

книги / Элементы прикладной теории надежности
..pdfОтказ возникает, когда значение хотя бы одного параметра, характеризующего работоспособность, выходит за пределы установленного допуска. Поэтому условие неработоспособного состояния ТО может быть задано односторонним неравенством
yi > yiTT , i = 1,... m,
где yi – i-й параметр состояния ТО, характеризующий работоспособность; yiTT – технические требования к i-му параметру состояния ТО; m – число параметров состояния, установленных документацией.
Для примера (рис. 1) рассмотрим один из параметров, характеризующих работоспособность аксиально-плунжерного насоса, – зазор в сопряженной паре гильза-плунжер y (t ) .
y
y(t)
yTT |
|
|
|
|
отказ |
||
|
|
||
|
y(t) < yTT |
y(t) > yTT |
|
yн |
|
|
|
0 |
T – наработка до отказа |
|
t |
|
|
||
|
|
|
|
|
Рис. 1 |
|
|
Увеличение зазора приводит к росту утечек, снижению подачи насоса и КПД и в конечном итоге к отказу, критерий которого мо-
жет быть выражен неравенством y (t ) > yТТ, где yТТ – предельно допустимое значение зазора, установленное в документации.
11
Физически отказ является результатом процессов, происходящих в ТО под действием различных причин. Эти причины можно разделить на четыре группы:
1.Нарушение норм проектирования, технологии изготовления, правил и условий эксплуатации.
2.Скрытые дефекты, выявление которых требует специальных исследований.
3.Внешние воздействия (удары, вибрация, температура и т.п.), значения которых превышают расчетные.
4.Естественное старение и износ материалов.
2.2. Виды отказов
Различают следующие виды отказов (ГОСТ 27.002–2015). Полный отказ – работоспособность ТО утрачена полностью
(по всем параметрам технического состояния в соответствии с критерием отказа).
Частичный отказ – частичная потеря работоспособности по одному или нескольким параметрам технического состояния в соответствии с критерием отказа.
Зависимый отказ – отказ, обусловленный другими отказами. Независимый отказ – отказ, не обусловленный другими отка-
зами.
Внезапный отказ – отказ, характеризующийся скачкообразным изменением значений одного или нескольких параметров объекта.
Постепенный отказ – отказ, возникающий в результате постепенного изменения одного или нескольких параметров объекта.
Перемежающийся отказ – многократно возникающий самоустраняющийся отказ одного и того же характера.
Систематический отказ – отказ, однозначно вызванный определенной причиной, которая может быть устранена только модификацией проекта или производственного процесса, правил эксплуатации и документации.
Ресурсный отказ – отказ, в результате которого объект достигает предельного состояния.
12
Явный отказ – отказ, обнаруживаемый визуально или штатными методами и средствами контроля и диагностирования при подготовке объекта к применению или в процессе применения по назначению.
Скрытый отказ – отказ, не обнаруживаемый штатными методами и средствами контроля и диагностики, но выявляемый при проведении технического обслуживания или специальными методами диагностики.
Деградационный отказ – отказ, обусловленный естественным процессом старения, изнашивания, коррозии и усталости при соблюдении всех установленных правил и норм проектирования, изготовления и эксплуатации.
Конструктивный отказ – отказ, возникший по причине, связанной с несовершенством или нарушением установленных правил и норм проектирования и конструирования.
Производственный отказ – отказ, возникший по причине, связанной с несовершенством или нарушением установленных правил и норм производства (изготовления).
Эксплуатационный отказ – отказ, возникший по причине, связанной с нарушением установленных правил и условий эксплуатации.
2.3. Отказ как случайное событие
Понятие события
Событие – это исход опыта, испытания или наблюдения. Примером события может служить отказ фильтра. Возможны две причины отказа фильтра: 1. засорение фильтрующего элемента; 2. разрыв фильтрующего элемента. Продолжительность безотказной работы фильтра также считается событием, так как является исходом наблюдений или испытаний.
Событие, которое нельзя заранее предсказать, называется слу-
чайным событием.
Отказ фильтра – событие случайное, так как невозможно заранее предсказать время его появления. Это связано с тем, что в про-
13
цессе эксплуатации фильтр подвержен действию большого числа факторов, влияющих на его работоспособность: чистота рабочей жидкости (РЖ), давление, скорость, температура РЖ, механические воздействия и т.п. При этом они характеризуются достаточно большой степенью неопределенности.
Событие называется достоверным в данном опыте, если оно неизбежно происходит.
Например, при неограниченном времени эксплуатации фильтра в гидросистеме он когда-нибудь засорится, т.е. возникнет отказ – неработоспособное состояние. В данном опыте отказ – событие достоверное.
Событие называется невозможным в данном опыте, если оно заведомо не происходит.
Например, если через фильтр не протекает РЖ (таковы условия опыта), то он никогда не засорится.
Существует алгебра событий, в соответствии с которой события можно складывать и перемножать.
|
|
|
|
|
Произведение и сумма событий |
|
||||
|
|
Рассмотрим произведение и сумму двух событий. Пусть даны |
||||||||
событие A и событие B. |
|
|
|
|||||||
|
|
Произведением двух |
событий A B называется |
событие, со- |
||||||
стоящее в одновременном появлении как события A, |
так и собы- |
|||||||||
тия B. В этом случае события A и B являются совместными. |
||||||||||
ФУ |
|
|
|
|
|
|
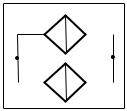
Пример. Рассмотрим фильтрующее |
|||
|
Ф1 |
устройство (ФУ), состоящее из двух па- |
||||||||
|
|
|
||||||||
|
|
|
|
|
|
|
|
раллельно соединенных фильтров (Ф1 и |
||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
Ф2) (рис. 2). |
|
|
|
|
|
Ф2 |
|
|
|||||
|
|
|
Пусть событие |
A – отказ (засоре- |
||||||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
ние) Ф1; событие B – отказ (засорение) |
||
|
|
|
|
|
|
|
|
Ф2. Тогда событие |
A B |
– отказ ФУ |
|
|
|
Рис. 2 |
в целом. |
|
|
||||
14
События A и B называются несовместными в данном опыте, если появление одного из них исключает появление другого, а их произведение есть событие невозможное.
Под суммой двух событий A + B понимается событие, которое имеет место тогда, когда произошло хотя бы одно из них, т.е. произошло событие A или событие B, или события A и B одновременно.
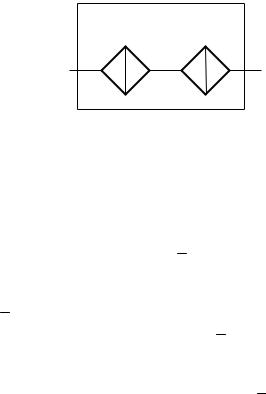
Пример. Рассмотрим фильтрующее устройство (ФУ), состоящее из двух последовательно соединенных фильтров (Ф1 и Ф2) (рис. 3).
ФУ
Ф1 Ф2
Рис. 3
Пусть событие A – отказ (засорение) Ф1; событие B – отказ (засорение) Ф2.
Тогда событие A + B в соответствии с определением – отказ Ф1 или Ф2, или Ф1 и Ф2 одновременно. Это отказ ФУ в целом.
Важное значение имеет понятие противоположного события.
Пусть дано событие A . Событие A , происходящее тогда, когда не происходит событие A , называется противоположным последнему.
Например, работоспособное состояние A и неработоспособное состояние A ТО являются противоположными событиями.
Сумма противоположных событий A + A – событие достоверное. ТО находится в одном из состояний: либо работоспособно, либо неработоспособно (иных состояний нет).
Произведение противоположных событий A A – событие невозможное. Одновременно находиться в работоспособном и неработоспособном состояниях ТО не может.
15

Вероятность случайного события
Пусть A – случайное событие. Для определения меры достоверности этого события вводят понятие вероятности наступления события:
вер( A) = P( A) .
Предполагается, что вероятность любого события заключается в диапазоне
0 ≤ P( A) ≤1.
Вероятность невозможного события равна нулю. Вероятность достоверного события равна единице.
В настоящее время формального определения вероятности не дается. Это понятие является первичным и не определяется.
При пояснении этого понятия его связывают с частотой события. Частота случайного события A в данной серии опытов – это отношение числа опытов, в которых появилось событие, к числу
произведенных опытов:
P ( A) = MnА ,
где n – число произведенных опытов; M А – число опытов, в кото-
рых событие A появилось.
Частота – характеристика опытная. Очевидно, что
0 ≤ P ( A) ≤1.
P ( A) =0 – событие A ни в одном опыте не появилось, событие невозможное.
P ( A) =1 – событие A появилось во всех опытах, событие достоверное.
При увеличении числа опытов n →∞ частота P ( A) колеблется около постоянного числа p , которое называется вероятностью события A в статистическом смысле.
16
Если известна вероятность появления события A в статистическом смысле p , то среднее число появления события A в n опытах
A = np .
Пример. Опытным путем установлено, что статистическая вероятность отказов насосов при наработке 500 ч
p = 0,05.
Можно утверждать, что из партии таких насосов в 2000 штук за 500 ч работы откажут в среднем
А = np = 2000 0,05 = 100 шт.
Произведение и сумма вероятностей событий
Поскольку случайные события можно умножать, складывать, то можно умножать и складывать вероятности этих событий.
Предварительно рассмотрим следующие определения.
1.Два события A и B называются независимыми, если вероятность каждого из них не зависит от появления или непоявления другого. В противном случае события будут зависимыми.
2.Вероятность события A при условии, что произошло событие
B , называется условной вероятностью события A и обозначается
P( A | B) = PВ ( A) .
Произведение вероятностей
Вероятность произведения двух зависимых событий A и B (т.е. вероятность одновременного появления событий A и B) равна
произведению вероятности одного из них на условную вероятность другого, в предположении, что первое имеет место, т.е.
P( A B) = P( A)PА(В) = P(В)PВ ( А).
Вероятность произведения двух независимых событий A и B равна произведению вероятностей этих событий:
P( A B) = P( A)P(В) .
17

Сумма вероятностей
Вероятность суммы двух несовместных событий (т.е. вероятность появления хотя бы одного из них) равна сумме вероятностей этих событий:
P( А+ В) = P( А) + P(В) .
Вероятность суммы двух совместных событий
P( А+ В) = P( А) + P(В) − P( А В) .
Отметим ряд важных положений.
1. Группа несовместных событий А, В,... называется полной, если в результате опыта обязательно появится одно из них. Для полной группы событий
P( А) + P(В) +…=1 .
2. Противоположные события образуют полную группу событий.
Пример. Работоспособное состояние А и неработоспособное состояние А ТО являются противоположными событиями и образуют полную группу событий. Поэтому
P( А) + P (А) =1.
Отсюда следуют важные соотношения
P( А) =1− P (А) и P(А) =1− P( А) ,
позволяющие вычислять вероятность события через вероятность противоположного события.
В прил. 2 рассмотрены примеры применения правил умножения и сложения вероятностей для определения вероятности безотказной работы гидравлических устройств.
18
3. ПОКАЗАТЕЛИ НАДЕЖНОСТИ ТЕХНИЧЕСКИХ ОБЪЕКТОВ
3.1. Основные понятия и определения
Рассмотрим следующие понятия и определения (ГОСТ 27.002– 2015).
Показатель надежности – количественная характеристика одного или нескольких свойств, составляющих надежность ТО.
Единичный показатель надежности – показатель надежности,
характеризующий одно из свойств, составляющих надежность ТО.
Комплексный показатель надежности – показатель надежно-
сти, характеризующий несколько свойств, составляющих надежность ТО.
Восстановление – это процесс перевода ТО в работоспособное состояние из неработоспособного состояния. Восстановление включает в себя идентификацию отказа (определение его места и характера), наладку или замену отказавшего элемента, регулирование и контроль технического состояния элементов ТО и заключительную операцию контроля технического состояния ТО в целом.
Ремонт – процесс перевода ТО в работоспособное состояние из предельного состояния, при котором происходит восстановление ресурса ТО в целом. В ремонт входят разборка, дефектовка, замена или восстановление отдельных деталей, узлов, элементов.
Невосстанавливаемые ТО – это ТО, восстановление работоспособности которых не предусмотрено документацией. Невосстанавливаемый ТО (элемент) работает до отказа, а затем может заменяться таким же ТО (элементом). При этом считается, что восстановление в условиях эксплуатации невозможно.
Восстанавливаемые ТО – это ТО, восстановление работоспособности которых предусмотрено документацией.
Понятия невосстанавливаемый и восстанавливаемый объект – относительны. Многие объекты на этапе хранения являются восстанавливаемыми, а на этапе применения по назначению – невосста-
19

навливаемыми (например, аппаратура летательных аппаратов, спутников: на этапе хранения – восстанавливаемая, в полете – невосстанавливаемая.)
3.2. Показатели надежности ТО
Некоторые сведения о случайных величинах
Под случайной величиной понимается величина, которая в результате опыта со случайным исходом принимает то или иное значение.
Случайная величина (СВ) может быть дискретной или непрерывной. Примером дискретной СВ является число отказов в некоторой совокупности однотипных ТО за время τ. Примером непрерывной СВ может служить время работы ТО до отказа.
Исчерпывающее представление о СВ дает закон распределения случайной величины. Это правило, устанавливающее соответствие между значениями СВ и их вероятностями.
Различают интегральный и дифференциальный законы распределения.
Интегральный закон распределения СВ – это функция действи-
тельной переменной x, которая определяет вероятность события X < x , где X – случайная величина:
F (x) = p( X < x).
Интегральный закон распределения устанавливает вероятность того, что СВ X принимает значения меньше x.
Дифференциальный закон распределения СВ (плотность рас-
пределения вероятности СВ, кратко – плотность распределения СВ) – это производная F (x) по x:
f (x) = dF (x) . dx
20