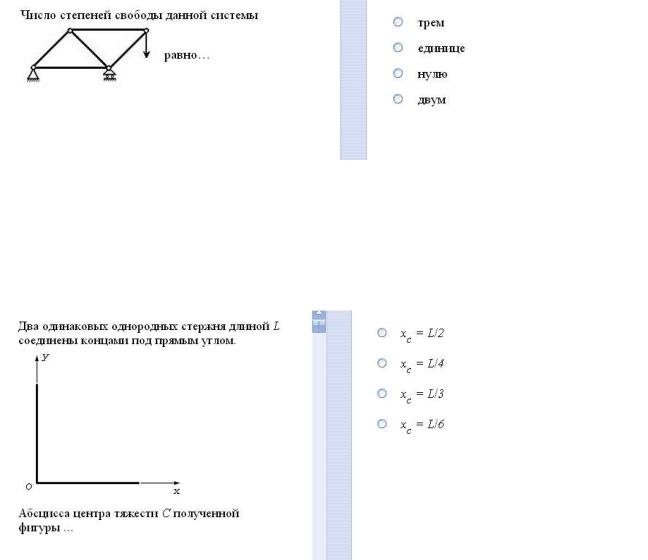
ЗАДАЧА 5
Решение
Система, изображенная на рисунке, представляет собой геометрически неизменяемую ферму (диск), которая закреплена на опорах неподвижно. Любые формы движения для нее невозможны.
Ответ: Верным является третий ответ.
ЗАДАЧА 6
Решение
Координату xС центра тяжести ломаного стержня определим по формуле:
|
n |
|
|
|
|
|
L |
|
|
|
|
|
|
xi Li |
|
|
|
|
0 L |
L |
|
|
|||
|
|
x1L1 |
x2 L2 |
|
2 |
|
L |
|
||||
x |
i 1 |
|
|
|
|
|
|
. |
||||
n |
|
|
|
|
|
|
|
|||||
C |
|
L1 |
L2 |
L L |
|
|
4 |
|
||||
|
Li |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
i 1
Ответ: Верным является второй ответ.