

Методички по физике / 11K
.DOC
Министерство образования Российской Федерации
КАЗАНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ имени А.Н. Туполева
Кафедра общей физики
ЛАБОРАТОРНАЯ РАБОТА № 11К
ИЗУЧЕНИЕ ДИНАМИКИ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ
С ПОМОЩЬЮ МАЯТНИКА ОБЕРБЕКА
Казань 2002
Цель работы: экспериментальное определение момента инерции твердого тела, вращающегося вокруг неподвижной оси.
СОДЕРЖАНИЕ РАБОТЫ
Пусть твердое тело вращается вокруг неподвижной оси z (рис.1). При таком движении все точки тела описывают окружности, центры которых лежат на оси вращения. Поскольку векторы перемещения , скорость и ускорение различны для различных точек тела, для характеристики вращательного движения удобнее использовать угол поворота , угловую скорость – угловое ускорение , одинаковые для всех точек твердого тела.

Рассмотрим движение точки A . Она движется по окружности Т, центр которой O распологается на оси z . Для определения угла поворота вектора , определяющего положение точки А , введем неподвижную линию ОB. Пусть за время dt поворачивается на угол d, в указанном направлении (рис.2). Представим малый угол поворота в виде вектора d направленного вдоль оси, и его направление определим следующим образом: если смотреть с конца вектора d , вращение на угол d видно происходящим против направления движения часовой стрелки.
Векторная величина
![]() (1)
(1)
называется угловой скоростью. Она направлена вдоль оси, вокруг которой вращается тело, в сторону вектора d. Изменение вектора угловой скорости со временем характеризуется величиной
=![]() , (2)
, (2)
которую называют угловым ускорением.
Направление вектора совпадает с направлением приращения вектора угловой скорости d. Если d > 0, то и направлены в одну сторону, а при d < 0 эти векторы направлены в противоположные стороны.
Векторы линейных и угловых параметров связаны между собой соотношениями
= [] ,
a = [] , (3)
an = 2 n ,
где a
и an
– тангенциальная и нормальная
составляющие ускорения, n
– единичный вектор, направленной
по нормали к центру кривизны траектории
![]() .
.
Чтобы твердое тело с закрепленной осью привести во вращательное движение, необходимо хотя бы в одной из его точек приложить внешнюю силу, не проходящую через ось вращения и не параллельную ей. Моментом силы F, приложенной в точке А перпендикулярно оси z , называется вектор

где – вектор, указанный на рис.1 и 2. Его модуль определяется формулой
Mz = F sin . (5)
Здесь - угол между векторами и F, а величина h = sin - плечо силы (рис. 3). В частном случае =/2 получается
h = , Mz = F . (6)
Моментом инерции материальной точки относительно оси z называется произведение ее массы mi на квадрат расстояния i от материальной точки до оси вращения
Ji = mi i 2 . (7)
Для определения момента инерции тела относительно оси его мысленно разбиваем на множество мелких частей. Момент инерции тела относительно оси z равен сумме моментов инерции его частей, то есть
![]() . (8)
. (8)
Основной закон динамики вращательного движения твердого тела вокруг неподвижной оси z записывается в виде
MZ = JZ . (9)
Этот закон может быть проверен с помощью маятника Обербека.
Если сравнить (9) со вторым законом Ньютона для материальной точки
F = a m , (10)
можно увидеть их сходство. Если в (10) заменить линейное ускорение a угловым ускорением , массу m моментом инерции JZ и силу моментом силы, то получится уравнение (9). Поэтому можно говорить, что инертность тела во вращательном движении характеризуется его моментом инерции.
Описание установки
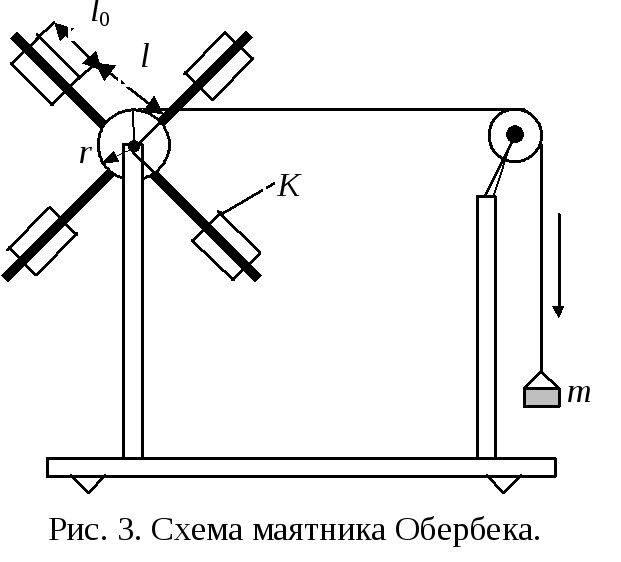
Момент силы Мz, под действием которого маятник приводится во вращательное движение, определяется по формуле
Mz = Fн r , (11)
где Fн – сила натяжения нити, r – радиус шкива. Для определения силы натяжения нити запишем второй закон Ньютона P – Fн = m a , где P =mg – сила тяжести груза. Отсюда следует
Fн = m g - ma = m (g - a) . (12)
Из (11) и (12) следует
Mz = m (g – a) r . (13)
Ускорение падения груза, определяется формулой
![]() (14)
(14)
где h – высота, с которой падает груз, t – время, в течение которого падает груз с высоты h. Подставив (14) в (13), получим
Mz
= m![]() . (15)
. (15)
С таким же тангенциальным ускорением движутся все точки шкива, находящиеся на расстоянии r от оси вращения. Поэтому угловое ускорение шкива равно
![]() . (16)
. (16)
Порядок выполнения работы
-
Запустить программу 11К.ЕХЕ. Для этого указать курсором на 11К.ЕХЕ и щелкнуть левой кнопкой мышки (в дальнейшем эту команду обозначим L’ на 11К.ЕХЕ). Изучить информацию на экране.
-
L’ на команде «Настройка».
-
На строке «Скорость» имеется ползунок. Нормальное значение скорости 20. Если при этом вращение происходит слишком медленно, то L на ползунке и переместить его в право до достижения нормальной скорости вращения.
-
Задать момент инерции крестовины. Для этого на строке «Момент инерции крестовины» записать его численное значение .
-
Задать момент инерции груза К. Для этого на нижней строке «Момент инерции груза» записать численное значение момента инерции груза.
-
В правой нижней таблице автоматически записывается масса груза m, равная 0,1 кг.
-
ОК.
-
В этой работе требуется снять зависимость Jz от R во всем доступном диапазоне изменения R (от 0 до 0,3 м) с шагом 0,07 м. Для установки груза К на крестовине L на горизонтальном ползунке и переместить ползунок.
-
ОК.
-
Установить высоту груза h. Для этого на вертикальном ползунке L и переместить груз.
-
ОК.
-
L на команде «Пуск». При этом начинается движение маятника.
-
ОК. При этом результаты эксперимента записываются в таблицу.
-
Переместить груз К в другое положение на крестовине.
-
ОК.
-
ОК.
-
Пункты 12- 16 повторяются еще 3 раза при других положениях груза на крестовине.
-
L на команде «Пуск». При этом начинается движение маятника
-
ОК.
20. По формулам (9), (15), (16) вычисляются величины Jz,, Mz,, . Данные эксперимента переписываются в тетрадь в виде табл. 1.
21. ОК.
На этом эксперимент заканчивается. Дальше по данным табл.1, строится график зависимости Jz=f(R), где R-расстояние от центра массы груза К до оси вращения.
Таблица 1.
|
m, кг |
t, с |
R, м |
a, м/с2 |
, с-2 |
Mz, Н.м |
Jz , кг . м2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Контрольные вопросы
-
Как выражается связь угловой скорости и линейной скорости точки тела, вращающегося вокруг неподвижной оси?
-
Как определяется момент инерции материальной точки?
-
Как определяется момент силы?
-
Как влияет расстояние массы до оси вращения на момент инерции ?
Литература
-
Савельев И.В. Курс общей физики, т.1. М., Наука, 1977, § 5, 38, 39, 40