

книги / Эргономика профессиональной деятельности
..pdfпроизводительности труда при минимальных затратах физической, нервной и умственной энергии рабочего, снизить утомление.
Пространственная организация рабочего места должна обеспечивать:
•соответствие планировки рабочего места санитарным и противопожарным нормам и требованиям;
•безопасность работающих;
•соответствие пространственных соотношений между элементами рабочего места, антропометрическими, биомеханическими, физиологическими, психофизиологическими и психическими возможностями работающего человека;
•возможность выполнения основных и вспомогательных операций в рабочем положении, соответствующем специфике трудового процесса, в рациональной рабочей позе, с применением наиболее эффективных приемов труда;
•свободное перемещение рабочегопооптимальнымтраекториям;
•достаточная площадь для размещения оборудования, инструмента, средств контроля, деталей и т.д.
Пространственные и размерные соотношения между элементами рабочего места должны обеспечивать:
•размещение работающего человека с учетом рабочих движений и перемещений согласно технологическому процессу;
•расположение средств управления в пределах границ моторного пространства (по ширине, глубине и высоте);
•оптимальный обзор источника визуальной информации;
•смену рабочей позы и положения;
•рациональное размещение основных и вспомогательных средств труда.
4.9. Методика анализа пространственной компоновки проектируемого рабочего места
Рабочее место для выполнения работ стоя организуют при физической работе средней тяжести и тяжелой, а также при технологи-
61
чески обусловленной величине рабочей зоны, превышающей ее параметры при работе сидя.
Определение универсальных параметров
Исходные требования:
Конструкция, взаимное расположение элементов рабочего места (органы управления, средства отображения информации и т.д.) должны соответствовать антропометрическим, физиологическим и психологическим требованиям, а также характеру работы. Рабочее место должно быть организовано в соответствии с требованиями стандартов, технических условий и (или) методических указаний по безопасности труда.
Параметры производственного оборудования и рабочего места условно делят на три группы: габаритные, свободные и компоновочные (сопряженные).
Анализ пространственной компоновки рабочего места складывается из двух этапов: подготовительного и основного.
Схема проведения подготовительного этапа
•Определить тип рабочего места согласно предлагаемой классификации. Выделить особенности рабочего места, если таковые имеются.
•Составить номенклатуру средств труда на рабочем месте. Выделить основные и вспомогательные средства труда.
•Составить перечень всех органов управления в порядке важности и частоты использования.
•Разделить органы управления на группы согласно предлагаемой классификации:
– органы ручного и ножного управления;
– органы управления постоянного, периодического или эпизодического действия.
•Составить перечень средств контроля.
•Составить перечень технологической и организационной оснастки, определив их по технической документации.
•Определить зоны сенсорной и моторной активности, выделив среди них постоянные, периодические и эпизодические.
62
Схема проведения основного этапа
•Выполнить эскиз рабочего места в трех проекциях (вид сверху, спереди, сбоку).
•На эскизах изобразить все элементы рабочего места, с которыми работающий взаимодействует в процессе труда.
•Определить базы отсчета, от которых следует измерять компоновочные параметры рабочего места, в каждой выделенной зоне сенсорной активности и изобразить их на каждом эскизе.
•Составить перечень компоновочных параметров рабочего места, подлежащих измерениям и анализу. Нанести на эскиз габаритные и компоновочные параметры рабочего места.
•На основе эскизов выполнить чертежи рабочего места.
•При расчете компоновочных и свободных параметров использовать антропометрические данные (статические и динамические)
•Расчеты и измерения компоновочных параметров рабочего места следует проводить в ортогональной системе координат с внешней относительно тела человека базой отсчета.
4.10. Методика эргономической оценки стационарного рабочего места сидя
Типы приводных элементов органов управления:
1.Кнопки и клавиши – для быстрых операций, расстояние между их соседними краями должно составлять не менее 15 мм (при работе в перчатках – не менее 25 мм), для нажимаемых большим пальцем – не менее 50 мм. При освещенности пульта управления ниже 300 лк и частоте нажатия более 5 раз в минуту размеры приводных элементов и расстояний между ними следует увеличить в 1,5–3 раза.
2.Рычажные переключатели (тумблеры). Приводной элемент тумблера должен иметь длину не менее 10–15 мм и толщину в расширенном участке 3–5 мм. Межпозиционные перемещения рычажка должны выполняться в секторе 40–60° – для двухпозиционного тумблера и в секторе 30–50° – для трехпозиционного. При размещении тумблеров на панели управления в ряд расстояние между их
63
осевыми линиями должно быть не менее 19 мм, при работе в перчатках – не менее 25 мм.
3.Рычаги устанавливают в пределах минимальной и максимальной зон досягаемости для рук. Максимальное допустимое число позиций рычага равно 8.
4.Рычаги, перемещаемые одной рукой, располагаются со стороны действующей руки на уровне локтя, при сгибании ее в локтевом суставе под углом 90–135° и при направлении движения к себе от себя. Рычаг удобнее перемещать в вертикальной плоскости, чем
вгоризонтальной. Размах рычага не должен быть более 200 мм (в любую сторону).
5.Ножные органы управления (избегать применения педалей). Если необходимо, педали располагать в зоне досягаемости или в оптимальной зоне действия ног. Для обеспечения оптимального положения ноги в положении сидя угол в голеностопном суставе должен составлять 90–100°, а в коленном 110–120°.
Алгоритм определения размерных характеристик рабочего места сидя с панелью управления
Рабочее место должно обеспечивать выполнение трудовых операций в пределах зоны досягаемости моторного поля в вертикальной и горизонтальной плоскостях для средних размеров тела человека.
•Определить рост рабочего (коррекция по табл. 4.1, 4.2), рабочую позу.
•Определить динамику деятельности (хронометражные исследования).
•Найти зоны оптимального размещения для выполнения ручных операций и размещения органов управления в вертикальной плоскости (ГОСТ 12.2.033–78).
•В существующей ситуации обеспечить применение временных устройств – помостов, лестниц, пандусов, подставок).
•Определить высоту рабочих поверхностей (номограмма), места размещения органов управления, их характеристики.
64
• Определить места размещения средств отображения визуальной информации. Соответствие физиологическим и антропометрическим характеристикам человека (рис. 4.3–4.8).
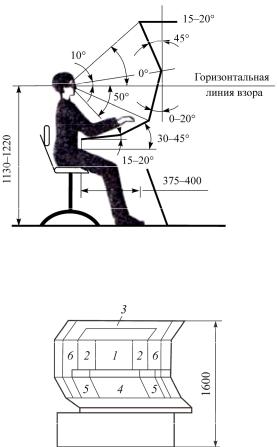
Рис. 4.3. Наклон панелей пульта управления при работе сидя
Рис. 4.4. Расположение средств отображения информации и органов управления на панелях пульта при работе сидя: 1, 2, 3 – средства отображения информации; 4, 5, 6 – органы управления
65
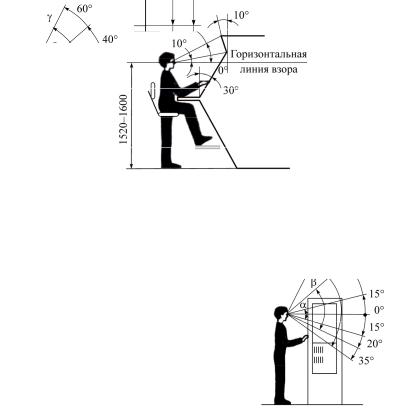
Рис. 4.5. Наклон панелей пульта управления при работе стоя-сидя.
Рис. 4.6. Расположение средств ото- |
Рис. 4.7. Углы зрительного обзора |
бражения информации и органов |
оператора при повороте глаз и |
управления на панелях пульта при |
головы: α – оптимальный угол; β – |
работе стоя - сидя: 1, 2, 3 – наиболее |
оптимальный угол при движении |
важные средства отображения ин- |
глаз; γ – оптимальный угол при |
формации; 4, 5, 6 – менее важные |
повороте головы |
средства отображения информации |
|
и органы управления |
|
66
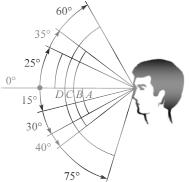
Рис. 4.8. Зоны размещения средств отображения информации на плоскости: A – часто используемая зона для быстрого и точного считывания; В – часто используемая зона для менее точного и быстрого считывания; С – редко используемая зона при выполнении работ стоя; D – зона стрелочных индиикаторов элементов наружного крепежа
Расчеты рабочих зон и антропометрия
Зона досягаемости моторного поля в горизонтальной плоскости при высоте рабочей поверхности над полом 725 мм:
1)зона размещения наиболее важных и очень часто используемых органов управления (оптимальная зона моторного поля);
2)зона размещения редко используемых органов управления (зона досягаемости моторного поля).
При расчете параметров рабочего места на основе антропометрических данных необходимо учитывать:
• выбранную систему координат и соответствующие базы отсчета;
• рабочее положение работающего;
• возможность изменения положения тела;
• величину размаха рабочих движений;
• количество элементов рабочего места;
• параметры обзора;
• необходимость ограничения рабочего пространства (кабина, площадь и т.д.);
67
•возможность регулирования параметров элементов рабочего
места;
•возможность подвижности элементов рабочего места (сиденья, педали, подставки для ног).
При использовании числовых значений антропометрических признаков следует учитывать их особенности, обусловленные полом, возрастом, национальностью и другими факторами.
Надежность деятельности человека и физиологические нагрузки
•Надёжность зависит от относительной нагрузки.
•Продолжительность работы всегда повышает вероятность ошибок; влияние нагрузок сложнее. Можно выделить четыре области нагрузок.
1.Нагрузка менее 20 %. Неблагоприятная область: внимание и активность человека не мобилизованы.
2.Нагрузка от 20 до 70 %. Рациональная область для длительной работы: человек активен, но не перегружен. При одновременной физической и информационной нагрузке область сужается до диапа-
зона 20–40 %.
3.Нагрузка от 70 до 90 %. Форсированный режим работы, допускаемый только на десятки минут.
4.Нагрузка от 90 до 100 % – это предельная нагрузка, экстремальный режим работы, допускаемый на минуты.
Важно! При любой нагрузке обеспечить рациональную компоновку оборудования.
Приведённая выше информация о трудовых возможностях человека позволяет дать ряд общих рекомендаций:
1.Компоновка оборудования на рабочем месте должна обеспечивать минимум передвижений человека в рабочей зоне при максимальной возможности визуального и слухового контроля.
2.Компоновка должна обеспечивать максимальную возможность синхронного контроля процесса и выполнения трудовых операций, особенно на уровне зон 1 и 2.
68
3.Необходимо рационально сочетать поступательные (фронтальные) и поступательно-вращательные (по дуге или ломаной линии) перемещения, что значительно сокращает время действия (ВД).
4.Нормальный режим работы нужно строить по средней информационной и физической нагрузке в пределах 20–50 % от максимума.
Для каждого рабочего места:
– скорость восприятия информации 8–20 бит/с;
– физическая нагрузка до 400 кДж/ч.
5.Максимальная информационная нагрузка 30–40 бит/с; поскольку избыточную информацию человек просто не воспримет.
6.Индикаторы КИПСА как при ручном, так и при автоматизированном управлении процессом нужно размещать в секторе нормального обзора с учётом того, что наблюдение производится с расстояния 1–4 м от приборов.
Наиболее важные приборы размещаются в центральном, а остальные – в периферийном секторе зрения.
Оценка эргономичности системы проводится по показателям, выбираемым в зависимости от решаемых задач.
5.ЭРГОНОМИКА И ПРОБЛЕМЫ АВАРИЙНОСТИ
ИТРАВМАТИЗМА
Высокая безопасность – обязательное условие продуктивной работы. Она обеспечивается при оптимальном уровне возможностей человека, максимальной эргономичности системы «человек – машина» (СЧМ). Эргономичность – одно из важных свойств. Показатели эргономичности оценивают ожидаемую степень реализации потенциальных возможностей СЧМ в ходе её эксплуатации. Оценка эргономичности производится по влиянию эргономических факторов на эффективность и безопасность системы, то есть надежность работы персонала.
69
В качестве эргономических факторов могут быть представлены:
–динамика работоспособности человека;
–уровень подготовки и переподготовки специалистов и кадров
и др.
Показатель эргономичности (Н) и показатель эффективности и безопасности (W) СЧМ (системы «человек – машина» взаимосвязаны выражением:
H = Wp/Wn,
где Wp – реализуемый уровень эффективности и безопасности системы с неполным учётом возможностей человека и неоптимальных действий (т.е. «фактический»); Wn – потенциальный уровень эффективности и безопасности системы с оптимальным учётом возможностей человека и безошибочности действий.
Реализуемый уровень эффективности и безопасности Wp характерен для реально существующей системы «человек – машина» со свойственными ей недостатками и рассчитывается из выражения
Wp = Wpо + (Wpmax – Wpo) · (1-e – t/tow),
где Wpmax – максимально возможный реализуемый уровень эффективности и безопасности системы; Wpo – реализуемый на практике уровень эффективности и безопасности системы; tow – постоянная времени цикла работы системы; t – общее время работы системы.
Показатель эргономичности как функция времени определяется по формуле
H = (1/Wn) · (Wpo + (Wpmax – Wpo) · (1-e –t/tow)).
Показатель эргономичности позволяет судить о нереализуемых «запасах» эффективности и безопасности системы, вследствие недостаточного учёта и использования в процессе эксплуатации СЧМ возможностей человека и соотношения между потенциальной и реальной эффективностью и безопасностью системы «человек – машина».
Оптимальная планировка рабочего места
Оптимальная планировка определяет соответствие рабочего места:
70