

1.5.1. Программно-управляемый обмен.
Основная идея способа заключается в том, что все процессы обработки и обмена информации в системе определяются микропроцессором (его поведением), реализующем протокол обмена с внешними устройствами, которые обеспечивают адекватную реакцию на этот протокол. То есть ВУ не могут предпринять никаких самостоятельных действий ("диктатура" МП). Для такого способа достаточно разработать единственную программу – программу работы МП.
|
|
|
|
а) |
б) |
|
Рис.10 | |


Что бы реализовать взаимодействие между МП и любым ВУ во времени, достаточно двух управляющих шин (когда и кому). Здесь допустимы два варианта реализации, показанные на рисунке 10. В случае "а" шина "Запись" (ЗП) определяет интервал времени обмена и направление обмена от МП к ВУ, а шина "Чтение" (ЧТ) – интервал времени обмена и направление передачи от ВУ к МП. В случае "б" шина "Направление" (НАПР) задает направление обмена: либо от МП к ВУ, либо от ВУ к МП; шина "Синхронизация" (СИН) фиксирует временной интервал, в течение которого происходит обмен. Обе реализации равноправны, поэтому в дальнейшем изложении мы будем для конкретности использовать вариант "а".
Протокол программно-управляемого обмена представлен на рисунке 11. При передаче информации от МП к ВУ данные на ШД выставляет МП, а ВУ должно их принять по переднему фронту сигнала "Запись". Когда же информация передается в обратную сторону, сначала появляется сигнал "Чтение" от МП, а потом уже ВУ выставляет ее на ШД. МП принимает информацию с шин данных по заднему фронту сигнала "Чтение".
|
|
|
Рис.11 |

В качестве примеров, реализуемых на лабораторных работах и в курсовом проекте, рассмотрим подключение к МПС статической и динамической индикации, статической и динамической клавиатуры. Внешнее устройство называется статическим, если обмен информацией между МП и ВУ осуществляется одновременно (параллельно) со всеми его однородными компонентами. Если же в одно и то же время информацию может получить только его один однородный компонент (последовательно), а другие не функционируют (не обладая локальной памятью), то такое ВУ называется динамическим.
Организация статической индикации.
Пример подключения нескольких светодиодов к МПС (или знакосинтезирующего индикатора из нескольких сегментов) приведен на рисунке 12. Отметим, что в этом случае использован магистральный тип межмодульной связи.
|
|
|
Рис.12 |
|
|
|
Рис.13 |


Резисторы согласуют выходы порта с выходами светодиодов по току, гася излишнее напряжение источника питания Еп. Порт служит локальной памятью, обеспечивая длительное хранение информации, высвечиваемой на светодиодах (сегментах индикатора). При большом количестве ВУ статическое подключение требует применения в блоке сопряжения большого количества портов и резисторов.
Организация статической клавиатуры.
Пример статического подключения нескольких кнопок к МПС приведен на рисунке 13. Схема аналогична предыдущей. Обращение направления передачи информации вызвало замену последовательного подключения резисторов на параллельное для обеспечения помехоустойчивости приема информации.
Организация динамической индикации.
В этом случае применяется каскадно-магистральный тип межмодульной связи. Соответствующая схема подключения дана на рисунке 14, где через "К" обозначены силовые коммутаторы (электронные ключи), разрешающие подачу питания на знакосинтезирующие индикаторы по сигналам с выхода управляющего порта 1. В порт 1 записывается управляющая информацию включения только одного из индикаторов, а в порт 2 – данные, которые должны отображаться на нем. В результате достигается простая реализация блока сопряжения по аппаратным затратам. Однако, так как индикаторы относятся к ВУ для общения с человеком, поочередный вывод информации на них должен базироваться на его психофизиологических особенностях, в-частности, опираться на инерцию зрения, чтобы человек видел одновременно данные на всех индикаторах..
|
|
|
Рис.14 |
|
|
|
Рис.15 |

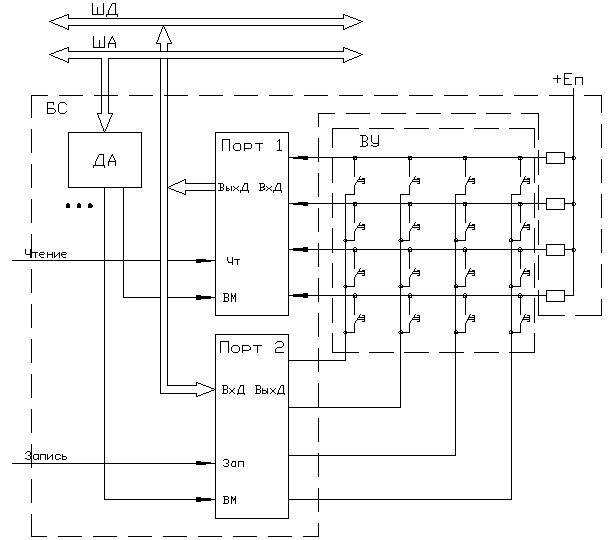
Организация динамической клавиатуры.
На рис.15 представлена схема подключения динамической клавиатуры к МПС. Опрос линий кнопок через порт 2 ведется логическим "0". В одно и тоже время опрашиваться может только одна линия кнопок. Тогда любую нажатую кнопку можно однозначно идентифицировать, приняв реакцию клавиатуры через порт 1.
Табличные методы преобразования кодов.
При передаче (приеме) информации к (из) ВУ необходимо ее преобразовывать, так как МП и ВУ "говорят на разных языках", то есть имеют различную интерпретацию одному и тому же коду. Для упрощения процедуры трансляции и увеличения скорости преобразования используют табличные методы. Суть табличного метода заключается в том, что исходному коду, подлежащему преобразованию, ставится в соответствие адрес строки таблицы, а результирующий код представляет собой содержание этой строки. Метод проиллюстрирован рисунком 16.
Часто трудность заключается в том, что непонятно, какой код ВУ должен соответствовать "визуальному образу", который порождается при взаимодействии с пользователем. Пример формирования требуемого кода знакосинтезирующего индикатора приведен на рисунке 17.
|
|
|
|
Рис.16 |
Рис.17 |


На данном примере хорошо видно что, если известно, каким логическим сигналом зажигается сегмент, то при заданном распределении сегментов индикатора по разрядам порта на рисунке 12, можно сформировать требуемый код. Если предположить, что сегменты на рис.17 засвечиваются логическим "0", то визуальной цифре "5" будет соответствовать шестнадцатиричный код "A4".
Дребезг контактов клавиатуры.
У кнопок клавиатуры есть большой недостаток. За счет упругих свойств материала кнопка при нажатии замыкается не сразу, а многократно случайным образом "замыкается-размыкается". Это явление называется дребезгом контактов. Так как МП во много раз быстрее обрабатывает информацию, чем происходит этот процесс, последний может быть интерпретирован программой работы МП как многократное нажатие кнопки. Чтобы устранить это негативное явление применяют либо аппаратные средства устранения дребезга, либо программные. При аппаратном решении этого вопроса используется эффект R-S-триггера. При программной реализации идея устранения дребезга заключается в многократном считывании состояния кнопки до тех пор, пока ее фиксируемое состояние не станет устойчивым за заданный промежуток времени, характерный для окончания процессов дребезга. Пример функционального алгоритма устранения дребезга контактов приведен на рис.18, где В – предыдущее состояние кнопки; С – счетчик характерного времени дребезга; А – текущее состояние кнопки.
|
|
|
Рис.18 |

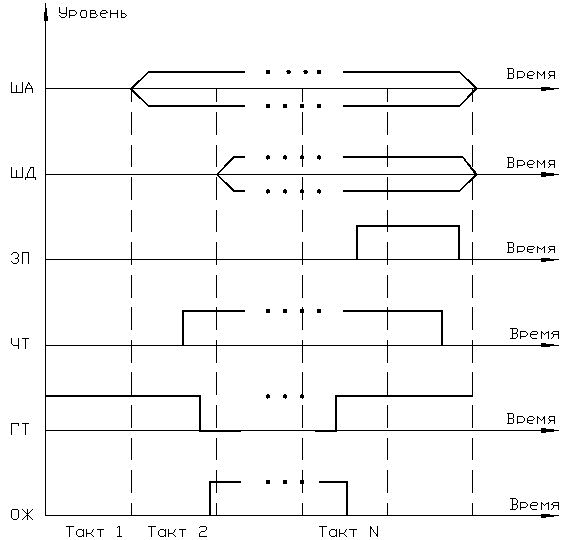
Асинхронный обмен.
До сих пор речь шла о синхронном обмене, когда ВУ "успевало" реагировать на команды МП. Если же внешнее устройство достаточно медленное, МП должен дождаться его реакции, иначе обмен будет сорван. Такой обмен с ожиданием реакции ВУ называется асинхронным. Для организации асинхронного обмена необходимо еще две управляющие шины (помимо "Запись" и "Чтение"): "Готовность" – ВУ сигнализирует МП, что оно готово (или не готово) к обмену; "Ожидание" – МП оповещает ВУ о том, что он его ждет. При этом взаимодействие МП и ВУ выглядит так, как показано на рисунке 19. На рисунке 20 приведен протокол обмена для асинхронного режима. Если ВУ не отвечает, то время ожидания может быть сколь угодно большим. Говорят, что МП "зависает". Такая ситуация недопустима при функционировании МПС и необходимо предусматривать меры для ее предотвращения.
|
|
|
|
Рис.19 |
Рис.20 |

Подводя итог рассмотрению программно-управляемого обмена, можно констатировать, что для его организации необходимо всего четыре управляющие шины: "Запись", "Чтение", "Готовность" и "Ожидание". Его особенностями (достоинствами и недостатками) являются:
минимизация аппаратных затрат на создание блока сопряжения;
значительные затраты времени работы МП по организации обмена с ВУ, особенно в режиме ожидания;
увеличение программных затрат, связанных с взаимодействием с ВУ;
пассивность ВУ, не способных инициировать обмен.
Таким образом, этот способ целесообразно использовать в тех случаях, когда быстродействие ВУ сравнимо с быстродействием МП, а управление обменом реализуется программно предельно просто.