

8325
.pdf
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
30 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Выразим необходимые линейные и угловые скорости через искомую |
|
|||||||||||||||||||||||||||||||||||
скорость |
: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Тело Avсовершаетq |
поступательное движение со скоростью |
vq |
. |
|
|
|
||||||||||||||||||||||||||||||
Нить нерастяжима, поэтому |
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Колесо В совершает |
вращательноеrдвижениеq |
. Его угловая скорость |
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
v |
|
v |
|
|
|
|
|
ωs tvwu tvwx txy. |
|
|
|
|||||||||||||||||||
направлена по ходу часовой стрелки и равна |
|
|
|
|
|
|||||||||||||||||||||||||||||||
Скорость точки Н равна |
|
|
|
|
vz |
|
|
ω |
sRs |
. y |
|
|
|
y |
2vq |
. |
|
|
||||||||||||||||||
Скорость точки F |
равна |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
tx|w |
|
tx∙"y |
|
|
|
|
||||||||||||
Колесо |
C совершает |
плоскопараллельное} z движениеq |
. МЦС находится в точке |
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
v |
|
v |
|
|
2v |
|
|
tyx |
tyx. |
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
ω~ |
t|•€ |tx€ |
|
|
|
|
||||||||||||||||||
D. Угловая скорость направлена по ходу часовой стрелки и равна |
|
|
|
|||||||||||||||||||||||||||||||||
Скорость точки С равна |
|
|
|
|
|
|
~ |
|
|
|
ω~ |
|
~ |
|
|
tx|€ |
|
v |
q. |
|
|
|
|
|
||||||||||||
3. Определим моменты |
инерции колес В и С. |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
v |
|
|
|
|
|
|
R |
|
|
y |
|
|
|
|
|
|
|
|
|||||||||||||||
Колесо В имеет реборду. Если толщина реборды составляет половину |
|
|||||||||||||||||||||||||||||||||||
толщины колеса, момент инерции колеса определяется по следующей |
|
|||||||||||||||||||||||||||||||||||
формуле: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
J B = |
1 |
m × |
RB 4 + rB 4 |
|
= |
1 |
m × |
(4a)4 + (2a)4 |
=10ma2 . |
|
|
|
|||||||||||||||||||||
|
|
|
|
RB 2 + rB 2 |
|
(4a)2 + (2a)2 |
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
ZB |
2 |
|
B |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
Колесо С сплошное: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
J C = |
1 |
m R2 |
|
= 0.5ma2 . |
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
ZC |
2 |
|
|
B |
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
4. Определим кинетическую энергию системы в начальном и конечном |
||||||||||||||||||||||||||||||||||||
состояниях. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T Tq Ts T~ |
|
|||||||||
где |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
В начальном состоянии тело находится в состоянии покоя: |
|
T 0. |
|
|||||||||||||||||||||||||||||||||
В конечном состоянии кинетическая энергия равна |
|
|
|
|
, |
|||||||||||||||||||||||||||||||
Тело A: |
Tq |
mqvq mvq. |
txy 1.25mvq. |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
Тело B: |
Ts |
J„ss ωs |
|
|
ma |
|
|
0.75mvq. |
|
|
||||||||||||||||||||||||||
Тело C: |
T~ m~v~ |
|
J„~~ ω~ |
|
|
mvq |
|
" ma tyx |
|
|
||||||||||||||||||||||||||
Сумма: |
T Tq Ts T~ mvq |
1.25mvq |
0.75mvq 3mvq. |
|
||||||||||||||||||||||||||||||||
∑ A |
ˆ |
|
Oq |
|
OOPq |
|
|
OPТР |
|
|
|
|
|
|
Os |
|
|
|
|
|
OOPs |
V |
|
|
|
O~ |
|
OOP~ |
V |
|
||||||
|
ARP V ARN |
|
V ARF |
V ARP |
|
V ARN |
ARP V |
ARN |
|
|||||||||||||||||||||||||||
5. Определим‰ сумму работ всех внешних сил на заданном перемещении:

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
31 |
|
|
|
Учтем, что перемещения точек пропорциональны их скоростям, и |
|
|||||||||||||||||||||||
Точка B v |
|
|
v |
OP~ |
|
|
|
S |
S |
S |
|
Os |
OPs |
|
||||||||||
Реакции |
|
OPq и |
направлены ARP |
V 0, ARN |
V 0. |
|
||||||||||||||||||
поскольку |
|
|
~ |
|
q |
|
то и |
~ |
|
|
q . |
|
|
|
|
|||||||||
|
|
|
|
неподвижна, поэтому |
|
|
OPq |
OP~ |
|
|
||||||||||||||
движенияN, |
|
N |
|
|
|
|
|
β |
|
|
|
V 0.. |
|
|||||||||||
|
Oq |
|
|
|
|
q q |
|
|
|
|
ARN |
V 0, ARN |
|
|||||||||||
ARP V m |
g S |
|
|
∙ sin |
|
|
|
перпендикулярно к направлению |
. |
|||||||||||||||
|
|
|
µ 2 m g S ∙µ0.68 1.72βm g S |
|||||||||||||||||||||
|
OPТР |
|
|
|
поэтому |
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
V |
%F |
ТР |
S |
q |
% |
q |
S % |
q |
∙ S %0.1 m g S |
||||||||||||||
ARF |
|
|
|
|
|
αN |
m . g ∙ cos |
|||||||||||||||||
ARP‰ V |
|
%m |
|
g S |
~ |
∙ sin |
%0.5 m g S |
|
|
|||||||||||||||
|
O |
|
~ |
|
|
|
|
|
~ |
|
|
|
OPТР |
|
|
O~ |
|
|
|
|
|
|||
∑ A |
ˆ |
|
|
Oq |
|
|
|
|
|
|
|
|
1.72mgS % 0.1mgS % 0.5mgS |
|||||||||||
|
|
ARP V |
ARF |
|
V ARP V |
|||||||||||||||||||
1.12mgS. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6. Найдем значение скорости тела А. |
|
|
|
|||||||||||||||||||||
Используем теорему об изменении кинетической энергии механической |
||||||||||||||||||||||||
системы: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T % T |
∑ A‰ˆ . |
|
|
||||
|
|
|
|
|
T 0, |
|
|
|
|
|
|
|
|
|
|
|||||||||
Так как |
|
|
то |
|
|
|
|
|
T ∑ A‰ˆ . |
|
|
|
||||||||||||
Составим уравнение: |
3mvq 1.12 m g S, решая которое получим, что |
|||||||||||||||||||||||
vq • |
. – — |
2.71 мс. |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Ответ: VА=2,71м/с. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Задача Д-2 |
|
|
|||
Определение реакций опор составной балки, используя принцип |
||||||||||||||||||||||||
|
|
F 20 кН; |
|
|
|
возможных перемещений |
α 30°. |
|||||||||||||||||
Дано: |
P 40кН; |
M 25 кНм; q 10 кН; a 1м; |
||||||||||||||||||||||
Определить реакции опор составной балки, используя принцип возможных перемещений.
2F
α |
|
q |
|
|
|
|
P |
М |
|
|
E |
|
|
H |
|
|
|
|
A |
|
B |
α |
|
C |
|
D |
a |
a |
a |
|
2a |
a |
a |
a |
a |
Рис.9
Решение:
1. Разложим наклонную силу 2F на вертикальную и горизонтальную составляющие, модули которых равны:

|
32 |
|
|
2• > 2• √ •√3 |
и 2• > 2• |
|
F. |
|
|||
Заменим распределенную нагрузку ее равнодействующей ž 3ŸB 30 кН. |
|||
Удалим связи, заменив их неизвестными реакциями, учитывая, что на |
|||
неподвижной опоре реакция |
_ пройдет наклонно и может быть представлена |
||
своими составляющими: вертикальной ¡_ и горизонтальной _. Горизонтальная составляющая может быть найдена их уравнения
равновесия:
∑ I 0; 2• > % _ 0; откуда _ 2• > • 20кН.
Горизонтальная сила F и горизонтальная реакция _ не совершают работу на вертикальных перемещениях, не влияют на величину вертикальных реакций и в последующих выкладках учитываться не будут.
F |
3 |
|
|
|
Q = 3qa |
|
P |
|
М |
|
|
|
|
|
|
|
|||||
α |
|
E |
|
|
H |
|
|
|
||
F |
A |
X A |
B |
|
|
C |
|
D |
||
|
|
|
|
|
|
|
||||
a |
a |
a |
2a |
a |
a |
a |
a |
|||
|
||||||||||
|
Y |
R |
A |
R |
|
R |
|
RD |
|
|
|
A |
|
B |
|
C |
|
|
|
||
|
|
|
|
0.5a |
1.5a |
|
|
|
|
|
Рис.10 |
¡_, и изобразим на |
2. Удалим опору A, заменив ее неизвестной реакцией |
|
рисунке виртуальные перемещения элементов системы. |
|
Сумма работ внешних сил на этих перемещениях равна нулю в соответствии с принципом возможных перемещений. Составим
соответствующее уравнение:
¡_ B ¢b % •√3 ∙ 2B ¢b 0, откуда
¡_ % 2•√3 0, ¡_ 2•√3 2 ∙ 20 ∙ 1.732 69.28 кН.
F 
 3
3
′ |
|
Q |
|
P |
A |
δϕ1 |
|
||
|
|
H |
М |
|
|
|
|
||
|
|
|
|
|
A |
E |
B |
C |
D |
YA
Рис.11
33
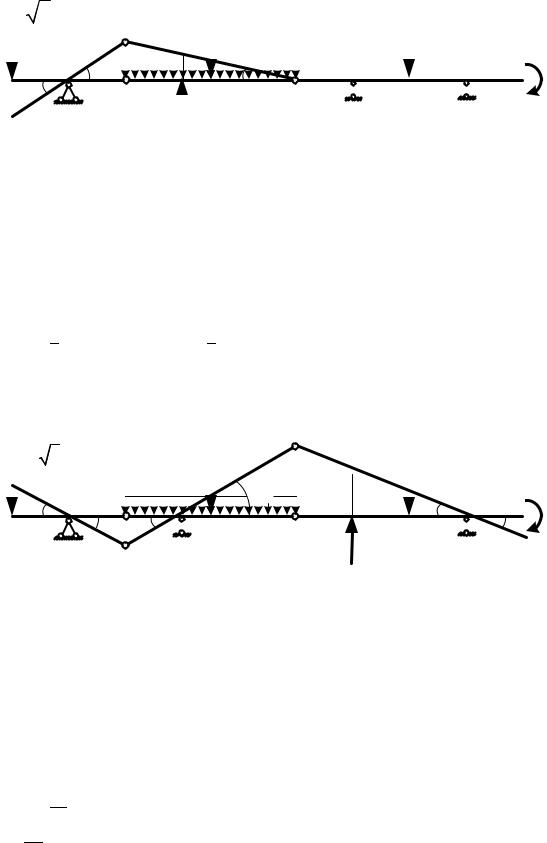
3. Удалим опору B, заменив ее неизвестной реакцией g, и изобразим на рисунке виртуальные перемещения элементов системы.
F 3 |
E′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
Q |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
δϕ1 |
|
|
|
|
|
B′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P |
|
|
|
|
|
М |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
A |
E |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
H |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
δϕ1 |
|
|
|
|
|
|
|
|
B |
|
|
|
|
|
δϕ2 |
|
|
|
|
|
|
|
C |
|
|
|
|
D |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RB |
|
|
|
Рис.12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Составим соответствующее уравнение: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
•√3B ¢b g 2B ¢b % ž 1.5B ¢b 0. |
|
¢b |
3¢b |
|||||||||||||||||||||||||||||||||||||||
Учитывая, что |
|
££¤ B ¢b 3B ¢b |
получим, что |
|||||||||||||||||||||||||||||||||||||||
•√3 B 3¢b |
|
g 2B ¢b % ž 1.5B ¢b |
0, откуда 3• 2 g % |
|||||||||||||||||||||||||||||||||||||||
1.5ž 0, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
g R1.5ž % 3•√3V #1.5 ∙ 30 % 3 ∙ 20 ∙ 1.732& %29.46 кН. |
|||||||||||||||||||||||||||||||||||||||||
4. Удалим опору C, заменив ее неизвестной реакцией |
¥, и изобразим на |
|||||||||||||||||||||||||||||||||||||||||
рисунке виртуальные перемещения элементов системы. |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Q |
|
|
|
|
|
|
H ′ |
|
|
C′ |
|
|
P |
|
|
|
|
|
|
|||
|
F 3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
δϕ1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
δϕ |
|
|
|
|
|
|
|
|
|
|
δϕ3 |
|
|
|
D |
|
М |
||||||
|
E |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
H |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
A |
|
|
|
|
δϕ2 |
|
|
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
δϕ3 |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
δϕ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RC |
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
1 |
E′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис.13 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Составим соответствующее уравнение: |
|
|
|
|
|
|
¦ ¢b 0. |
|||||||||||||||||||||||||||||||||||
%•√3 B ¢b % ž ∙ 0.5B ¢b |
|
¥ 2B ¢b % fB ¢b |
||||||||||||||||||||||||||||||||||||||||
Учитывая, что |
££¤ B ¢b B ¢b |
|
получим, что ¢b ¢b . |
|||||||||||||||||||||||||||||||||||||||
Учитывая, что |
§§¤ 2B ¢b |
3B ¢b |
получим, что |
¢b ¢b |
||||||||||||||||||||||||||||||||||||||
1.5¢b . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
%•√3 B 1.5¢b % ž ∙ 0.5B 1.5¢b ¥ 2B ¢b % fB ¢b ¦ ¢b 0. |
||||||||||||||||||||||||||||||||||||||||||
откуда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
¥ 2B % fB ¦ 0. |
|
|
|
|
|
|
|||||||||||||||
¥ Q R1.5•√3 B 0.75žB fB % ¦V
∙ #1.5 ∙ 20 ∙ 1.732 ∙ 1 0.75 ∙ 30 ∙ 1 40 ∙ 1 % 25& 44.73 кН.
34
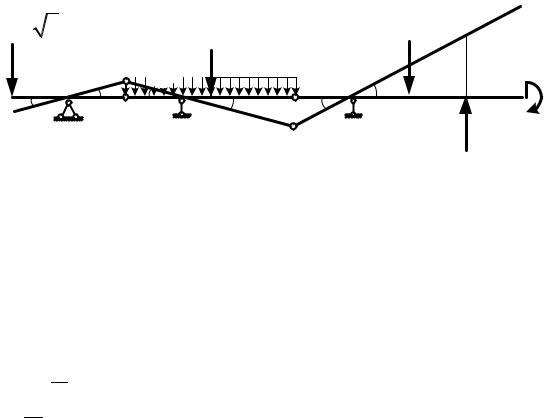
5. Удалим опору D, заменив ее неизвестной реакцией |
|
¨, и изобразим на |
|||
рисунке виртуальные перемещения элементов системы. |
|
|
|||
|
|
|
|
D′ |
|
F 3 |
P |
||||
|
|||||
A |
δϕ |
E′ |
δϕ2 |
Q |
δϕ3 |
М |
1 |
|
|
H |
|||
|
|
|
|
|
||
δϕ1 |
|
E |
|
|
C |
D |
|
B |
δϕ2 |
δϕ3 |
RD |
||
|
|
|||||
|
|
|
|
|
H ′ |
|
Рис. 14
Составим соответствующее уравнение: |
¨ 2B ¢b % ¦ ¢b |
0. |
•√3 B ¢b ž ∙ 0.5B ¢b % fB ¢b |
||
Учитывая, что ££¤ B ¢b B ¢b |
получим, что ¢b |
¢b . |
Учитывая, что §§¤ 2B ¢b B ¢b получим, что ¢b ¢b 2¢b . |
||
•√3 B ¢b ž ∙ 0.5B ¢b % fB 2¢b |
¨ 2B 2¢b % ¦ 2¢b 0. |
|
¨B % 2¦ 0.
¨"Q R%•√3B % 0.5žB 2fB 2¦V
"∙ #%20 ∙ 1.732 ∙ 1 % 0.5 ∙ 30 ∙ 1 2 ∙ 40 ∙ 1 2 ∙ 25& 20.09 кН.
6.Для проверки спроектируем все силы системы на ось Y:
∑ ¡I ¡_ g ¥ ¨ % •√3 % ž % f
69.28 % 29.46 44.73 20.09 % 20 ∙ 1.732 % 30 % 40 0.00
Проверка выполняется.
Ответ: XA=20кН, YA=69,28кН, RB=29,46кН, RC=44,73кН, RD=20,09кН.
35 |
|
СОДЕРЖАНИЕ |
|
Введение |
3 |
Задание на выполнение самостоятельной проектировочной работы |
4 |
по теоретической механике |
|
Данные для решения задач К-1 и К-2 |
19 |
Данные для решения задачи Д-1 |
20 |
Данные для решения задачи Д-2 |
21 |
Пример решения задач К-1 |
22 |
Пример решения задач К-2 |
24 |
Пример решения задач Д-1 |
28 |
Пример решения задач Д-2 |
31 |

Ведяйкина Ольга Ивановна
ВЫПОЛНЕНИЕ КУРСОВОЙ РАБОТЫ ПО ТЕОРЕТИЧЕСКОЙ МЕХАНИКЕ
Учебно-методическое пособие для выполнения курсовой работы по дисциплине «Теоретическая механика»
для обучающихся по направлению подготовки 13.03.01 Теплотехника и теплоэнергетика. Профиль Промышленная теплоэнергетика.
Федеральное государственное бюджетное образовательное учреждение высшего образования «Нижегородский государственный архитектурно-строительный университет» 603950, Нижний Новгород, ул. Ильинская, 65.
http://www. nngasu.ru, srec@nngasu.ru