

1.5.3. Прямой доступ к памяти (пдп).
Способ базируется на повышении скорости ввода-вывода при непосредственной передаче данных между элементами (например, ВУ и памятью) без участия МП. Блок сопряжения одного из ВУ осуществляет самостоятельное управление приемом-передачей информации, поэтому он носит название контроллера ПДП.
Суть способа заключается в том, что на время обмена контроллер ПДП приостанавливает работу МП и захватывает магистраль в монопольное использование (максимальная "демократизация" взаимодействия между элементами МПС). Для организации такого обмена требуется еще две управляющие шины: "Захват магистрали" (ЗХВ) и "Подтверждение захвата" (ПЗХ). В этом случае структура МПС выглядит так, как показано на рисунке 24.
При необходимости обмена контроллер ПДП посылает сигнал "Захват магистрали". Получив его, МП приостанавливает свою работу (а не завершает команду) и выдает сигнал "Подтверждение захвата", после чего контроллер ПДП приступает к обмену. По завершении обмена он снимает сигнал "Захват магистрали", МП снимает сигнал "Подтверждение захвата" и продолжает приостановленную работу.
|
|
|
Рис.24 |

Возможно два режима работы контроллера ПДП, имеющие свои достоинства и недостатки.
Монопольный – магистраль захватывается на все время передачи массива информации.
Мультиплексный – магистраль захватывается только на время передачи одной посылки информации.
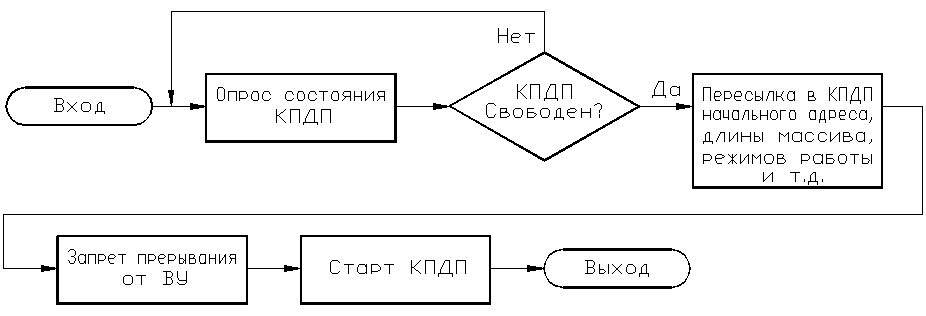
Способ ПДП требует минимальных временных затрат на его активизацию и не требует программных действий со стороны МП. Однако, контроллер ПДП должен быть предварительно настроен в основной программе на выполнение задач обмена. Для этого ему могут потребоваться информация о режимах своей работы, начальных и конечных адресах передаваемых массивов и др. Алгоритм инициализации контроллера ПДП приведен на рисунке 25.
|
|
|
Рис.25 |
Выводы. Каждый из рассмотренных трех способов организации связи с ВУ являются расширением предыдущего, в порядке их рассмотрения, может применяться совместно с другими и предоставляет разработчику широкие возможности при проектировании МПС различного назначения.
1.6. Типы магистралей.
Количество шин в магистрали МПС может колебаться от двух (прямой сигнальный и возвратный проводники) до нескольких десятков, на которых могут быть реализованы самые разнообразные протоколы обмена. В целях унификации выпускаемых модулей разработан ряд стандартов, регламентирующих требования к составу магистрали и протоколу обмена, временным и электрическим параметрам сигналов, конструкции разъемов и др. Выбор той или иной магистрали для разрабатываемой МПС зависит от наличия готовых модулей, работающих с ней, и возможности их приобретения, области применения этих модулей и многого другого.
Рассмотрим типы магистралей, которые можно разделить на две большие группы по способу передачи битов информации одной посылки: последовательные (биты передаются друг за другом по двум или четырем шинам) и параллельные (биты передаются одновременно).
В качестве примеров стандартов последовательных магистралей можно назвать: стык С2 (ГОСТ 18145-81) и ИРПС (ОСТ 11.305.916-84) - интерфейс радиальный последовательный. Стыку С2 соответствует международный стандарт ISO 2110 (RS-232), а ИРПС - "20 мА токовая петля". Для компьютеров РС – PS/2 (подключение "мышки", клавиатуры), USB (Universal Serial Bus), Serial-ATA и др.
Все многообразие последовательных магистралей определяется методом подключения и протоколом обмена. Так международный стандарт MODBUS, которого придерживаются многие производители контроллеров технологического оборудования, по-прежнему на физическом уровне предполагает использование стандартов RS-232 (RS-422, RS-485).
Магистрали в этих стандартах рассчитаны на передачу данных с небольшой скоростью на большие расстояния (удаленный терминал) или для связи с устройствами последовательного действия (например, стримером, винчестером), для которых на первый план выступают не быстродействие, а помехоустойчивость и стоимость линии передачи. Скорость передачи измеряется в бодах - бит в секунду.
|
|
|
|
Рис.27а | |
|
| |
|
Рис.26 |
Рис.27б |
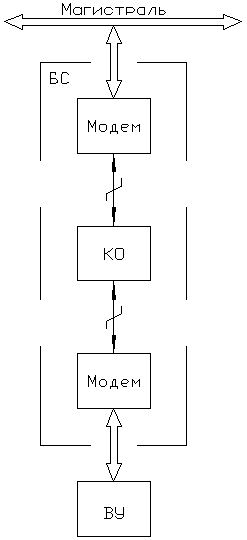


В общем виде сопряжение удаленного ВУ с системной магистралью МПС выглядит так, как показано на рисунке 26, где КО – коммутирующее оборудование, встречающееся на линии (автоматические телефонные станции, распределительные щиты, маршрутизаторы и т.д.).
Режимы последовательного обмена.
На рисунке 27 приведены протоколы обмена по последовательной магистрали для двух режимов программно-управляемого обмена: синхронного и асинхронного (соответственно, рис.27а и рис.27б). Оба режима характеризуются:
некоторым несущим параметром U (амплитуда, частота, фаза и др.), модуляцией которого обеспечивается перенос информации;
временем t передачи одного бита информации, который носит название битовый интервал, и методом кодирования информации в нем;
паузой – временем, в течение которого несущий параметр U сохраняет некоторое постоянное значение (не обязательно 0, чтобы иметь возможность идентифицировать, например, разрыв линии связи).
В синхронном режиме структура одной посылки – процесса между двумя паузами – строго фиксирована, функциональное значение битовых интервалов распределено между различными информационными группами (адрес, код операции, операнды и прочее). В асинхронном режиме посылка имеет переменную длину. Управление передачей обеспечивается введением служебных битовых интервалов: стартовые биты (обычно 1 или 2), бит паритета (контроля сохранения информации, например, суммированием по модулю 2), стоповые биты (1, 1.5 или 2). Значение 1.5 относится к длительности битового интервала.
Методы кодирования информации.
Кодирование информации в битовых интервалах осуществляется с помощью линейных кодов, наиболее показательные из которых (с точки зрения самосинхронизации и уровневого кодирования) приведены на рис.28: униполярный код NRZ; код "Манчестер-II"; код AMI.
|
|
|
Рис.28 |

Униполярный код NRZ заключается в том, что кодирование логического "0" осуществляется одним значением несущего параметра U, а логическая "1" – другим. Униполярный код требует для синхронизации передаваемой информации дополнительно двухпроводную линию синхросигнала.
Код "Манчестер-II" самосинхронизирующийся и обладает избыточностью. Для данного кода логическая "1" кодируется отрицательным перепадом сигнала в середине битового интервала, а логический "0" - положительным.
В коде AMI логический "0" кодируется отсутствием сигнала на уровне 0, а логическая "1" - попеременно положительными и отрицательными импульсами. Является частично самосинхронизирующимся.
|
|
|
Рис.29 |

Обычно последовательная магистраль реализуется телефонным проводом, однако для повышения помехозащищенности длинных линий она может выполняться витой парой (или коаксиальным проводом) и, как правило, с оптической развязкой на концах в виде токовой петли, пример которой (для однонаправленного варианта) показан на рис.29.
Когда между модема не прямое соединение, а через коммутируемое оборудование (см. рис.26), на программное обеспечение МПС возлагаются дополнительные задачи по организации "постоянного" соединения.
Установить физический контакт с другим модемом (для коммутируемых линий – "набрать номер").
Выбрать единый протокол обмена для двух устройств.
Выполнить собственно обмен информацией.
Завершить взаимодействие ("положить трубку").
Из широко распространенных (или ранее применявшихся) стандартов параллельных магистралей можно назвать:
1) MULTIBUS (И41) - применен в учебном микропроцессорном комплекте на лабораторных работах;
2) Q-BUS (МПИ по ГОСТ 26.765.51-86) - использовался в микроЭВМ "Электроника-60", МПС на базе серии 588 и др.;
3) UNIBUS ("Общая шина" мини-ЭВМ СМ-4) - применялся в ЭВМ СМ-3, СМ-4, СМ-1420, "Электроника 100/25" и т.д.;
4) ИРПР (интерфейс радиальный параллельный) - не имеет адресных шин и используется для связи двух объектов (в компьютерах РС – LPT-порт для связи с принтером или простейшим технологическим оборудованием);
5) FASTBUS - ориентирован на высокопроизводительные системы на основе эмиттерно-связанной логики (ЭСЛ).
Мультипроцессорные МПС, межсистемные и предназначенные для управления сложным экспериментом строятся на базе магистралей САМАС, VME и ADA-32 с арбитражем ведущего и ведомых модулей в каждый момент времени.