

6858
.pdf20
n
Поскольку по формуле (3.6) ∑ R = R , то
mk vk mvC
|
k =1 |
R |
|
Q = mvC . |
(4.2) |
Количество движения характеризует только поступательную часть движения и никакого отношения не имеет к его вращательной составляющей.
ТЕОРЕМА
Производная по времени от количества движения механической системы равна главному вектору внешних сил, действующих на систему:
|
dQ |
|
|
|
n |
R |
|
||
|
= ∑Fke |
|
|||||||
|
|
|
|
(4.3) |
|||||
|
dt k =1 |
||||||||
или в проекциях на оси: |
|
|
|||||||
dQ |
n |
|
|||||||
|
|
|
x |
= |
∑ Fkxe |
|
|||
dt |
|
|
|||||||
|
|
|
|
k =1 |
|
||||
dQ |
|
|
|
n |
|
||||
|
|
|
|
y |
= |
∑Fkye . |
|
||
|
dt |
|
|
||||||
|
|
|
|
k =1 |
|
||||
dQ |
n |
|
|||||||
|
|
|
z |
= |
∑ Fkze |
|
|||
|
|
|
|
||||||
dt |
|
|
|
k =1 |
(4.4) |
||||
|
|
|
|
|
|
|
|
|
|
Доказательство
Используем теорему о движении центра масс механической системы:
R |
n R |
|
= ∑ Fke |
||
maC |
||
|
k =1 . |
Преобразуем левуючасть формулы:
|
|
R |
d |
|
dQ |
||
R |
|
dv |
R |
||||
maC |
= m |
C |
= |
|
(mvC ) = |
|
. |
|
dt |
|
|||||
|
|
dt |
|
dt |
|||
Теорема доказана
Примечания
1.Фактически теорема о движении центра масс системы и теорема об изменении количества движения системы являются различными формулировками одной и той же теоремы, которую можно записывать либо в форме
(3.8) либо в форме (4.3).
2.Теорема об изменении количества движения системы может применяться для систем, имеющих переменную массу, в то время как теорема о дви-

21
жении центра масс системы справедлива только для систем с постоянной массой.
4.2. ТЕОРЕМА ОБ ИЗМЕНЕНИИ КОЛИЧЕСТВА ДВИЖЕНИЯ В ИНТЕГРАЛЬНОЙ ФОРМЕ
Импульсом силы за некоторый промежуток времени (0,t ) называется величина равная интегралу от силы по времени
R |
t R |
S |
= ∫ F dt |
0 |
(4.5) |
|
Если F = const, то естественно, что S = F ×Dt , где t − промежуток времени.
Размерность импульса силы [S ] = Н × с = кг × м совпадает с размерностью количе-
с
ства движения.
ТЕОРЕМА
изменение количества движения механической системы за некоторый промежуток времени равно сумме импульсов действующих на систему внешних сил за этот промежуток времени:
R n |
R |
D Q = ∑ Ske |
|
k =1 |
(4.6) |
или в проекциях на координатные оси
|
|
e |
|
|
|
n |
|
|
Qx |
= ∑Skx |
|
|
|
k =1 |
|
|
|
e |
|
|
|
n |
|
|
Qy |
= ∑ Sky |
|
|
|
k =1 |
|
|
|
n |
|
|
Qz |
= ∑Skze |
(4.7) |
|
|
k =1 . |
Доказательство
Запишем теорему в дифференциальной форме (4.3):
dQ = ∑n R e Fk
dt k =1
Проинтегрируем левую и правую части равенства по времени за рассматриваемый промежуток (0,t).

|
|
|
|
|
|
|
22 |
|
|
|
||
Левая часть: |
|
|
|
|
|
|
|
|
. |
|||
|
| |
|||||||||||
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
∑ |
|
|
|
|
∑ |
|
∑ |
|
|
|
|||||
Правая часть: |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
. |
|
|||
Теорема доказана
Выводы:
Для одной материальной точки теорема приобретает вид
1. :
где - импульс равнодействующей всех сил,, приложенных к точке.
2.То есть, импульс является такой характеристикой силы, которая показывает, насколько эта сила изменяет количество движения материальной точки или механической системы.
3.Внутренние силы не могут изменить количество движения механической системы.
4.3.СОХРАНЕНИЕ КОЛИЧЕСТВА ДВИЖЕНИЯ
Из теорем, доказанных в §4.1 и §4.1 можно сделать важные выводы.
Следствие 1
Если главный вектор внешних сил механической системы все время равен нулю, то вектор количества движения системы постоянен.
|
n |
R |
|
dQ |
R |
|
|
Действительно, если, ∑ Fi e ≡ 0 |
то |
≡ 0 и, следовательно, Q ≡ const , |
или |
||||
|
|||||||
|
i=1 |
|
|
dt |
|
||
R |
≡ const . |
|
|
|
|
|
|
mvC |
|
|
|
|
|
||
Следствие 2
Если сумма проекций всех внешних сил механической системы на какую-либо ось все время равна нулю, то проекция количества движения на эту ось постоянна.
|
|
n |
|
|
|
|
dQx |
|
|
|
||||
Действительно, если, ∑ Fixe ≡ 0, |
то из (4.4) |
следует, что |
≡ 0 |
и Qx ≡ const . |
||||||||||
|
||||||||||||||
|
|
i =1 |
|
|
|
|
dt |
|
|
|||||
R |
R |
|
|
|
|
R |
R |
|||||||
F 2 |
v 2 |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
v1 |
F 1 |
||||||
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
m2 |
|
m1 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 4.1

|
|
|
23 |
|
|
|
|
|
|
и (в проекциях) |
|
||
При выстреле, например, |
|
|
|
|||
, откуда |
. |
|
. |
|||
Отсюда видно, что скорость отката ствола будет равна |
||||||
Тема 5. Моменты инерции
5.1. Моменты инерции материальной точки и механической системы
Установлено, что мерой инертности материального тела является его масса. Но это справедливо только для поступательного движения.
Для вращательного движения мерой инертности является величина, которая называется моментом инерции.
Моменты инерции точки
Моментом инерции материальной точки относительно некоторой оси (осевым моментом инерции) называется величина, равная произведению массы точки на квадрат ее расстояния до этой оси.
Момент инерции принято обозначать буквами I или J, указывая при этом индекс соответствующей оси.
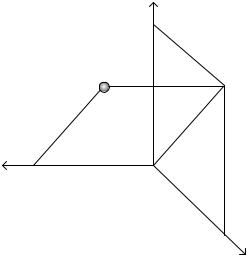
Пусть точкаМ в системе Oxyz (рис. 5.1) имеет координаты x, y, z и массу m.
Тогда ее момент инерции относительно оси z будет равен:
Jz = m h2
24
z
y
m
h
h
x |
x |
z |
|
|
O |
y
Рис. 5.1
Найдем моменты инерции этой точки относительно координатных осей. Так как , то
Jx |
= m ( y2 + z2 ) |
(5.1) |
|
|
Аналогично получаются формулы относительно двух других осей:
J y = m (z2 + x2 )
Jz = m (x2 + y2 )
Видно, что момент инерции всегда положительная величина.
Ее размерность !" кг ∙ м .
Механическая система из n материальных точек
Рассмотрим теперь механическую систему, состоящую из n точек.
Пусть k-я точка имеет массу и координаты , , .
Тогда моменты инерции механической системы можно вычислить путем суммирования моментов инерции входящих в нее точек:
J x = ∑n mk ( yk2 + zk2 )
k =1
,
25
J y = ∑n mk (zk2 + xk2 ) k =1
, |
(5.2) |
J z = ∑n mk (xk2 + yk2 )
k =1
.
Материальное тело
Рассмотрим твердое тело, в котором масса распределена непрерывно.
В этом случае тело следует поделить на бесконечно малые элементы объема с массами и вычислять моменты инерции путем интегрирования по всему объему тела:
J x = ∫( y2 + z2 ) dm
V
J y = ∫( z2 + x2 ) dm
V |
(5.3) |
|
|
J z = ∫( x2 + y2 ) dm |
|
V |
|
Радиус инерции
Момент инерции твердого тела относительно оси имеет размерность произведения массы на квадрат некоторой линейной величины.
Представим его в виде |
J |
z |
= mi2 |
, |
(5.4) |
|
|
z |
|
|
где m - масса тела, iz - радиус инерции тела относительно оси z .
Радиус инерции твердого тела относительно некоторой оси – это расстояние от оси до точки, в которой надо сконцентрировать массу тела, чтобы момент инерции этой точки относительно оси был равен моменту инерции тела.
26
5.2. МОМЕНТЫ ИНЕРЦИИ НЕКОТОРЫХ ОДНОРОДНЫХ ТЕЛ.
Ось, проходящая через центр масс твердого тела, называется центральной.
Рассмотрим, каким образом вычисляются моменты инерции некоторых простейших материальных тел относительно центральных осей.
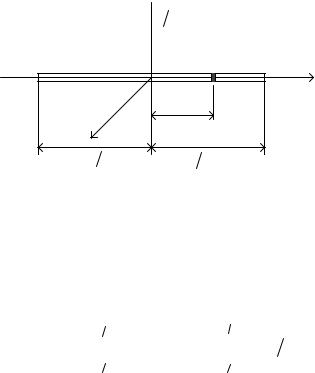
Момент инерции тонкого однородного стержня (рис. 5.2)
Вычислим момент инерции однородного тонкого стержня массой m и длиной l относительно оси, проходящей через его середину (рис. 5.2).
Масса единицы длины стержня равна ⁄'. Если выделить бесконечно
малый элемент стержня длинойdx, лежащий на расстоянииxот оси Oz, то его
.
масса будет ровна '
y 
l 2
O |
dx |
|
x |
|
x |
z |
|
l 2 |
l 2 |
Рис. 5.2
Момент инерции относительно оси z можно определить путем интегрирования:
|
+l |
2 |
|
m |
|
m |
|
x |
3 |
|
|
+l 2 |
|
|
|
|
|
|
|||||||
Jz = ∫(x2 + y2 )dm = ∫ |
|
x2 |
dx = |
× |
|
|
|
= ml 2 12 |
||||
|
l |
|
|
|
||||||||
V |
−l |
2 |
|
|
l 3 |
|
−l 2 |
|||||
|
|
|
|
|||||||||
(5.5)
Тонкая однородная круглая пластина
Моменты инерции других однородных тел различной формы выводятся аналогично с помощью интегрирования.
27
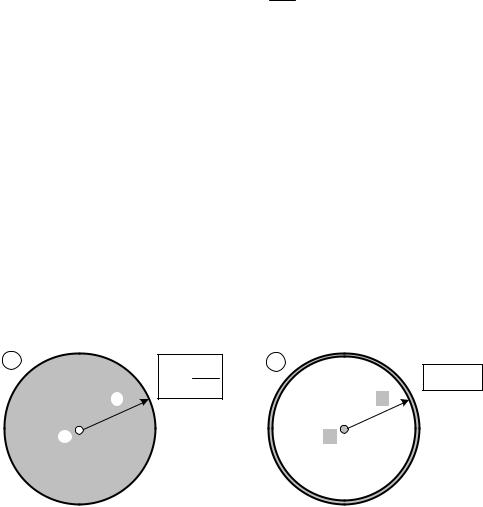
Так момент инерции круглого однородного круглого диска массой m и радиуса r относительно оси, проходящей через центр диска перпендикулярно его плоскости (рис. 5.3, а) будет равен
Jz = mr2
2
(5.6)
Круглый однородный цилиндр
Момент инерции круглого кольца (цилиндра, трубы) массой m, которая равномерно распределена вдоль окружности радиуса r , относительно оси, сов-
падающей с осью цилиндра (рис. 5.3, б), будет равен
Jz = mr2.
(5.7)
J z |
= mr 2 |
J z = mr 2 |
r |
2 |
r |
|
||
z |
|
z |
Рис. 5.3.
Примечания
Вслучае, когда расположение оси отличается от показанного на рисунках
5.2и 5.3, приведенными выше формулами пользоваться нельзя;
Выражения для моментов инерции материальных тел, имеющих другую форму, можно найти в справочниках или вывести с помощью интегрирования.
28
5.3. МОМЕНТЫ ИНЕРЦИИ ОТНОСИТЕЛЬНО ПАРАЛЛЕЛЬНЫХ ОСЕЙ
При решении задач приходится вычислять моменты инерции тел относительно осей вращения, которые не проходят через центр масс.
В этом случае применяют теорему Гюйгенса - Штайнера.
ТЕОРЕМАГюйгенса - Штайнера
Момент инерции механической системы (тела) относительно некоторой оси равен сумме момента инерции относительно параллельной ей оси, проходящей через центр масс, и величины равной произведению массы системы на квадрат расстояния между осями:
J z = J zC + md 2
(5.8)
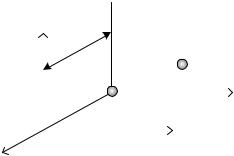
Доказательство
Пусть имеются две системы координат: ) иС ′ ′ ′, оси которых параллельны друг другу. Начало системыС ′ ′ ′, находится в центре масс меха-
нической системы. Ось отстоит от оси на расстояние d.
z′ = zC 
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
d |
C |
|
|
mk |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
yC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
O |
|
|
|
|
|
|
y′ = |
|
|
|
||
|
|
|
|
|
|
|
|
x′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 5.4 |
|
|
|
|
|
|
|||
Для произвольной точки системы ее координаты при переходе из од- |
||||||||||||||||||||||||
ной системы в другую изменятся следующим образом: |
|
|
|
|
|
|||||||||||||||||||
|
|
|
′ , |
|
|
′ . |
|
|
|
|
|
|
|
|
|
|||||||||
Вычислим момент инерции системы относительно оси : |
|
|
|
|||||||||||||||||||||
|
z |
= |
∑ |
k ( k |
k ) |
= |
∑ |
k |
( |
k |
) |
|
k |
|
∑ k k |
− 2d |
∑ k k |
∑ k |
+ |
∑ k k |
||||
J |
|
|
m x2 |
+ y2 |
|
m |
|
x′ − d |
|
2 |
+ y′2 |
= |
m x′2 |
|
m x′ + d 2 |
m |
m y′2 . |
|||||||
Пусть |
m = ∑mk |
─ масса системы. |
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
29 |
|
По определению центра масс |
∑ |
m x′ |
= mx′ (§ 3.2). |
|
k k |
c |
Но координата центра масс x′ в системеС ′ ′ ′равна нулю.
c
По той причине второе слагаемое равно нулю: 2d ∑mi xi′ = 0.
Сумма первого и последнего слагаемых равна моменту инерции относительно оси , проходящей через центр тяжести:
m x′2 |
+ |
m y′2 |
= |
m x′2 |
+ y′2 |
) |
=J |
zC |
∑ k k |
|
∑ k k |
|
∑ k ( k |
k |
|
Третье слагаемое равно d2m.
Окончательно получим:
Jz = JzC + md 2 .
Теорема доказана.
Следствие из теоремы
Изо всех моментов инерции относительно параллельных осей наименьшим будет момент инерции, вычисленный относительно центральной оси.
ПРИМЕР
Вычислить момент инерции тонкого однородного стержня массой m относительно осиz, проходящей через край стержня перпендикулярно к его оси.
z |
|
zC |
|
d |
|
|
|
|
C |
|
dx |
|
|
x |
x |
|
|
|
|
l |
2 |
l |
2 |
Рис. 5.5
Решение
Используем теорему Гюйгенса: