

9368
.pdfЛекция 53. Тройной интеграл в сферических координатах. Приложения к механике
53.1. Вычисление тройного интеграла в сферических координатах.
Чтобы ввести сферические координаты в трёхмерном пространстве,
рассмотрим снова плоскость α и перпендикулярную |
ей ось |
L . На |
|||
плоскости α введём ось l . Тогда сферические координаты (ρ, ϕ, θ) |
точки |
||||
P будут представлять собой соответственно её расстояние ρ от начала |
|||||
координат (длина радиус– вектора точки |
P ), |
угол |
ϕ между проекцией |
||
OP ′ радиус-вектора точки P на плоскость α и осью l , а |
также угол θ |
||||
между радиус-вектором OP и осью |
L |
(рис. |
53.1). |
Координатная |
|
поверхность ρ = const является сферой, что объясняет название координат. Для описания всех точек в пространстве достаточно следующих
промежутков изменения координат: 0 ≤ ρ < ∞, 0 ≤ θ ≤ π, 0 ≤ ϕ < 2π . Введём декартову систему координат, совместив ось Ox с осью l , а
плоскость xOу декартовой системы – с плоскостью α (рис. 53.1). Декартовы координаты точки P обозначим (x, y, z) , тогда координаты её проекции P′ на плоскость xOу приобретут значения (x, y, 0) . Поскольку расстояние r = OP′ и угол ϕ являются полярными координатами точки
P′ , то x = r cos ϕ , y = r sin ϕ.
Рис. 53.1
Учитывая, что OP′ = ρsinθ и z = ρcosθ, получим связь сферических и декартовых координат в виде
x = ρsin θcos ϕ |
|
|
|
|
|
y = ρsin θsin ϕ |
(53.1) |
|
|
||
|
||
z = ρcosθ |
|
Пусть для примера поверхность задана в декартовых координатах уравнением
(x 2 + y 2 + z 2 )2 = a 2 (x 2 + y 2 ).
По такому уравнению представить вид поверхности весьма непросто. Перейдём к сферическим координатам, пользуясь соотношениями (53.1)
|
ρ2 sin2 |
θcos2 |
ϕ+ ρ2 sin2 θsin2 ϕ+ ρ2 cos2 θ 2 |
= |
|
|
|
|
|
= a2 (ρ2 sin2 θcos2 ϕ+ρ2 sin2 θsin2 ϕ) .
После очевидных преобразований уравнение упрощается
ρ4 (sin2 θ + cos2 θ)2 = a2ρ2 sin2 θ ,
что дает ρ2 = a2 sin2 θ или, окончательно, ρ = a sin θ .
Теперь можно представить вид поверхности. Во-первых, ясно, что она имеет одинаковые сечения плоскостями ϕ = const . Во-вторых, можно определить вид этих сечений. Для этого перейдём в плоскости yOz к
декартовым координатам по формулам, которые получаются из (53.1), если
ϕ = π 2
2
z = ρcosθy = ρsin θ .
Уравнение сечения рассмотрим в виде ρ2 = aρsinθ, что дает в координатах ( y, z) уравнение y2 +z2 =ay или после выделения полного квадрата
2
y − a2
2
+ z2 = a .2
Видим, что сечение это является окружностью радиуса a .
2
Пришли к тому, что исходная поверхность представляет собой тор, т.е. закрученную вокруг оси Oz окружность, закрепленную в начале координат (половина поверхности изображена на рисунке 53.2).
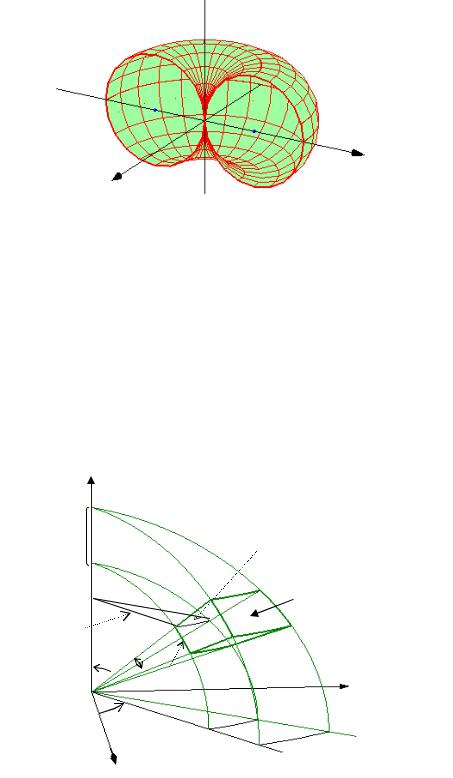
Рис.53.2
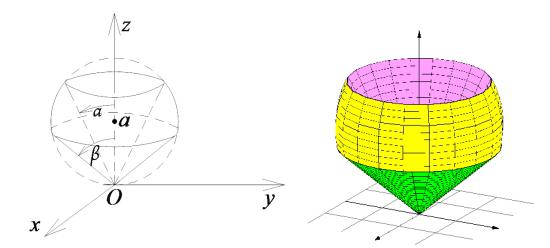
Чтобы найти элементы объёма в сферических координатах, построим поверхности семейств ρ = const (сферы), θ = const (конические поверхности с вершиной в начале координат) и ϕ = const (полуплоскости, проходящие через ось Oz ). Рассмотрим один из элементов Ωi ,
ограниченный сферами радиусов ρ |
и ρ + dρ , конусами растворов θ и |
θ + dθ , а также полуплоскостями, |
проведёнными через ось Oz , следы |
которых в плоскости xOу имеют полярные лучи ϕ и ϕ + d ϕ (рис. 53.3).
z
dρ
ρsinθdϕ
ρ
Ωi
ρsinθ
θdθ
ρdθ |
|
y |
ϕ |
ρ |
|
|
dϕ |
|
x |
|
|
|
|
Рис. 53.3
Представив подобласть Ωi как прямоугольный параллелепипед со сторонами dρ , ρdθ и ρsinθdϕ, получим элементарный объём в виде
dV = ρ2 sin θ dρdϕdθ. Поэтому формула перехода в тройном интеграле от декартовых координат к сферическим приобретает вид
∫∫∫ f (x, y,z)dxdydz =∫∫∫ f (ρsinθcosϕ,ρsinθsinϕ,ρcosθ)ρ2sinθdρdϕdθ . |
|
Ω |
Ω |
Итак, при переходе в тройном интеграле от декартовых к сферическим координатам подынтегральная функция должна быть выражена через
переменные ρ , ϕ и θ по формулам (53.1), а также умножена на ρ2 sinθ. Сферические координаты используем для нахождения объёма тела
Ω , ограниченного сферой x2 + y2 + z2 = 2az и двумя коническими
поверхностями x2 + y2 = z2tg2α |
и x2 + y2 = z2tg2β, если 0 < α < β < π |
(рис. 53.4). |
2 |
|
Рис. 53.4
Пользуясь формулами, связывающими декартовы и сферические координаты, запишем уравнение исходной сферы с центром в точке (0,0,a)
и радиуса a в виде
ρ2 sin2 θcos2 ϕ+ρ2 sin2 θsin2 ϕ+ρ2 cos2 θ = 2aρcosθ,
что дает после преобразований ρ = 2acosθ.
Теперь можно задать область Ω в сферических координатах условиями
0≤ρ≤2acosθ, 0≤ϕ≤ 2π, α≤θ≤β.
Тогда объем находится следующим образом:
|
β |
2π 2acosθ |
|
V = ∫∫∫ρ2 sinθdϕdρdθ= ∫dθ ∫ dϕ |
∫ ρ2 sinθdρ= |
||
Ω |
α |
0 |
0 |
β |
2π |
8a3 |
|
θdϕ = |
4πa3 |
|
|
|
= ∫dθ ∫ sinθ |
3 |
4 |
4 |
β) . |
||||
3 |
cos |
3 |
(cos |
α−cos |
||||
α |
0 |
|
|
|
|
|
|
|
Заметим, что сферические и цилиндрические координаты являются ортогональными координатами (их координатные линии пересекаются под прямым углом). Иногда применяют и неортогональные координаты, но мы оставим это за рамками нашего рассмотрения.
53.2. Статические моменты, координаты центра тяжести, моменты инерции пространственных тел. Если пространственную область Ω рассматривать как материальное тело, то с помощью тройного интеграла можно находить для него координаты центра тяжести и моменты инерции относительно некоторой плоскости, точки или оси. Формулу нахождения массы пространственного тела как интеграла от объёмной плотности мы уже получили.
Пусть ограниченное материальное тело Ω в пространстве имеет объёмную плотность, заданную функцией γ = γ(x, y, z) . Для определения
координат центра тяжести плоских областей использовались статические моменты относительно осей координат. Для пространственной области
следует рассматривать |
статические |
моменты M yoz , M xoz ,M xoy |
относительно соответствующих координатных плоскостей. |
||
Будем рассуждать |
так же, как |
при нахождении массы |
пространственного тела. Во-первых, разобьём тело Ω на n тел. В пределах каждого тела Ωi будем считать объёмную плотность постоянной и
равной её значению γ(xi , yi , zi ) в некоторой точке Pi (xi , yi , zi ) . Если далее считать, что вся масса Mi подобласти Ωi сосредоточена в точке Pi (xi , yi , zi ) , то можно рассматривать тело Ω как систему материальных точек. Тогда для статического момента относительно координатной
плоскости |
yOz получим приближённое значение, выраженное через |
|
объём V |
части пространства, занимаемого телом Ω |
i |
i |
|
|
n
Myoz ≈∑xi
i=1
n
Mi ≈∑xi γ(xi,yi,zi) Vi .
i=1
При диаметре разбиения, стремящемся к нулю, интегральные суммы перейдут в пределе в двойной интеграл
M yoz = ∫∫∫ xγ(x, y, z)dxdydz .
Ω
Аналогично получа ются статические |
моменты |
относительно других |
|||||||
координатных плоск остей. |
С помощью этих |
статических моментов |
|||||||
вычисляются координаты центра тяжести тела |
Ω по формулам |
||||||||
x = |
Myoz |
|
y = |
M |
|
= |
Mxoy |
|
|
|
, |
xoz |
, |
z |
|
. |
|||
|
|
|
|||||||
c |
M |
|
c |
M |
c |
|
M |
|
|
|
|
|
|
|
|
||||
При постоянной объёмной плотности эти формулы приобретают вид
xc = |
1 |
∫∫∫xdxdydz, |
yc = |
1 |
∫∫∫ydxdydz, |
zc = |
1 |
∫∫∫zdxdydz . |
||||
|
|
|
||||||||||
V |
Ω |
V |
Ω |
|
|
|
V |
Ω |
||||
|
|
|
|
|
|
|
|
|
||||
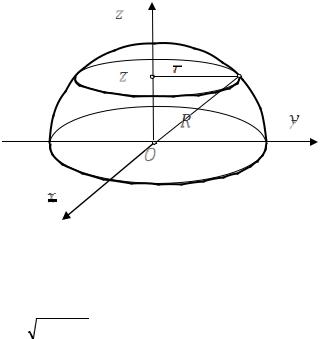
Найдем для примера центр тяжести однородного поллушара радиуса R |
||||||||||||
с центром в начале координат |
(рис. 53.5). |
Из соображений симметрии |
||||||||||
ясно, что две коордиинаты центра тяжести |
|
xc и yc |
равны 0 . Чтобы |
|||||||||
вычислить zc , записываем соответствующую формулу |
|
|||||||||||
|
|
|
|
|
|
2πR3 |
∫∫∫ |
|
|
|
|
|
|
|
|
zc = |
|
3 |
|
zdxdydz . |
|
||||
|
|
|
|
|
|
|
||||||
Ω
Рис. 53.5
Учитывая, что сечениие D полушара |
плоскостью z =const представляет |
||
|
z |
|
|
|
|
(рис. |
53.5) с площадьюю S(z) =π(R2 −z2 ) , |
собой круг радиуса |
R2 −z2 |
||
получим |
|
|
|
|
R |
|
|
R |
R |
− z2)dz = πR4 . |
∫∫∫ zdxdydz =∫ zdz ∫∫ dxdy = ∫ zS(z)dz = ∫ zπ(R2 |
||||||
Ω |
0 |
Dz |
|
0 |
0 |
4 |
|
|
|||||
Окончательно найдем |
zc = |
3 |
×πR4 |
= 3 R . |
|
|
|
|
|||||
|
|
2πR3 |
4 |
8 |
|
|
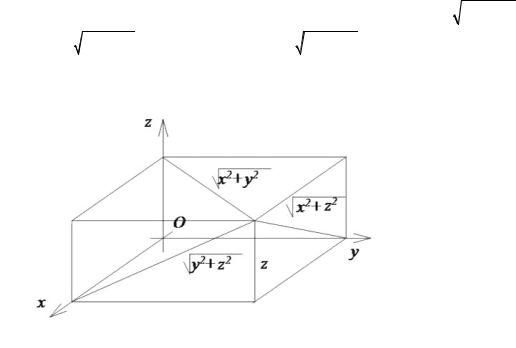
Моменты инерции относительно осей, точек и координатных плоскостей для пространственных тел определяются аналогично моментам инерции плоских фигур: интегрируется произведение плотности на квадрат расстояния до оси, точки или плоскости. Нужно учесть при этом,
|
|
|
|
до оси Ox равно |
|
|
|
что расстояние от произвольной точки |
P(x, y, z) |
y2 + z2 |
|||||
|
|
|
|
|
, до плоскости xOу |
||
, до оси Oy равно |
x2 + z2 |
, до оси Oz |
равно |
x2 + y2 |
|||
равно z и так далее (рис. 53.6). |
|
|
|
|
|
||
Рис. 53.6
Поэтому момент инерции относительно оси Ox записывается в виде
Ix = ∫∫∫( y2 + z2)γ(x, y,z)dxdydz ,
Ω
момент инерции относительно координатной плоскости xOу
Ixoy = ∫∫∫ z2γ(x, y,z)dxdydz ,
Ω
аналогично – для других осей координат и координатных плоскостей. Момент инерции относительно начала координат равен
I0 = Ixoy + Ixoz + I yoz .
Записанные формулы упрощаются в случае однородных пространственных тел с постоянной объёмной плотностью.
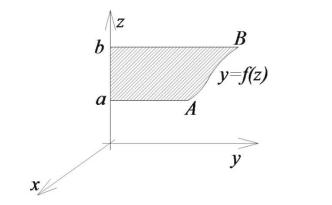
Найдем для примера момент инерции тела, полученного в результате вращения вокруг оси Oz криволинейной трапеции aABb (рис. 53.7) относительно его оси симметрии.
Рис. 53.7
Здесь |
y = f (z) – неотрицательная и непрерывная |
на |
отрезке |
a,b |
|||
|
|
|
|
|
|
|
|
функция. Считаем объёмную плотность постоянной |
γ(x, y, z) ≡ γ |
и |
|||||
используем выписанную ранее формулу в виде |
|
|
|
|
|||
|
I z = γ∫∫∫ ( x2 + y 2 )dxdydz . |
|
|
|
|
||
|
Ω |
|
|
|
|
|
|
Вычисляем тройной интеграл |
|
|
|
|
|
|
|
|
b |
|
|
|
|
|
|
|
I z = γ∫ d z ∫∫ ( x 2 |
+ y 2 )d xd y , |
|
|
|
|
|
|
a |
D z |
|
|
|
|
|
где D |
– сечение исходного тела вращения плоскостью z = const , которое |
||||||
z |
|
|
|
|
|
|
|
представляет собой круг радиуса |
y(z) . |
Если D - |
круг радиуса |
|
R с |
||
центром в начале координат, то, переходя к полярным координатам, можно найти
|
2 π |
R |
2π r4 |
|
R |
|||
∫∫( x 2 |
+ y 2 )dxdy = ∫ d ϕ ∫(r 2 cos2 ϕ + r 2 sin 2 ϕ)rdr = |
|
dϕ= |
πR4 |
|
|||
∫ |
4 |
|
|
|||||
D |
0 |
0 |
|
2 . |
||||
|
|
|
0 |
|
|
0 |
|
|
|
|
|
|
|
||||
Тогда для тела вращения вместо R достаточно подставить его выражение как функцию y(z)

I = γ |
b |
|
y 4 ( z ) |
d z = |
πγ |
b |
|
|
|
π |
y 4 ( z )d z |
|
|||||
∫ |
|
|
∫ |
. |
||||
z |
2 |
2 |
|
|||||
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
a |
|
|
Полученную формулу удобно использовать для вычиисления моментов инерции конкретных тел вращения. Например, для конуса радиуса R и высоты H с постоянной плотностью γ(x, y, z) ≡ γ (см. рис. 53.8) имеем
Рис. 53.8
|
|
π γ H |
R |
|
4 |
πγR 4 |
3 M R 2 |
|||||
I z |
= |
|
∫ |
|
|
z |
d z = |
|
H = |
|
, |
|
2 |
H |
1 0 |
1 0 |
|||||||||
|
|
|
|
|
|
|
||||||
0
так как его масса |
|
|
|
M = γ |
πR 2 H |
. |
|
3 |
|||
|
|
Раздел 10. Криволинейные интегралы
Лекция 54. Криволинейный интеграл 1-го рода (по длине дуги)
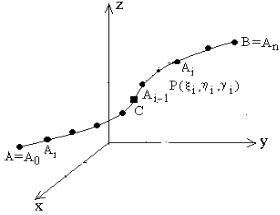
54.1. Определение. К понятию криволинейного интеграла 1-ого рода приводит вычислительная конструкция, возникающая, например, при попытке точного решения задачи об определении массы неоднородной материальной линии. Задача формулируется так. Пусть в каждой точке P(x, y, z) линии AB в пространстве определена плотность ρ( x, y , z )
(рис. 54.1). Требуется найти массу этой линии.
Рис. 54.1
Под плотностью |
массы |
вдоль |
кривой |
AB |
в точке P0 (x0 , y0 , z0 ) |
||
понимается величина |
ρ ( x , y , z |
) |
= lim |
m , где |
l – длина отрезка |
||
|
0 0 |
0 |
0 |
l → 0 |
l |
|
|
|
|
|
|
|
|
|
|
кривой, содержащего точку P0(x0, y0, z0) , а |
m – |
масса этого отрезка. Если |
|||||
плотность в каждой точке линии одинакова и равна ρ0 , то масса
вычисляется по формуле |
M =ρ0L, где |
L – длина кривой от точки |
A до |
||||||||||||
точки |
B . Если же плотность вдоль линии изменяется, |
то эта формула |
|||||||||||||
неприменима. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Разовьем следующую идею приближенного вычисления массы этой |
|||||||||||||||
линии. |
Разделим |
линию |
AB |
на |
n |
|
небольших |
участков |
точками |
||||||
A = A , A, A , A ,...,A = B и будем считать, |
что на участке |
A A плотность |
|||||||||||||
0 |
1 2 |
3 |
n |
|
|
|
|
|
|
|
|
|
i−1 i |
|
|
постоянная, |
например, |
такая, |
как |
в |
|
некоторой |
точке |
P(ξi ,ηi , νi ) , |
|||||||
принадлежащей, отрезку кривой Ai−1 Ai . |
Тогда масса участка Mi может быть |
||||||||||||||
приближенно вычислена по формуле |
M |
i |
= ρ(ξ |
,η , ν |
) |
l , |
где |
l |
есть |
||||||
|
|
|
|
|
|
|
|
i |
i i |
|
i |
|
i |
|
|
длина участка линии от точки |
A |
до точки A. Масса всей линии может |
|||||||||||||
|
|
|
|
|
i−1 |
|
|
|
i |
|
|
|
|
|
|
быть приближенно вычислена по формуле