

книги / Численные методы решения жестких и нежестких краевых задач
..pdfчастного решения подучастков (x1 x0
)
Y
,
|
x |
(x |
|
1 |
0 |
(x |
x ) |
2 |
1 |
)
,
,
(
|
|
(x |
|
Y |
|
||
|
|
2 |
|
x |
x |
2 |
|
3 |
|
|
|
).
x1 )
,
|
(x |
x |
) |
Y |
|||
|
3 |
2 |
|
соответствующих
Имеем Также имеем формулу
Y (x) K(x x |
)Y (x |
) Y |
|
(x x |
) |
|
|||||
0 |
0 |
|
|
0 |
|
для отдельного подучастка:
.
Y |
|
(x |
|
||
|
|
j |
x |
) Y |
|
(x |
|
x |
) K (x |
|
|
j |
j |
|||||
i |
|
|
|
i |
|
x jxi ) K (xi xi
t)F (t)dt
.
Можем записать:
|
|
|
|
Y (x1 ) K(x1 x0 )Y (x0 ) Y |
|
(x1 x0 ) |
, |
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
Y (x2 ) K(x2 |
x1 )Y (x1 ) Y |
|
(x2 x1 ) . |
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Подставим |
|
Y (x1 ) в Y (x2 ) и получим: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Y (x |
) K(x |
|
x )[K(x x |
)Y (x |
) Y |
|
(x |
x )] Y |
|
(x |
|
|
x ) |
||||||||||||
2 |
|
|
2 |
||||||||||||||||||||||
2 |
|
|
|
1 |
1 |
0 |
|
0 |
|
|
|
|
1 |
|
0 |
|
|
|
|
|
|
1 |
|||
K(x |
|
x )K(x |
x |
)Y (x |
) K(x |
|
x )Y |
|
(x |
x |
) Y |
|
(x |
|
x ) |
||||||||||
2 |
2 |
|
|
|
2 |
||||||||||||||||||||
|
1 |
|
1 |
0 |
0 |
|
|
|
1 |
|
|
|
1 |
0 |
|
|
|
|
|
|
|
1 |
|||
Сравним полученное выражение с формулой:
.
Y (x |
) K(x |
|
x |
)Y (x |
) Y |
|
(x |
|
x |
) |
2 |
|
2 |
||||||||
2 |
|
0 |
0 |
|
|
|
0 |
|
и получим, очевидно, что:
K(x |
x |
) K(x |
x )K(x |
x |
) |
|
2 |
0 |
2 |
1 |
1 |
0 |
|
и для частного вектора получаем формулу:
|
(x |
x |
) K(x |
x )Y |
Y |
||||
|
2 |
0 |
2 |
1 |
То есть вектора подучастков
|
(x |
x |
) Y |
|
(x |
|
|
|||||
|
|
|
2 |
|||||||||
|
|
|
1 |
|
0 |
|
|
|
|
|
||
Y |
|
(x |
x ),Y |
|
(x |
|
||||||
|
|
|
2 |
|||||||||
|
|
|
|
1 |
|
0 |
|
|
|
|
|
|
x1 ) .
x1 )
не просто
складываются друг с другом, а с участием матрицы Коши
Аналогично запишем |
Y (x3 ) K(x3 |
x2 )Y (x2 ) Y |
|
(x3 |
x |
|
|
|
|
|
подучастка.
2 ) и подставим
сюда формулу для Y (x2
Y (x3 ) K(x3 x2 )[K
)
(
и получим:
x2 x1 )K(x1 x0 )Y (x0 ) K(x2 x1 )Y (x1 x0 ) Y (x2 x1 )]
Y (x3 x2 ) K(x3 x2 )K(x2 x1 )K(x1 x0 )Y (x0 )
K(x3 x2 )K(x2 x1 )Y (x1 x0 ) K(x3 x2 )Y (x2 x1 ) Y (x3 x2 ).
Сравнив полученное выражение с формулой:
Y (x |
) K(x |
x |
)Y (x |
) Y |
|
(x |
x |
) |
|
||||||||
3 |
3 |
0 |
0 |
|
|
3 |
0 |
|
очевидно, получаем, что:
K(x |
x ) K(x |
x |
)K(x |
x )K(x |
x ) |
||
3 |
0 |
3 |
2 |
2 |
1 |
1 |
0 |
и вместе с этим получаем формулу для частного вектора:
Y |
|
(x |
x |
) K(x |
x |
)K(x |
|
x )Y |
|
(x |
x ) K(x |
x |
)Y |
|
(x |
|
x ) Y |
|
(x |
x |
). |
|||
|
2 |
|
|
2 |
|
|||||||||||||||||||
|
|
3 |
0 |
3 |
2 |
|
1 |
|
|
1 |
0 |
3 |
2 |
|
|
|
|
1 |
|
3 |
2 |
|
||
То есть именно так и вычисляется частный вектор – вектор частного |
|
|||||||||||||||||||||||
решения неоднородной системы дифференциальных уравнений, то есть |
|
|||||||||||||||||||||||
так вычисляется, |
например, |
|
частный |
вектор |
|
Y (x |
x ) |
|
на |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
0 |
|
|
|
|
рассматриваемом участке (x3 x0 ) |
через вычисленные частные вектора |
|
||||||||||||||||||||||
31
Y |
|
(x1 x0 ) , |
Y |
|
(x2 |
x1 ) , |
Y |
|
(x3 |
x2 ) |
соответствующих подучастков |
(x1 |
x0 ) , |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
(x2 |
x1 ), |
(x3 |
x2 ) . |
|
|
|
|
|
|
|
|||||
6.4. Применяемые формулы ортонормирования
Взято из [Березин, Жидков]. Пусть дана система линейных алгебраических уравнений порядка n:
A x =b .
Здесь над векторами поставим черточки вместо их обозначения жирным шрифтом.
Будем рассматривать строки матрицы A системы как векторы: ai =( ai1, ai2 ,…, ain ).
Ортонормируем эту систему векторов.
Первое уравнение системы
A
x
=
b
делим на
n |
2 |
|
|
a |
|
k 1 |
1k |
|
|
.
При этом получим:
|
|
с |
x |
+ с |
|
|
|
11 |
1 |
12 |
|
|
|
a |
|
|
|
где c |
= |
1k |
, d |
1 |
|
1k |
|
n |
|
|
|
|
|
2 |
|
||
|
|
|
|
||
|
|
a |
|
|
|
|
|
|
1k |
|
|
|
|
k 1 |
|
|
|
x2
=
+…+ с |
|
x |
n |
= d |
1 |
, c |
|
|
1n |
|
|
1 |
|||
b |
|
|
n |
|
|
|
|
|
|
c12k =1. |
|||||
1 |
|
, |
|||||
n |
2 |
|
k 1 |
|
|
||
|
|
|
|
||||
a |
|
|
|
|
|
|
|
k 1 |
1k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
=(
c11
,
c12
,…,
c1n
),
Второе уравнение системы заменяется на:
с21 x1+ с22 x2 +…+ с2n xn = d 2 , c2 =(
c
21
,
c22
,…,c2n ),
где
c2k
|
|
c2/ k |
|
|
|
d 2/ |
||
= |
|
|
|
, d 2 = |
|
|
|
, |
|
|
|
|
|
|
|||
|
n |
|
|
|||||
|
|
|
|
|
n |
|||
|
|
c2/ 2k |
|
|
|
c2/ 2k |
||
|
|
k 1 |
|
|
|
k 1 |
||
/ |
|
|
|
|
/ |
|
|
|
|
|
|
= a2k -( a2 |
, c1) c1k |
=b2 |
-( a2 |
,c1) d1 . |
|||||||
c2k |
, d 2 |
||||||||||
Аналогично поступаем дальше. Уравнение с номером i примет вид:
сi1 x1+ сi2 x2 +…+ сin xn = d i , ci =( ci1 ,ci2 ,…,cin ),
где
cik
|
|
cik/ |
|
|
|
d i/ |
||
= |
|
|
|
, d i = |
|
|
|
, |
|
|
|
|
|
|
|||
n |
|
|||||||
|
|
|
|
|
n |
|||
|
|
cik/ 2 |
|
|
|
cik/ 2 |
||
|
|
k 1 |
|
|
|
k 1 |
||
32
Здесь (
a
c |
/ |
|
= a |
|
-( a |
, c ) c |
-( a |
,c |
|
) c |
|
-…-( a |
, c |
|
|||||
ik |
ik |
2 |
2k |
i 1 |
|||||||||||||||
|
|
|
|
|
i |
1 |
1k |
i |
|
|
i |
|
|||||||
|
|
|
|
|
/ |
=bi -( ai , c1) d1 |
-( ai |
,c2 ) d 2 -…-( ai , ci 1) |
|||||||||||
|
|
|
d i |
||||||||||||||||
i |
, |
cj |
) – скалярное произведение векторов. |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
) c |
|
|
|
i 1,k |
|
d |
i 1 |
. |
|
|
|
,
Процесс будет осуществим, если система линейных алгебраических уравнений линейно независима.
В результате мы придем к новой системе Cx d , где матрица C будет
с ортонормированными строками, то есть обладает свойством |
C C |
T |
E , |
|
|
|
|
где E - это единичная матрица. |
|
|
|
33
Глава 7. Простейший метод решения краевых задач с жесткими обыкновенными дифференциальными
уравнениями без ортонормирования – метод «сопряжения участков интервала интегрирования», которые выражены матричными экспонентами
Идея преодоления трудностей вычислений путем разделения интервала интегрирования на сопрягаемые участки принадлежит д.ф.- м.н. профессору Ю.И.Виноградову (в том числе на этой идее защищена его докторская физ-мат диссертация), а простейшая реализация этой
идеи через формулы |
теории матриц |
|
|
принадлежит к.ф.-м.н. |
|||||
А.Ю.Виноградову. |
|
|
|
|
|
|
|
|
|
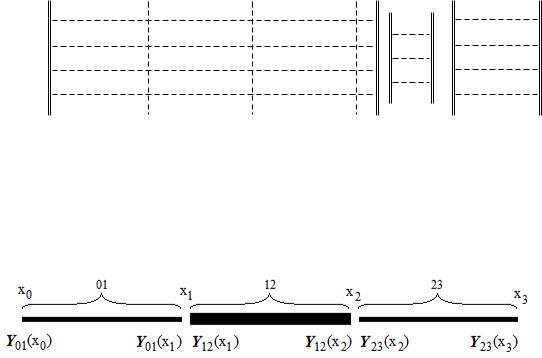
Разделим интервал интегрирования краевой задачи, например, на 3 |
|||||||||
участка. Будем иметь точки (узлы), включая края: |
|
||||||||
|
|
|
x0 , x1 , x2 , x3 . |
|
|
|
|
|
|
Имеем краевые условия в виде: |
|
|
|
|
|
|
|||
|
|
|
UY (x |
) u, |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
VY (x ) v. |
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
Можем записать матричные уравнения сопряжения участков: |
|||||||||
Y (x ) K(x x )Y (x ) Y |
(x x ) , |
||||||||
0 |
0 |
1 |
1 |
|
|
0 |
|
1 |
|
Y (x1 ) K(x1 x2 )Y (x2 ) Y |
|
(x1 x2 ) , |
|||||||
|
|||||||||
Y (x2 ) K(x2 |
x3 )Y (x3 ) Y |
|
(x2 |
x3 ) . |
|||||
|
|||||||||
Это мы можем переписать в виде, более удобном для нас далее: |
|||||||||
EY (x0 ) K(x0 |
x1 )Y (x1 ) Y |
|
(x0 |
x1 ) , |
|||||
|
|||||||||
EY (x ) K(x x )Y (x ) Y |
(x x ) , |
||||||||
1 |
1 |
2 |
2 |
|
|
1 |
2 |
||
EY (x |
) K(x |
2 |
x )Y (x ) Y |
(x |
2 |
x ) . |
|||
2 |
|
3 |
3 |
|
|
|
3 |
||
где E - единичная матрица.
Тогда в объединенном матричном виде получаем систему линейных алгебраических уравнений в следующей форме:
U |
0 |
0 |
E K(x0 x1 ) |
0 |
|
0 |
E |
K (x1 x2 ) |
0 |
0 |
E |
0 |
0 |
0 |
|
0 |
|
|
Y (x0 ) |
|
u |
|
|
|
0 |
|
|
Y (x |
0 |
x ) |
||
|
|
|
|
Y (x1 ) |
|
1 |
|
|
|
0 |
|
|
Y (x x |
) . |
|||
|
|
|
|
Y (x2 ) |
|
1 |
2 |
|
K (x |
2 |
x |
) |
Y (x |
2 |
x |
) |
|
|
3 |
|
Y (x3 ) |
|
3 |
|
||
V |
|
|
|
v |
|
|||
|
|
|
|
|
||||
Эта система решается методом Гаусса с выделением главного элемента.
В точках, расположенных между узлами, решение находиться при помощи решения задач Коши с начальными условиями в i-ом узле:
34
Y (x)
K(x x )Y (x ) Y |
|
(x |
|
|
|||
i |
i |
|
|
xi )
.
Применять ортонормирование для краевых задач для жестких обыкновенных дифференциальных уравнений оказывается не надо, так как на каждом участке интервала интегрирования вычисление каждой матричной экспоненты выполняется независимо и от начальной единичной (ортонормированной) матрицы, что делает ненужным применение ортонормирования в отличие от метода Годунова, что значительно упрощает программирование по сравнению с методом Годунова.
Вычислять матрицы Коши можно не в виде матричных экспонент, а при помощи методов типа Рунге-Кутты от стартовой единичной матрицы, а вектор частного решения неоднородной системы дифференциальных уравнений вычислять на каждом участке методами типа Рунге-Кутты следует от стартового нулевого вектора. В случае применения методов типа Рунге-Кутты оценки погрешностей хорошо известны, что означает, что вычисления можно выполнять с заранее известной точностью.
35
Глава 8. Расчет оболочек составных и со шпангоутами простейшим методом «сопряжения участков интервала
интегрирования»
8.1. Вариант записи метода решения жестких краевых задач без ортонормирования – метода «сопряжения участков,
выраженных матричными экспонентами» - через положительные направления формул матричного интегрирования дифференциальных уравнений
Разделим интервал интегрирования краевой задачи, например, на 3 участка. Будем иметь точки (узлы), включая края:
x0 , x1 , x2 , x3 .
Имеем краевые условия в виде:
UY (x |
) u, |
0 |
|
VY (x ) v. |
|
3 |
|
Можем записать матричные
Y (x ) K(x |
|
1 |
1 |
Y (x |
) K(x |
2 |
2 |
Y (x3 ) K(x3
уравнения сопряжения участков:
|
|
|
(x1 x0 ) , |
||
x0 )Y (x0 ) Y |
|||||
|
|
|
(x2 |
x1 ) , |
|
x1 )Y (x1 ) Y |
|||||
x |
)Y (x |
) Y (x x |
) . |
||
2 |
2 |
|
3 |
2 |
|
Это мы можем переписать в виде, более удобном для нас далее:
EY (x1 ) K(x1 x0 )Y (x0 ) Y |
|
(x1 |
x0 ) , |
|
|
||||
EY (x2 ) K(x2 |
x1 )Y (x1 ) Y |
|
(x2 |
x1 ) , |
|
||||
EY (x3 ) K(x3 |
x2 )Y (x2 ) Y |
|
(x3 |
x2 ) . |
|
||||
где E - единичная матрица.
В итоге получаем систему линейных алгебраических уравнений:
U |
|
|
0 |
|
0 |
|
|
0 |
|
Y (x |
) |
|
|
|
u |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
K(x |
x |
) |
|
E |
|
0 |
|
|
0 |
|
0 |
|
Y |
(x |
|
x |
) |
|
|
|
|
|
|
|
|
|
|
||||||||||
1 |
0 |
|
|
|
|
|
|
|
|
|
Y (x |
) |
|
|
|
1 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
0 |
|
K (x |
|
x ) |
E |
|
0 |
|
1 |
|
Y |
(x |
|
x ) |
||||
|
2 |
|
|
|
|
2 |
||||||||||||
|
|
|
|
1 |
|
|
|
|
|
Y (x |
) |
|
|
|
1 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
0 |
|
|
0 |
K(x |
|
x |
) |
E |
|
2 |
|
Y |
(x |
|
x |
) |
||
|
|
3 |
|
|
|
|
3 |
|||||||||||
|
|
|
|
|
|
2 |
|
|
|
Y (x |
) |
|
|
|
2 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
0 |
|
|
0 |
|
0 |
|
|
V |
|
3 |
|
|
|
|
v |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
.
Эта система решается методом Гаусса с выделением главного элемента. Оказывается, что применять ортонормирование не нужно, так как участки интервала интегрирования выбираются такой длинны, что счет на них является устойчивым.
В точках вблизи узлов решение находится путем решения соответствующих задач Коши с началом в i-ом узле:
Y (x) K(x xi )Y (xi ) Y (x xi ) .
36

8.2. Составные оболочки вращения
Рассмотрим сопряжения участков составной оболочки вращения. Пусть имеем 3 участка, где каждый участок может выражаться
своими дифференциальными уравнениями и физические параметры могут выражаться по-разному – разными формулами на разных участках:
В общем случае (на примере участка 12) физические параметры участка (вектор P12 (x) ) выражаются через искомые параметры системы обыкновенных дифференциальных уравнений этого участка (через вектор Y12 (x) ) следующим образом:
P |
(x) |
12 |
|
M Y |
(x) |
|
12 |
12 |
|
,
где матрица
M12
- квадратная невырожденная.
При переходе точки сопряжения можем записать в общем виде (но на примере точки сопряжения x1 ):
P |
(x ) P |
|
|
01 |
1 |
01 12 |
|
L |
P |
(x ) |
01 12 |
12 |
1 |
,
где P01 12 - дискретное приращение физических параметров (сил,
моментов) при переходе с участка «01» на участок «12», а матрица
L01 12
квадратная невырожденная диагональная и состоит из единиц и минус единиц на главной диагонали для установления правильного соответствия принятых положительных направлений сил, моментов, перемещений и углов при переходе с участка «01» на участок «12», которые могут быть разными (в разных дифференциальных уравнениях разных сопрягаемых участков) – в уравнениях слева от точки сопряжения и в уравнениях справа от точки сопряжения.
Два последних уравнения при объединении образуют уравнение:
M01Y01 (x1 ) P01 12 L01 12 M12Y12 (x1 ) .
В точке сопряжения x2 аналогично получим уравнение:
M12Y12 (x2 ) P12 23 L12 23M23Y23 (x2 ) .
Если бы оболочка состояла бы из одинаковых участков, то мы могли бы записать в объединенном матричном виде систему линейных алгебраических уравнений в следующей форме:
37
U |
|
|
0 |
|
0 |
|
|
0 |
|
Y (x |
) |
|
|
|
u |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
K(x |
x |
) |
|
E |
|
0 |
|
|
0 |
|
0 |
|
Y |
(x |
|
x |
) |
|
|
|
|
|
|
|
|
|
|
||||||||||
1 |
0 |
|
|
|
|
|
|
|
|
|
Y (x |
) |
|
|
|
1 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
0 |
|
K (x |
|
x ) |
E |
|
0 |
|
1 |
|
Y |
(x |
|
x ) |
||||
|
2 |
|
|
|
|
2 |
||||||||||||
|
|
|
|
1 |
|
|
|
|
|
Y (x |
) |
|
|
|
1 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
0 |
|
|
0 |
K(x |
|
x |
) |
E |
|
2 |
|
Y |
(x |
|
x |
) |
||
|
|
3 |
|
|
|
|
3 |
|||||||||||
|
|
|
|
|
|
2 |
|
|
|
Y (x |
) |
|
|
|
2 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
0 |
|
|
0 |
|
0 |
|
|
V |
|
3 |
|
|
|
|
v |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
.
Но в нашем случае оболочка состоит из 3 участков, где средний участок можно считать, например, шпангоутом, выражаемым через свои
дифференциальные уравнения. |
|
|
|
|
Тогда вместо векторов |
Y (x0 ) , |
Y (x1 ) , |
Y (x2 ) , |
Y (x3 ) мы должны |
рассмотреть вектора: |
|
|
|
|
Y |
(x ),Y |
(x ),Y |
(x ),Y |
(x ),Y |
(x ),Y |
(x |
) |
|||||
01 |
0 |
01 |
1 |
12 |
1 |
12 |
2 |
23 |
2 |
23 |
3 |
|
Тогда матричные уравнения
.
EY (x ) K(x |
|
1 |
1 |
EY (x ) K(x |
|
2 |
2 |
EY (x ) K(x |
|
3 |
3 |
UY (x |
) u, |
0 |
|
VY (x ) v. |
|
3 |
|
x0 )Y (x0 ) Y (x1
x1 )Y (x1 ) Y (x2
x2 )Y (x2 ) Y (x3
x0 ) ,
x1 ) ,
x2 )
примут вид:
|
|
|
UY |
(x |
) u, |
|
|
|
||
|
|
|
01 |
|
0 |
|
|
|
|
|
|
|
|
VY |
(x ) v. |
|
|
|
|||
|
|
|
23 |
|
3 |
|
|
|
|
|
EY (x ) K |
01 |
(x x )Y (x ) Y * |
(x x ) , |
|||||||
01 |
1 |
1 |
0 |
|
01 |
0 |
01 |
1 |
0 |
|
M01Y01 (x1 ) P01 12 L01 12 M12Y12 (x1 ) , |
||||||||||
|
|
|
|
|
|
|
|
* |
(x2 |
x1 ) , |
EY12 (x2 ) K12 (x2 x1 )Y12 (x1 ) Y12 |
||||||||||
M12Y12 (x2 ) P12 23 |
L12 23M23Y23 (x2 ) , |
|||||||||
|
|
|
|
|
|
|
|
* |
|
x2 ) . |
EY23 (x3 ) K23 (x3 x2 )Y23 (x2 ) Y23 (x3 |
||||||||||
После перестановки слагаемых получаем:
|
|
|
|
UY |
|
(x |
) u, |
||
|
|
|
|
|
01 |
0 |
|
|
|
|
|
|
|
VY |
|
(x ) v. |
|||
|
|
|
|
|
23 |
3 |
|
|
|
K |
01 |
(x |
x |
)Y |
(x |
) EY |
(x ) |
||
|
1 |
0 |
01 |
0 |
|
|
01 |
1 |
|
M Y |
(x ) L |
M Y |
(x ) |
|
01 01 |
1 |
01 12 |
12 12 |
1 |
Y |
* |
(x |
x |
) |
|
|
|||||
01 |
1 |
|
0 |
|
|
P01 12 |
, |
|
|||
,
K12 (x2 x1 )Y12 (x1 ) EY12 (x2 ) Y12* (x2 x1 ) , M12Y12 (x2 ) L12 23M23Y23 (x2 ) P12 23 ,
K23 (x3 x2 )Y23 (x2 ) EY23 (x3 ) Y23* (x3 x2 ) .
38
В итоге мы можем записать итоговую систему линейных алгебраических уравнений:
|
|
U |
|
|
0 |
|
|
0 |
|
|
0 |
|
|
0 |
|
|
|
0 |
|
Y |
|
(x |
) |
|
|
|
|
u |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
01 |
|
|
* |
|
|
|
|
|||
K |
|
(x |
x |
) |
E |
|
|
0 |
|
|
0 |
|
|
0 |
|
|
|
0 |
|
|
0 |
|
|
Y |
(x |
|
x |
) |
||||||
01 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
01 |
|
|||||||||||||||||
|
1 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Y |
|
(x |
) |
|
|
1 |
0 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
01 |
|
|
|
|
|
|
|
|||
|
|
0 |
|
|
M |
|
L |
|
M |
|
0 |
|
|
0 |
|
|
|
0 |
|
|
1 |
|
|
|
P |
|
||||||||
|
|
|
|
01 |
|
12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
01 12 |
|
|
|
|
|
|
|
|
|
|
|
|
Y |
|
(x |
) |
|
|
|
|
|
01 12 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
* |
|
|
|
|
|||
|
|
0 |
|
|
0 |
K |
|
(x |
|
x ) |
E |
|
|
0 |
|
|
|
0 |
|
|
12 |
1 |
|
|
Y |
(x |
|
x ) |
||||||
|
|
|
|
12 |
2 |
|
|
|
|
|
|
|
|
|
|
2 |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
Y |
|
(x |
) |
|
|
12 |
|
1 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
0 |
|
|
0 |
|
|
0 |
|
|
M |
|
L |
|
M |
|
|
0 |
|
12 |
2 |
|
|
|
P |
|
||||||||
|
|
|
|
|
|
|
|
12 |
|
23 |
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
12 23 |
|
|
|
|
Y |
|
(x |
) |
|
|
|
|
|
12 23 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
23 |
|
|
* |
|
|
|
|
|||
|
|
0 |
|
|
0 |
|
|
0 |
|
|
0 |
K |
|
(x |
|
x |
) |
E |
|
|
2 |
|
|
Y |
(x |
|
x |
) |
||||||
|
|
|
|
|
|
|
|
23 |
3 |
|
|
|
|
|
|
23 |
3 |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
Y |
|
(x |
) |
|
|
|
2 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
23 |
|
|
|
|
|
|
|
|||
|
|
0 |
|
|
0 |
|
|
0 |
|
|
0 |
|
|
0 |
|
|
|
V |
|
|
3 |
|
|
|
|
|
v |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Эта система решается методом Гаусса с выделением главного элемента.
В точках, расположенных между узлами, решение находиться при помощи решения задач Коши с начальными условиями в i-ом узле:
Y (x) K(x xi )Y (xi ) Y (x xi ) .
Применять ортонормирование для краевых задач для жестких обыкновенных дифференциальных уравнений оказывается не надо.
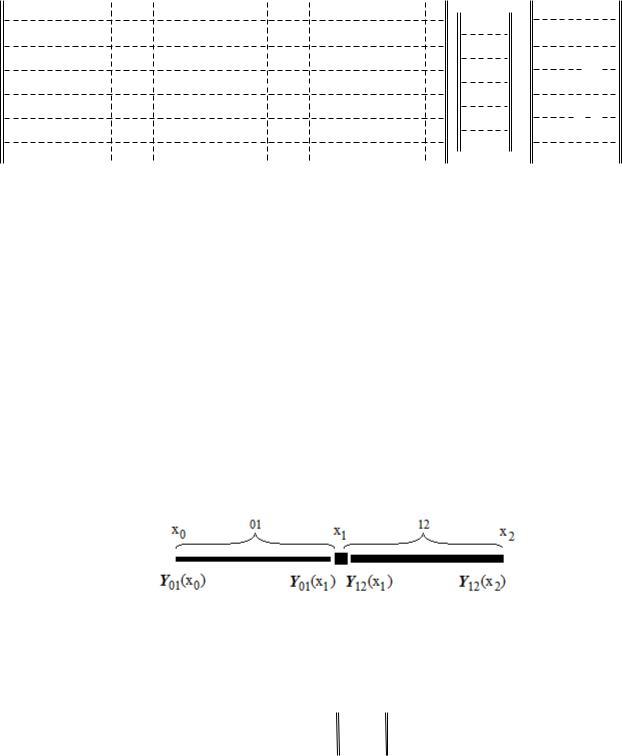
8.3. Шпангоут, выражаемый не дифференциальными, а алгебраическими уравнениями
Рассмотрим случай, когда шпангоут (в точке
x1
) выражается не через
дифференциальные уравнения, а через алгебраические уравнения.
Выше мы записывали, что:
P |
(x ) P |
L |
P |
(x ) |
|
01 |
1 |
01 12 |
01 12 |
12 |
1 |
Можем представить вектор в виде:
P |
(x |
01 |
1 |
P01(x1)
) силовых факторов и перемещений
R01(x1) ,
S01(x1)
где
R |
(x ) |
01 |
1 |
- вектор перемещений,
S |
01 |
(x ) |
|
1 |
- вектор сил и моментов.
Алгебраическое уравнение для шпангоута:
GR S ,
где G – матрица жесткости шпангоута, R – вектор перемещений шпангоута, S – вектор силовых факторов, которые действуют на шпангоут.
39
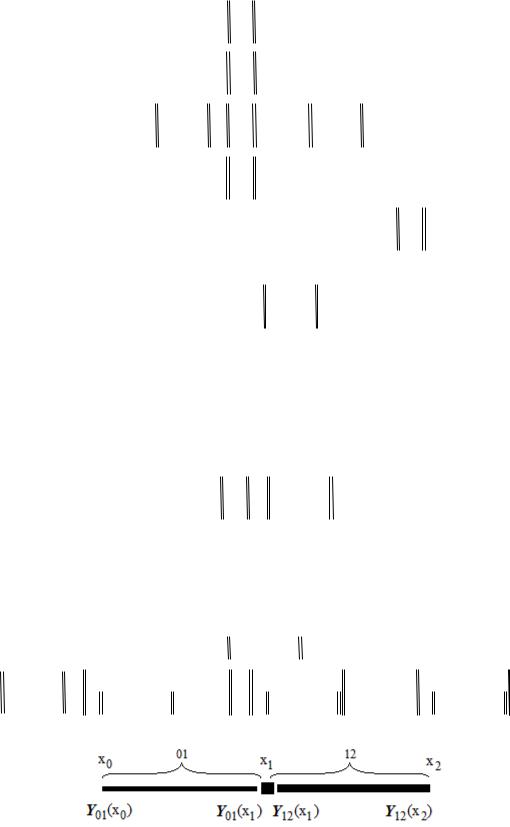
В точке шпангоута имеем:
R 0, S GR ,
то есть нет разрыва в перемещениях R 0 вектор силовых факторов S GR , который моментов слева плюс сил и моментов справа от
, но есть результирующий складывается из сил и точки шпангоута.
P01 |
(x1 ) |
R |
L01 12 P12 (x1 ) , |
|
|
|
|
|
||||||||
S |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P01 |
(x1 ) |
0 |
L01 12 P12 (x1 ) |
, |
|
|
|
|
|
|||||||
GR |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
(x ) |
|
0 |
|
R |
(x ) |
|
|
|
|
|
|||||
|
01 |
|
|
|
1 |
|
|
L01 12 |
12 |
1 |
|
, |
|
|
|
|
S |
|
(x ) |
GR |
S |
(x ) |
|
|
|
|
|||||||
01 |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
1 |
|
|
|
12 |
1 |
|
|
|
|
|
|
|
M01Y01 |
(x1 ) |
0 |
L01 12 M12Y12 (x1 ) |
, |
|
|
||||||||||
GR |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M01Y01 (x1 ) g |
* |
L01 12 M12Y12 (x1 ) , где |
|
g |
* |
|
0 |
, |
||||||||
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
GR |
|
что справедливо, если мы не забываем, что в данном случае имеем:
|
|
R |
(x ) |
|
|
P01 |
(x1 ) |
|
01 |
1 |
, |
S |
|
(x ) |
|||
|
|
01 |
|
||
|
|
|
1 |
|
|
то есть вектор перемещений и силовых факторов составляется |
|||||
сначала из перемещений (выше) |
R01(x1) , а потом из силовых факторов |
||||
(ниже) S01(x1) .
Здесь необходимо вспомнить, что вектор перемещений выражается через искомый вектор состояния Y01 (x1 ) :
R |
(x ) |
01 |
1 |
|
|
|
|
|
|
|
g |
* |
|
0 |
|
|
0 |
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
GR |
|
GR |
|
(x ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
01 |
1 |
|
|
|
|
P (x ) |
|
R (x ) |
|
M Y (x ) |
M pY (x ) |
|
M p |
||||||||||
|
|
|
|||||||||||||||
|
|
01 |
1 |
|
|
11 |
|||||||||||
01 |
1 |
|
S |
|
(x ) |
|
01 |
01 |
1 |
|
|
01 |
1 |
|
|
M p |
|
|
|
|
01 |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
21 |
|
где для удобства было введено переобозначение Тогда можем записать:
R01 (x1 ) |
p |
p |
Y01 (x1 ) , |
M11 |
M12 |
M12p M 22p
M 01

 Y01
Y01
M
(x1 ) ,
p |
. |
|
g* |
0 |
|
|
0 |
|
|
0...0 |
Y (x ) |
0 |
Y (x ) |
|
|
G M11p M12p |
|
G M11p M12p |
G M11p M12p |
|||||
|
GR (x ) |
|
Y01 (x1 ) |
|
01 1 |
01 1 |
||||
|
01 |
1 |
|
|
|
|
|
|
|
|
Запишем матричные уравнения для этого случая:
40