

8857
.pdfВ диссертационной работе для изображения фигур |
|
|||||||
пространства R4 используется трехмерная проекционная |
|
|||||||
модель |
(гиперэпюр |
Наумович), |
получающаяся |
|
||||
ортогональным |
проецированием |
геометрических |
|
|||||
объектов |
|
пространства |
R4 |
на |
взаимно |
|
||
перпендикулярные |
гиперплоскости |
проекций. |
|
|||||
Возможность |
практического |
применения гиперэпюра |
|
|||||
связана |
с |
|
эффективным |
развитием |
средств |
Рис. 19. Ортогональное |
||
компьютерной графики. |
|
|
|
|
проецирование в R4 |
|||
|
|
|
|
|
||||
Конструктивные построения на гиперэпюре выполняются в соответствии с инвариантными свойствами ортогонального проецирования в расширенном евклидовом пространстве R4(xyzt) (рис. 19).
Свойство 1. Если n-плоскость Σn (n ≤ 3) параллельна гиперплоскости Г′(xyz), то проекция на Г′ любой фигуры, вложенной в Σn, конгруэнтна самой фигуре.
Свойство 2. Если k -плоскость k (k ≤ 3) перпендикулярна гиперплоскости Г′(xyz), то ортогональная проекция Δ′ плоскости k на Г′ вырождается в (k-1)- плоскость Δ′=Δk∩Г′.
На основании свойств 1, 2 в диссертационной работе доказаны теоремы о ортогональных проекциях взаимно перпендикулярных прямых и плоскостей четырехмерного пространства.
Теорема 5.1. Если n-плоскость Σn (n ≤ 2) параллельна гиперплоскости Г′(xyz), а k-плоскость k (k ≤ 3) перпендикулярна Σn, то их ортогональные проекции Σ′ и Δ′ взаимно перпендикулярны (рис. 20).
Доказательство. Рассмотрим поляритет P, установленный в Г∞(X∞Y∞Z∞T∞) мнимой 2-сферой M2, полученной в сечении произвольной гиперсферы K3 пространства R4 гиперплоскостью Г∞ (P – абсолют пространства R4). В поляритете P прямая s∞ сопряжена с прямой d∞, инцидентной точке T∞. Следовательно, плоскость 2, перпендикулярная к Σ2(A, s∞), проходит через d∞. Мнимая окружность e∞=M2∩X∞Y∞Z∞=K3∩X∞Y∞Z∞ устанавливает в несобственной плоскости X∞Y∞Z∞ поляритет P′ (абсолют пространства Г′). Поляритет P′ может рассматриваться как сечение поляритета P плоскостью X∞Y∞Z∞. Так как прямой s∞ в поляритете P соответствует прямая d∞, то прямой s∞ в P′ соответствует точка D∞=d∞∩X∞Y∞Z∞. Следовательно, в Г′ прямая или плоскость, инцидентная D∞, перпендикулярна плоскости, проходящей через s∞. Проекция Σ′ плоскости Σ2 на гиперплоскость Г′
21

определена несобственной прямой s∞ и проекцией A′ точки A. Проекция Δ′ плоскости 2 на Г′, согласно свойству 2, вырождается в прямую m′=A′D∞. Так как прямая s∞ и точка D∞ сопряжены в P′, то в Г′ прямая m′ (вырожденная проекция плоскости 2) и плоскость Σ′ (проекция плоскости Σ2) взаимно перпендикулярны. Теорема 1 доказана для случая n=2, k=2. Доказательство теоремы для других случаев следует из рассмотрения сопряженных элементов в поляритетах P и P′.
Условно назовем гиперплоскость Г′(xyz) “фронтальной”, а Г′′(xyt) – «горизонтальной» плоскостями проекций. В плоскости общего положения Ψk (k ≤ 3, k≠1) выделим плоскости уровня Φk-1 и Ηk-1, параллельные Г′ и Г′′ соответственно, и назовем их «фронталью» и «горизонталью». Тогда справедлива следующая теорема (аналог теоремы о проекциях взаимно перпендикулярных прямых и плоскостей трехмерного пространства).
Теорема 5.2. Если в R4 плоскость Ωn (n ≤ 2) перпендикулярна плоскости общего положения Ψk (k ≤ 3, k≠1), то на гиперэпюре Г′- Г′′ горизонтальная проекция Ω′′ плоскости Ωn перпендикулярна горизонтальной проекции Η′′ горизонтали Ηk-1, а фронтальная проекция Ω′ плоскости Ωn перпендикулярна фронтальной проекции Φ′ фронтали Φk-1, где Ηk-1 Ψk, Φk-1 Ψk. Доказательство теоремы 5.2 сводится к двукратному применению теоремы 5.1.
Выявленные инвариантные свойства и доказанные теоремы позволяют применить способ повышения размерности объемлющего пространства для моделирования поверхности, опирающейся на заданный контур ABCD (рис. 21).
Отображаем плоскости σ, τ, η, ρ вместе с нахо- |
|
|
дящимися в них звеньями контура ABCD на про- |
|
|
странство R4(xyzt). Для этого отмечаем в каждой из |
|
|
плоскостей три произвольные точки и «выносим» |
|
|
их из Г′(xyz) в R4, присваивая им произвольные ко- |
|
|
ординаты по оси t. Реализуется взаимно однознач- |
|
|
ное отображение (биекция) множества точек плос- |
|
|
кости σ как прообраза, вложенного в трехмерное |
Рис. 21. Опорный контур |
|
поверхности в пространстве R3 |
||
пространство Г′, на множество точек образа – плос- |
||
|
кости σ0, лежащей в R4 (рис. 22).
Плоскости σ и σ0 определяют гиперплоскость T(σ∩σ0), содержащую несобственную точку T∞ оси t. Биекция σ↔σ0 обеспечивается проецированием точек плоскостей σ, σ0 друг на друга пучком проецирующих прямых с центром в T∞. Все проецирующие прямые вложены в гиперплоскость T. Звено ASB σ отображается в звено A0S0B0 σ0 (см. рис. 22). Отображая плоскости всех звеньев кон-
22

тура ABCD на R4(xyzt), получаем контур w0=A0B0C0D0, размещенный в четырехмерном пространстве. Исходный контур ABCD считаем ортогональной проекцией контура w0 на гиперплоскость Г′.
Рис. 22. Отображение 2-плоскости на |
Рис. 23. Четырехзвенный |
пространство R4(xyzt) |
контур w0 в R4 |
Получаем задачу: в пространстве R4(xyzt) дан замкнутый контур w0=A0B0C0D0 (рис. 23). Требуется составить алгоритм построения двумерной поверхности пространства R4, опирающейся на замкнутый контур w0. Решением исходной задачи является ортогональная проекция этой поверхности на Г′(xyz).
Алгоритм моделирования поверхности в пространстве R4 (Д.В. Волошинов)
1.Отмечаем базисные точки U0=σ0∩η0, V0=τ0∩ρ0 контура w0 в R4.
2.Между точками противолежащих звеньев устанавливаем взаимно однозначные соответствия. Пусть соответствие звеньев A0B0 и C0D0 устанавливается
функцией φ1, а звеньев A0D0 и B0C0 – функцией φ2.
3.Формируем в R4 пучки вспомогательных плоскостей δ и ω. Плоскости пучка δ, включая в себя ρ0 и τ0, проходят через базисную точку V0 и через пары соответственных в φ1 точек. Плоскости пучка ω, включая в себя σ0 и η0, проходят через U0 и через пары соответственных в φ2 точек. Плоскости пучка пересекаются между собой в его базисной точке.
4.Точки пересечения плоскостей разных пучков образуют двумерную поверхность в четырехмерном пространстве, натянутую на контур w0. Задача решена.
На сформированной таким образом поверхности располагаются два семейства образующих. Многообразие функций соответствия φ1, φ2 порождает многообразие двумерных поверхностей в R4, проходящих через контур w0.
Сравнение с ключевым способом. Пусть требуется построить отсек судовой поверхности, ограниченный палубной линией BC, килевой линией AD и шпангоутами AB, CD. В соответствии с прогрессическим ключевым способом, вводится треугольный «ключ» A4B4C4, проекционно связанный с фронтальной и
23

горизонтальной проекциями контура ABCD (рис. 24, а). Проводим прямые M2N2, K1L1 и вычерчиваем на “ключе” отрезки M4N4 и K4L4, пересекающиеся в точке P4. Эту точку переносим на прямые M2N2, K1L1 и считаем ее принадлежащей конструируемой поверхности.
Рис. 24. Модель поверхности на контуре ABCD: а – прогрессический ключевой способ; б – поверхность в четырехмерном пространстве
Покажем, что здесь неявно реализован рассмотренный выше алгоритм построения поверхности в пространстве R4. На рис. 24, б представлена трехмерная проекционная модель контура w0=A0B0C0D0, расположенного в R4, у которого плоскости противолежащих звеньев σ(AB) и η(CD) пересекаются в базисной точке U0=Z∞, а плоскости τ(BC) и ρ(AD) – в точке V0=Y∞. Плоскости σ, η инцидентны точке Z∞, поэтому их проекции на гиперплоскость xyt вырождаются в прямые линии. Функциональные соответствия φ1, φ2 между точками противолежащих звеньев установлены посредством гиперплоскостей уровня, параллельных гиперплоскостям проекций xyt и xzt. Точка пересечения P плоскостей δ(MNY∞) и ω(KLZ∞) принадлежит моделируемой поверхности. При этом поверхности, сконструированные ключевым способом (см. рис. 24, а) и способом выхода в R4 (см. рис. 24, б), тождественно совпадают.
Частный случай. Пусть палубная линия BC – кривая второго порядка. Тогда проекция искомой поверхности на пространство Г′′(xyt) – коноид с плоскостью параллелизма xt (алгебраическая поверхность 4 порядка). В сечении коноида плоскостью δ′ получаем кривую 4 порядка M′P′N′. Точечные поля плоскостей
24

δ′ Г′′(xyt) и δ Г′(xyz) проекционно связаны, поэтому в пространстве Г′ образующая MPN (бортовой стрингер) является алгебраической кривой четвертого порядка.
Покажем, что, в отличие от классического ключевого способа, применение способа выхода в пространство R4 предоставляет возможность сформировать продольный силовой набор поверхности из участков кривых не четвертого, а второго порядка. Повернем контур ABCD конструируемого отсека таким образом, чтобы плоскость τ палубной линии BC совместилась с yz. Выносим контур в R4, придав узлам произвольные значения координат по оси t (рис. 25). Выбираем базисные точки: V0=Y∞=τ∩ρ,
U0=Z∞=σ∩η. Устанавливаем соответствие φ1 между точками звеньев AB и CD посредством вспомогательных гиперплоскостей уровня x=const, а соответствие φ2 между звеньями BC и AD – с помощью гиперплоскостей y=const.
Соответственные в φ1 точки, совместно с базисной точкой Y∞, определяют пучок плоскостей δ, «пробегающих» от плоскости палубы до киля. Аналогично, множество пар соответственных в φ2 точек и базисная точка Z∞ определяют пучок плоскостей ω, «пробегающих» между шпангоутами AB и CD.
Множество ∞2 точек пересечения плоскостей пучков δ и ω определяет в R4 искомую поверхность, проекция которой на гиперплоскость xyt – коноид ψ′ с плоскостью параллелизма xt и направляющей коникой B′C′. В xyt плоскость δ′(M′N′Y∞) пересекается с коноидом ψ′ по кривой второго порядка M′N′. Точечные поля δ′ и δ, вложенные в гиперплоскости Г′′(xyt) и Г′(xyz), связаны на гиперэпюре перспективно-аффинным соответствием, поэтому в исходном пространстве xyz кривая MN δ также будет участком коники. Множество плоскостей пучка δ порождает множество продольных образующих (кривых второго порядка MN) моделируемого отсека поверхности.
Таким образом, если палубная линия BC – участок КВП, то, независимо от формы шпангоутов AB и CD, отсек ABCD конструируемой поверхности может быть образован движением дуги КВП. При этом форма образующей MN меняется от палубной линии BC до прямолинейного киля AD (см. рис. 25).
25

Поверхность на трехзвенном контуре (рис. 26). Если одну из вершин трехзвенного контура считать выродившимся в точку четвертым звеном, то рассмотренный алгоритм полностью сохраняет свою конструктивную определенность. Пусть требуется построить поверхность, проходящую через контур ABC. Присваивая узлам произвольные значения координат по оси t, получаем контур A0B0C0 в R4. Положим
σ0(A0C0)∩η0(B0C0)=C0Z∞, τ0(A0B0)∩ρ0(C0)=X∞, где ρ0 –
плоскость выродившегося в точку C0 звена, противолежащего звену A0B0. При таком выборе базисных инциденций плоскости звеньев A0C0, B0C0 и сами звенья про-
ецируются на Г′′(xyt) прямыми A′C′ и B′C′, а проекция на |
Рис. 26. Поверхность на |
|
|
Г′′ звена A0B0 определяется из условия его принадлеж- |
трехзвенном контуре |
ности плоскости τ0(A0B0X∞).
Формируем в R4 два пучка вспомогательных плоскостей ω и δ. Плоскости ωi пучка ω с осью C0Z∞ перспективны ряду точек звена A0B0. Плоскости δj пучка δ проходят через базисную точку X∞ и через точки пересечения противолежащих звеньев A0C0 и B0C0 гиперплоскостями уровня y=const. Двухпараметрическое множество точек пересечения плоскостей пучков δ, ω образует поверхность, проекция которой на Г′′(xyt) – коническая поверхность с вершиной C′ и направляющей A′B′, а на Г′(xyz) – искомая поверхность.
|
Гиперэпюр Наумович (рис. 27) наилучшим образом подходит для визуали- |
|||||
зации |
фигур |
четырех- |
|
|||
мерного |
пространства |
|
||||
средствами |
компьютер- |
|
||||
ной графики, |
поскольку |
|
||||
представляет |
|
собой |
|
|||
трехмерную |
аксономет- |
|
||||
рическую |
|
проекцион- |
|
|||
ную модель четырехмер- |
|
|||||
ной геометрической фи- |
|
|||||
гуры, |
характеризующу- |
|
||||
юся минимальной разно- |
|
|||||
стью |
между |
|
размерно- |
|
||
стями |
пространств об- |
Рис. 27. Компьютерная визуализация поверхностей |
||||
четырехмерного пространства |
||||||
|
|
|
|
|
||
|
|
|
|
|
26 |
|

раза и прообраза. На аксонометрическом гиперэпюре наглядно представлены проекции конструируемых поверхностей на гиперплоскости проекций xyz и xyt (по определению И.И. Котова, «конкурирующие поверхности»). Преимущество рассматриваемого способа моделирования заключается не только в наглядности, но и в возможности выполнения точных конструктивных построений непосредственно на аксонометрическом чертеже, представленном на экране компьютера
(см. рис. 27).
В шестой главе исследуется теоретическая и практическая возможность конструктивной реализации на ЭВМ алгоритма построения соответственных точек в квадратичном кремоновом преобразовании Ω с мнимыми F-точками, и алгоритма реконструкции преобразования Ω, заданного семью парами соответственных точек.
Построение соответственных точек в квадратичном преобразовании, заданном мнимыми F-точками. Согласно Seudevitz, преобразование Ω определяется либо с помощью двух пар проективных пучков прямых с вершинами в F-точках, либо указанием трех пар действительных F-точек и еще одной пары соответственных точек. Предложенные в диссертации конструктивные методы компьютерной визуализации мнимых геометрических образов позволяют разработать алгоритм построения соответственных точек в преобразовании Ω, заданном как действительными, так и мнимыми F-точками.
Пусть квадратичное соответствие Ω плоских полей П, П′ задано тремя парами F-точек и парой точек A~A′. В поле П начертим коническое сечение e, проходящее через A, F1, F2, относительно которого точка F3 и прямая j3=F1F2 являются полюсом и полярой. Такое же коническое сечение e′ начертим в плоскости П′ (рис. 28). Введем в рассмотрение коллинеацию Δ, в которой F1~F′2, F2~F′1,
F3~F′3, A~A′.
Рис. 28. К лемме 6.1 |
Рис. 29. К лемме 6.2 |
27

Лемма 6.1. Квадратичное преобразование Ω и коллинеация устанавливают между точками коник e и e′ одно и то же взаимно однозначное соответствие, за исключением F-точек.
Отметим в П произвольную точку B и начертим полный четырехугольник F1F2MN, вписанный в e (рис. 29). Диагональные точки B, B1 полного четырехугольника F1F2MN сопряжены в поляритете с ядром e. Найдем в П′ точку B′ , соответственную точке B в коллинеации . Начертим четырехугольник F′1F′2M′N′, вписанный в e′. Диагональные точки B′ , B′ лежат на одной прямой b′3, соответствуя друг другу в преобразовании Гирста с центром в точке F′3 и инвариантной коникой e′.
Лемма 6.2. Если в проективитете точке B поля П соответствует точка B′ поля П′, то в преобразовании Ω точка B отображается в точку B′, лежащую на прямой b′3=F′3B′ и сопряженную с точкой B′ в поляритете e′, а точка B′ поля П′ квадратично отображается в точку B1 поля П, лежащую на b3=F3B и сопряженную с точкой B в поляритете e.
Рассмотрим случай, когда квадратичное соответствие Ω полей П, П′ задано парой соответственных точек A~A′ и тройками F-точек (F*1, F*2, F3)~(F′*1, F′*2, F′3), где мнимые сопряженные точки F*1~F*2, F′*1~F′*2 заданы маркерами {j3, σ(O, L)}, {j′3, σ′(O, L)} (рис. 30). Требуется построить гомалоид m′ прямой m.
Рис. 30. Две пары F-точек |
Рис. 31. Построение гомалоида m′ |
|
– мнимые сопряженные |
||
|
В плоскости П начертим конику e, проходящую через A, F*1, F*2 и удовлетворяющую условию: точка F3 и прямая j3=F*1F*2 – полюс и поляра относительно e. Повторяя построение на П′, получаем e′ (рис. 31).
На прямых j3 и j′3 находим точки P1~P′1, Q~Q′S, соответственные в проективитете . Прямой m поля П соответствует в прямая m′ , проходящая через точку J′, найденную из условия (PP1QJ)=(P′P′1Q′SJ′).
Согласно лемме 6.1, в преобразованиях Ω и точкам M, N пересечения прямой m и коники e отвечают в П′ точки M′, N′ пересечения прямой m′ и коники e′. Следовательно, гомалоид m′ прямой m должен пройти через точки M′, N′ и через F-точки F′*1, F′*2, F′3.
28
Согласно лемме 6.2, произвольная точка прямой m переходит в точку гомалоида m′ в результате линейного преобразования и последующего преобразования Гирста с центром F′3 и инвариантной коникой e′. Например, точке B поля П отвечает в точка B′ поля П′; в свою очередь, точка B′ в преобразовании Гирста с центром F′3 и инвариантной коникой e′ переходит в точку B′, соответствующую точке B поля П в отображении Ω. Задача имеет два решения, что обусловлено неопределенностью порядка взаимного соответствия мнимых сопряженных точек.
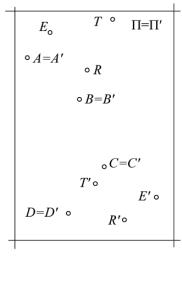
Компьютерная реконструкция квадратичного преобразования. Даны 7 пар соответственных точек A~A′, B~B′, C~C′, D~D′, E~E′, R~R′, T~T′ квадратичного кремонова преобразования Ω. Требуется построить F-точки преобразования.
Выполним проективное преобразование Λ плоскости П, переводящее четырехугольник ABCD в четырехугольник, конгруэнтный
четырехугольнику A′B′C′D′ поля П′ и совместим плоскости П и П′ до совмещения конгруэнтных четырехугольников (рис. 32). Требуется найти F-точки квадратичного преобразования Ω(П↔П′), заданного семью парами соответственных точек, из которых четыре пары совпадают. Выделяя из трех пар не совпадающих соответственных точек какие-либо две пары, например, E~E′, R~R′, и исключая из рассмотрения оставшуюся пару T~T′, получаем квадратичное преобразование ωER. Множество ∞1 преобразований ωER индуцирует в полях П=П′ пучки хорд fER, f′ER, проективные пучку конических сече-
ний Ψ(ABCD). Исключая другие пары точек, соответственных в Ω, получаем однопараметрические семейства преобразований ωET и ωRT, также порождающие пучки хорд, проективные Ψ. Комбинируем преобразования попарно: ωER-ωET, ωRT-ωET, ωER-ωRT. Каждая пара преобразований индуцирует проективные между собой пучки хорд. Точки пересечения проективно соответственных прямых в этих пучках образуют вспомогательные конические сечения. Пара преобразований (ωER-ωET) порождает коники gE и g′E, пара (ωRT-ωET) – коники gT, g′T, пара (ωER- ωRT) – коники gR, g′R.
Теорема 6.1. В преобразовании Ω точки F1, F2, F3 совпадают с точками пересечения конических сечений gE, gT, gR, а точки F′1, F′2, F′3 – с точками пересечения конических сечений g′E, g′T, g′R.
29

Согласно теореме 6.1, вспомогательные КВП gE, gT, gR должны пересекаться между собой в искомых точках F1, F2, F3. Выполняя точную компьютерную визуализацию этих конических сечений, убеждаемся, что через каждую из F-точек проходят все три КВП (рис. 33).
В седьмой главе диссертации рассмотрены два аспекта теории КВП и ПВП. Во-первых, исследуются некоторые свойства конических сечений и квадрик. Вовторых, прикладная программа построения конических сечений «Компьютерный коникограф» применяется как
эталонный чертежный инструмент при конструктивном Рис. 33. Проверка решении теоретических и прикладных задач начертательной геометрии. Получены следующие результаты.
1. Дано доказательство инвариантности отношения радиусов кривизны соприкасающихся коник в точке касания при произвольном
проективном преобразовании: отношение q радиусов кривизны соприкасающихся конических сечений e1, e2, измеренное в точке T их двухточечного соприкосновения, равно q=(12T3), где 1, 2, 3 – точки пересечении коник e1, e2, eВ=e∩t с произвольной прямой u, проходящей через T, а eВ – вырожденная коника пучка ε(e1, e2,..) (рис. 34).
2. Рассмотрены все возможные случаи распадения биквадратной кривой на две кривые второго порядка в пучке квадрик, находящихся в
действительном или мнимом двойном соприкосновении. Показано, что справедлива теорема, обратная к теореме о двойном прикосновении ПВП: если линия пересечения квадрик Φ1, Φ2 распадается на две плоские кривые a, b (действительные или мнимые), то поверхности Φ1 и Φ2 соприкасаются в действительных или мнимых точках U, V пересечения кривых a, b. Согласно этой теореме, все особые случаи распадения биквадратной кривой на две КВП (вещественные или мнимые) являются частным случаем теоремы о двойном соприкосновении ПВП. Доказательство теоремы следует из факта существования общей пары взаимных поляр у квадрик, находящихся в действительном или мнимом двойном соприкосновении.
3. Доказана теорема: фокальные квадрики с общим фокусом находятся в мнимом двойном соприкосновении. Доказанная теорема практически использована при разработке методики конструирования соединения оболочек типа квадрик вращения с помощью плоского сварного шва.
30