

7472
.pdfНа правах рукописи
Пушкарев Сергей Алексеевич
ГЕОМЕТРИЧЕСКОЕ МОДЕЛИРОВАНИЕ ЛОКАЛЬНЫХ ХАРАКТЕРИСТИК МЕХАНИЧЕСКОГО НАПРЯЖЕНИЯ
Специальность 05.01.01 - «Инженерная геометрия и компьютерная графика»
АВТОРЕФЕРАТ
диссертации на соискание ученой степени кандидата технических наук
Нижний Новгород – 2021

2
Работа выполнена в федеральном государственном бюджетном образовательном учреждении высшего профессионального образования «Московский государственный технологический университет «СТАНКИН» на кафедре инженерной графики
Научный руководитель:
доктор технических наук, профессор
Толок Алексей Вячеславович
Официальные оппоненты:
Конопацкий Евгений Викторович, доктор технических наук, доцент,
профессор кафедры «Специализированные информационные технологии и системы» Государственного образовательного учреждения высшего профессионального образования «Донбасская национальная академия строительства и архитектуры»
Николаев Прокопий Михайлович, доктор технических наук, начальник отдела научно-технического центра научно-производственного комплекса Федерального государственного унитарного предприятия «Центральный аэрогидродинамический институт им. профессора Н.Е. Жуковского»
Ведущая организация:
Федеральное государственное бюджетное образовательное учреждение высшего образования «Московский авиационный институт (национальный исследовательский университет)»
Защита состоится «26» октября 2021 г. в «15» часов «00» мин на заседании диссертационного совета Д999.048.02 при ФГБОУ ВПО «Нижегородский государственный архитектурно-строительный университет» по адресу: 603950, г. Нижний Новгород, ул. Ильинская, 65, корпус 5, ауд.202.
С диссертацией можно ознакомиться в библиотеке и на сайте www.nngasu.ru ФГБОУ О «Нижегородский государственный архитектурностроительный университет».
Автореферат разослан «____» сентября 2021 г.
Ученый секретарь диссертационного совета
доктор технических наук, профессор |
. В. Лагунова |
3
Актуальность темы.
Одними из ключевых параметров, существенно влияющих на принятие инженерных решений остаются параметры напряженного состояния твердого тела. На это указывает динамика развития способов его определения как в области создания новых приборов, так и новых программных пакетов для моделирования. Однако, если вопрос визуализации напряжений в выделенных сеточных регионах, как это реализуется, например, в методе конечных элементов достаточно широко освещен и широко применяется, то проблемы автоматизации моделирования и визуализации локальных напряжений, возникающих в окрестности отдельно взятой точке, описанных в классической теории сопромата, остаются открытыми.
Подобными проблемами занимаются представители зарубежной науки:
M. Ainsworth, J. Akin, J. Amini, O. Axelsson, а также отечественные исследователи: П.В. Бурков, Р.Н. Булычев, В.А. Мостаков, В.В. Маляр, В.И. Ткачев и многие др.
В настоящий период исследователями ведутся работы в направлении развития научной визуализации и введения в проектный процесс аналитически описанных геометрических моделей. Этому активно способствует развитие метода R-функционального моделирования (RFM), получившее своё начало в лаборатории прикладной математики ИПМАШ НАН Украины под руководством академика НАН Украины В.Л. Рвачёва, метода функционально-воксельного моделирования (ФВМ), развивающегося под руководством профессора А.В. Толока в ИПУ РАН и многие другие подходы, базирующиеся на бессеточных принципах работы.
Основным достоинством метода функционально-воксельного моделирования является решение проблемы переноса основных свойств непрерывности аналитического представления объекта на дискретную компьютерную основу. Предоставлен способ компьютерного построения геометрической модели на её локальных характеристиках. Это позволяет добавить к компьютерной реализации широкий класс аналитических формулировок теоретических и прикладных задач, приводя их к доступному для компьютера представлению. А значит, можно снять многие барьеры, возникавшие у компьютеризации задач аналитического моделирования.
Исследование возможностей функционально-воксельной модели (ФВ-модель) для решения задач построения напряженного состояния показало, что она рассчитана на работу с аналитическим описанием постановки задачи и не подходит для визуализации результатов расчётов, полученных традиционным методом конечных элементов. Это связано со спецификой организации данных функционально-воксельной модели, отличающейся от организации данных поверхностных сеточных моделей, используемых в современных САПР.
Цель работы. Поиск геометрических средств функциональновоксельного моделирования для построения и визуализации нормальных и касательных напряжений.
4
Задачи исследования. Для реализации этой цели были поставлены следующие основные задачи:
1.Исследовать современные подходы к моделированию и визуализации результатов расчёта величин напряжения в изотропном теле на примере метода конечных элементов.
2.Разработать дискретную модель локальной геометрии для векторных законов физики с последующим построением локальной величины напряжения.
3.Разработать алгоритм построения функционально-воксельной модели для области напряжений в изотропном теле.
4.Разработать модель пространственной деформации объекта под суммарным воздействием локальных величин напряжения, заданных областью распределённой нагрузки сложной конфигурации.
Объектом исследования является метод функционально-воксельного моделирования для построения локальных величин напряжения.
Предметом исследования являются векторные геометрические модели физических величин, модели и алгоритмы пространственных преобразований, участвующие в моделировании напряжения, возникающего в теле под действием внешней нагрузки.
Методы исследования. Для решения поставленных в работе задач использованы теоретические и практические методы исследований, основанные на: векторном анализе, методах аналитической геометрии, R- функциональном моделировании, а также методе функционально-воксельного моделирования. Для сравнения результатов, моделирование тестовых примеров проводилось методом конечных элементов.
Научная новизна
1.Предложена геометрическая модель объемного вектора, отличающегося от понятия общепринятого вектора тем, что определяется функцией распределения величины модуля вектора и функцией величины угла его направления. Объёмный вектор предназначен для реализации расчета локальных характеристик нормального и тангенциального напряжений в пространстве изотропии функционально-воксельной модели. Объёмный вектор, являясь элементом напряжённого состояния, обеспечивает возможность дискретного конструирования полей нагружения сложной конфигурации.
2.Сформулирован принцип геометрического моделирования области нагружения для функционально-воксельной модели изотропного тела, отличающийся применением рецепторной модели управления физической нагрузкой. Полученный принцип предназначен для образноаналитического моделирования нагрузки в виде многомерного векторного поля заданной геометрии. Он является инструментом моделирования дискретного поля нагружения задаваемой сложной конфигурацией.
3.Разработан локально-аналитический подход к моделированию пространственной деформации твердого тела, определенный функционально-
5
воксельной моделью, отличающийся локализацией расчёта деформации нульповерхности на области значений функции, задающей геометрию деформируемого объекта. Он основан на прямом и обратном отображении дискретно непрерывного пространства значений функции, описывающей на компьютере геометрию тела под воздействием осевого сдвига согласно локальным характеристикам напряжения. Такой подход служит для построения геометрии деформированного состояния изотропного тела с использованием локальных характеристик нормального и тангенциального напряжений в функционально-воксельном моделировании.
Практическая значимость и внедрение. Полученные алгоритмы легли в основу расчетного модуля определения физических характеристик в процессе технологической обработки изделий на основе функциональновоксельного моделирования, разрабатываемого в ФГБОУ ВО МГТУ «Станкин».
Разработанные геометрические принципы функционально-воксельного моделирования локального напряжения прошли апробацию на предприятии ФГУП «НПО «Техномаш», утвержден соответствующий акт.
Достоверность и обоснованность полученных в работе результатов
ивыводов обеспечивается корректным применением математического аппарата векторной и компьютерной геометрии, теории сопротивления материалов, а также подтверждено результатами тестирования полученных алгоритмов с существующими активно применяемыми на практике системами для инженерных вычислений (SolidWorks).
Основные положения, выносимые на защиту:
1.На основе ФВ-модели изотропного пространства рассматривается процесс увязки локальных параметров направленного вектора силы (направление и величина) с локальными параметрами объёмного вектора напряжения (функция направления и функция величины распространения).
2.Функционально-воксельная рецепторная модель конфигурации векторного поля нагрузки позволяет распределить вектор силы на области заданной сложной формы.
3.Матричная модель пространственной деформации объекта под суммарным воздействием локальных величин напряжения, заданных на области с контуром сложной геометрии, позволяет изменять форму поверхности исходного объекта, представленного функционально-воксельной моделью.
Апробация работы. Результаты диссертационной работы докладывались
иобсуждались на Юбилейной 30-й международной конференции по компьютерной графике и машинному зрению «ГрафиКон-2020» (г. Санкт Петербург, 2020 г.). Работа докладывалась на ежегодных семинарах кафедры инженерной графики МГТУ «СТАНКИН», а также научных семинарах лаборатории 18 ИПУ РАН 2018-2019 гг. Апробация проводилась на 40-й Международной конференции «Информационные технологии в науке, социологии и бизнесе» (IT+S&E'12, Гурзуф, 2012); 12-й Международной
6
конференции «Системы проектирования, технологической подготовки производства и управления этапами жизненного цикла промышленного продукта» (CAD/CAM/PDM-2012, Москва); 14-й Международной конференции «Системы проектирования, технологической подготовки производства и управления этапами жизненного цикла промышленного продукта» (CAD/CAM/PDM-2014, Москва); 15-й Международной конференции «Системы проектирования, технологической подготовки производства и управления этапами жизненного цикла промышленного продукта» (CAD/CAM/PDM-2015, Москва); 16-й Международной конференции «Системы проектирования, технологической подготовки производства и управления этапами жизненного цикла промышленного продукта» (CAD/CAM/PDM-2016, Москва).
Личный вклад. Постановка задач исследования и формулирование теоретических основ, адаптация принципов функционально-воксельного моделирования для анализа физических параметров объектов и решения некоторых математических задач [1, 3, 5-8, 10] выполнены совместно с научным руководителем, как основным разработчиком метода функционально-воксельного моделирования. Организация и проведения экспериментальных расчетов, визуализация и анализ результатов [4, 10, 11, 12, 13, 14], разработка выносимой на защиту модели объемного вектора и его применения, принципов геометрического моделирования площади нагружения сложной формы и подходов для моделирования деформированного состояния [2, 4] разрабатывались и исследовались автором лично. При непосредственном участии автора был создан расчетный модуль определения физических характеристик в процессе технологической обработки изделий на основе функционально-воксельного моделирования, разрабатываемого в ФГБОУ ВО МГТУ «Станкин». Под руководством автора разработанные геометрические принципы функционально-воксельного моделирования локального напряжения прошли апробацию на предприятии ФГУП «НПО «Техномаш».
Публикации. Основные результаты исследований опубликованы в 14 печатных работах, 2 статьи проиндексированных в SCOPUS, и 5 научных работ в 4 изданиях, рекомендованных ВАК.
Структура и объем диссертации. Диссертационная работа состоит из введения, четырех глав с выводами, заключения, библиографического списка литературы и приложений. Общий объём составляет 127 страниц, 79 рисунков и 5 приложений. Библиографический список включает 105 наименований, в том числе 5 иностранных.
Основное содержание работы
Во введении сформулирована новизна работы, обоснована ее актуальность и практическая значимость.
7
В первой главе приведены современные подходы к моделированию тензорных величин напряжения на базе метода конечных элементов (МКЭ). Метод конечных элементов выбран как наиболее распространенный метод исследования напряжений в твердых телах при решении инженерных задач.
Рассматриваются особенности триангуляции при построении компьютерных геометрических объектов. Приводится геометрическая характеристика конечных элементов, сведения об алгоритмизации расчетов МКЭ. Рассмотрены некоторые геометрические аспекты в описании линейного треугольного конечного элемента, как базового геометрического объекта для проведения расчетов МКЭ.
Проанализированы геометрические принципы напряженного и деформированного состояния твердого тела. Особое внимание уделено определению локального напряжения в точке и деформированному состоянию в точке.
Рассмотрены основные принципы метода функционально-воксельного моделирования. Приведены определения локальных геометрических характеристик повышенного пространства, описан процесс формирования
воксельной графической модели. |
|
|
|
|
Проанализированы |
работы |
А.В. |
Толока, Н.Н. |
Голованова, |
А.А. Смирнова, В.Н. Гаврилова, |
Е.В. |
Шикина, В.Л. |
Доброскока, |
|
А.В. Скворцова., М.П. |
Галанина, |
В.Г |
Фокина, В.В. |
Шайдурова, |
Г.А. Маковкина, А.А. Алямовского, А.О. Шимановского, Б.Р. Флетчера, М.М. Филоненко-Бородич, В.Н. Винчакова и др.
В современных методах моделирования напряженного состояния твердых тел, в частности наиболее распространенном методе конечных элементов используются твердотельные модели. В отличие от поверхностных моделей они обладают некоторой виртуальной плотностью и массой. Однако эти свойства привязаны к набору треугольных пластин, имеющих относительно грубое представление геометрии объекта. Такой подход ограничивает возможности работы с отдельно взятой точкой в твердом теле и для уточнения области нагружения зачастую прибегает к пространственному перераспределению узлов сетки. Применение же метода конечных элементов в отношении воксельных моделей, которые позволяют работать с точкой, чрезмерно усложняет расчёт.
Развитие автоматизированных средств функционально-воксельного моделирования совместно с методом R-функционального моделирования (RFM), позволяет рассмотреть задачу моделирования напряженного состояния, опираясь на локальное представление геометрии в каждой точке проектного пространства, что значительно упрощает расчётные операции. При этом эффективно применяется воксельная структура компьютерного представления локальных геометрических характеристик.
Согласно геометрическим принципам моделирования напряжения к точке пространства твёрдого изотропного тела прилагается направленный
вектор силы . ФВ-метод предлагает рассматривать изотропию в 3D-
|
|
|
8 |
|
|
|
|
|
|
|
|
пространстве как некоторый геометрический объект ( |
): |
|
|
+ |
+ |
||||||
|
|
|
|
|
1 |
|
2 |
|
|
||
|
|
+ = 0. При этом, каждую такую точку |
|
|
|
|
|
||||
|
|
для |
|
изотропного |
|||||||
3 |
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
пространства ( ) предлагается рассматривать как |
связку |
|
плоскостей, |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
которые можно группировать по три взаимно ортогональные (проекционные) плоскости, т.е. различно ориентированные локальные системы координат (ЛСК) с началом в точке . Привязка к таким ЛСК раскладывает вектор силы
на компоненты (нормальный и касательные вектора) вызывающие линейные и угловые перемещения точек изотропного пространства. Совокупностью пространственного вращения таких ЛСК определяется объёмный вектор (тензор), описывающий состояние нормальных и касательных векторов (напряжений) в точке для каждого пространственного положения ЛСК.
Во второй главе рассмотрены принципы геометрического моделирования локальных компонентов ( ′ , ′ , ′ ) как пространственного преобразования локальной системы координат относительно вектора .
Откуда (0,0, ′ ) и ( ′ , ′ , 0), а в глобальной системе ( , , ) и ( , , ). Введено понятие объемного вектора. Под объёмным вектором ̇
следует понимать геометрический объект, задаваемый по аналогии с традиционным вектором (направленный отрезок из начальной точки, имеющий угол направления и величину ), только для начальной точки определены функция распределения величины направления ( ) и функция распределения величины вектора ( ).
Для построения первой функции – функции распределения величины
вектора ( |
) |
проведём аналогию с локальной геометрической моделью |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
сферического |
|
распределения тепловой нагрузки |
|
(рис.1). Для этого |
||||||||||
|
|
|
необходимо |
|
|
локализовать |
||||||||
|
|
|
точку приложения |
|
||||||||||
|
|
вектора |
||||||||||||
|
|
|
единичной |
|
|
окрестностью, |
||||||||
|
|
|
|
|
||||||||||
|
|
например |
|
сферой с условно |
||||||||||
|
|
|
|
|||||||||||
|
|
|
единичной |
|
|
|
|
|
площадью |
|||||
|
|
|
поверхности |
1 = 42, где |
||||||||||
|
|
|
= 1/(2√ ). |
|
|
|
Параметр |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
есть |
приращение |
радиуса |
|||||||||
|
|
|
распределения |
|
|
|
|
величины |
||||||
|
|
|
вектора |
|
|
т.е. |
= 4 ( + |
|||||||
Рисунок 1– Модель для построения сферического |
, |
|||||||||||||
)2. Таким образом |
||||||||||||||
|
|
|
||||||||||||
|
закона ( ) |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
= 1 + 4 |
√ |
+ 42 = |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
+ 42 |
|
|
||||||
|
|
|
1 + 2 |
|
.Увеличение |
|||||||||
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
площади под приложенный вектор действует обратно пропорционально значению, поэтому закон можно записать как ( ) = 1/(1 + 2 + 4 2). В случае приложения силы

|
|
|
|
|
|
|
9 |
|
|
|
|
|
|
к поверхности твёрдого тела рассматриваемая |
|
|
|
||||||||||
окрестность точки превращается в полусферу, а |
|
|
|
||||||||||
значит закон |
меняется |
на |
( ) = 2/(1 + 2 / |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ 4 |
2) соответственно. |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
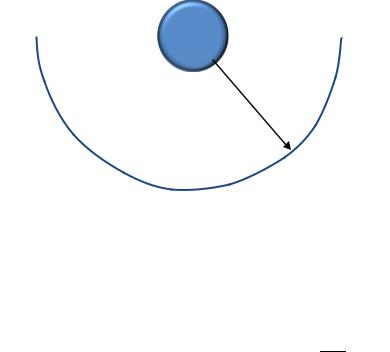
Рассмотрим построение функции величины |
|
|
|
||||||||||
направления |
( ). На |
рисунке |
2 представлен |
|
|
|
|||||||
принцип |
проецирования вектора |
|
на |
ось |
|
|
|
|
|||||
|
|
|
|
||||||||||
локальной системы координат, переносимой из |
|
|
|
||||||||||
точки А. Так моделируем перпендикуляр к |
|
|
|
||||||||||
главной площадке нормального напряжения. |
|
|
|
||||||||||
Перпендикуляр к такой площадке определяется |
|
|
|
||||||||||
направлением |
|
прямой, |
проходящей |
между |
Рисунок 2 – Проекция |
||||||||
|
|
F |
|
рассматриваемой |
|
вектора силы |
|
||||||
|
|
|
точкой |
тела |
|
|
и |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
точкой приложения силы (начальной точной |
||||||||
|
|
|
|
|
объёмного вектора). Проекция силы |
= . |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В контексте с заданием окрестности в точке, |
||||||||
|
|
|
|
|
прилагаемая сила должна иметь радиус плоской |
||||||||
|
|
|
|
|
окрестности |
приложения, |
такой |
радиус |
|||||
|
|
|
|
|
окрестности так же принимается за (как |
||||||||
|
|
|
|
|
показано на рисунке 3). |
|
|
|
|||||
|
|
|
|
|
Если |
|
рассматривать |
|
изотропию |
||||
Рисунок 3 – Распределение |
геометрического |
тела |
|
|
|
||||||||
как |
ограниченное |
|
|
|
|||||||||
силового потока на единичной |
|
F |
|
||||||||||
площадке окрестности точки |
пространство, |
|
|
|
|
|
|||||||
приложения силы |
|
состоящее |
из |
связок |
|
|
|
||||||
|
|
|
|
|
плоскостей, то в точке |
|
|
|
|||||
|
|
|
|
|
А такого пространства |
|
|
|
|||||
можно |
представить |
бесконечное |
множество |
|
|
||||||||
|
|
|
|||||||||||
поворачиваемых |
минимальных |
окрестностей |
с |
|
|
|
|||||||
прилагаемым к ним однонаправленным потоком |
|
|
|
||||||||||
вектора |
силы |
(рисунок 3). |
На |
рисунке |
4 |
|
|
|
|||||
демонстрируется отдельно взятый случай такого |
Рисунок 4 – Изменение |
||||||||||||
поворота |
окрестности |
|
относительно |
потока |
потока F при повороте |
||||||||
вектора , где наблюдается снижение количества |
|
площадки |
|||||||||||
элементов потока (в виде стрелок), попадающих на |
|
|
|
||||||||||
площадку окрестности (в плоском сечении) при повороте на угол . Поворот показан стрелкой. Учитывая полученное свойство, проекция приобретает следующий вид: = cos cos = 2 .
Объединив функциональные законы распределения величины вектора ( ) и распределения величины направления ( ) посредством умножения,
получим общий функциональный закон построения объёмного вектора напряжения = ̇( ( ), ( )):

|
|
10 |
|
|
|
|
|||
|
2 |
|
1 |
|
|
|
|||
= |
|
|
|
, где = |
|
|
|
. |
|
|
|
2 |
|
|
|||||
|
|
|
|||||||
1 + 2 |
|
+ 4 |
|
2√ |
|||||
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
В том случае, если начало глобальной системы координат установить в точке приложения силы, тогда ( , , ) =
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
√2 |
+ 2 |
+ 2. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
Согласно рисунку 5 имеем |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
= |
sin cos = |
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
= |
|
|
|
|
|
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
= |
sin sin α = |
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
= |
|
|
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
= cos = |
|
|
|
= |
|
|
|
|
= |
|
|
|
|
|
|
|
. |
|
|
Рисунок 5 – Объемный вектор |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
Отсюда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
; |
= |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
+ 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ 2) 2 |
|
|
|
|
+ 2 |
|||||||||||||||||||||
|
|
|
|
|
|
1 + 2 |
|
|
|
|
|
|
(1 + 2 |
|
|
|
|
|
|
|
1 + 2 |
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
; |
= |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ 2 |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
(1 |
+ 2 |
|
|
|
|
+ 2) |
2 |
|
|
1 + 2 |
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
(1 |
+ 2 |
|
|
|
|
+ 2) |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
Величина напряжения в точке вычисляется по формуле |
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| | = √ 2 + 2 + 2 |
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
По единицам измерения напряжение вычисляется как Н⁄М2. В рассмотренном случае получаем
НМ2 |
Н |
||
|
= |
|
. |
4 |
2 |
||
М |
М |
||