

книги / Теория автоматического управления. Дискретные системы
.pdfили полные суммы
n |
|
σ0[n]=σ[n]+ f [n]=σ[n +1]=∑ f [m] . |
(2.3) |
m=0
В качестве аналогов дифференциальных уравнений в дискретных САУ рассматриваются уравнения в конечных разностях.
При использовании обратных разностей уравнение в конечных разностях будет иметь вид
b0 m y[n]+b1 m−1 y[n]+...+bm y[n]= f [n] .
С учетом (2.1) последнее выражение приобретает вид
a0 y[n]+a1 y[n −1]+...+am y[n −m]= f [n] ,
где коэффициенты уравнения определяются выражениями
k |
(m −v)! |
|
|
|
am−k =∑(−1)m−k bvCmk−−vv , Cmk−−vv = |
. |
|||
(k −v)!(m −k)! |
||||
v=0 |
|
|||
2.2. Преобразование Лапласа дискретных функций
Введем в рассмотрение дискретных сигналов понятие импульсной функции (см. рис. 2.1):
∞ |
|
f (t) =∑ f [nT ]δ[t −nT ], |
(2.4) |
n=0
являющейся последовательностью модулированных по амплитуде импульсов на выходе идеального импульсного элемента.
Хотя эта функция имеет бесконечно большие ординаты, мы можем считать их пропорциональными ординатам f[nT] с коэффициентом пропорциональности 1/γT, где γ – скважность бесконечно тонкого прямоугольного импульса.
Преобразование Фурье (частотный спектр) для одного импульса δ(t – nT) равно e–jωnT, поэтому спектр определяется, как
21
|
∞ |
|
|
|
F* ( jω)=∑f [nT ]e− jωnT . |
(2.5) |
|
|
n=0 |
|
|
Применим к (2.4) преобразование Лапласа: |
|
||
∞ |
∞ ∞ |
|
|
F* (p)=∫ f * (t)e− pt dt =∑∫ f [nT ]δ(t −nT )e− pt dt. |
(2.6) |
||
0 |
0 |
0 |
|
Вынесем f[nT]e–pt за знак интеграла, заменив дискретными значениями, так как только при этих значениях δ(t) отличается от нуля:
∞ |
∞ |
|
F* (p)=∑f [nT ]e− pnT ∫δ(t −nT )dt. |
(2.7) |
|
n=0 |
0 |
|
Интеграл от δ-функции в бесконечных пределах равен 1, поэтому имеем
∞ |
|
F* (p)=∑f [nT ]e− pnT . |
(2.8) |
n=0
Спектр и изображения сигнала f*(t) в выражениях (2.5) и (2.8) определяются дискретными значениями f[nT].
В приведенных формулах, как и в случае непрерывного преобразования Лапласа, комплексная величина p = c + jω, где с – абсцисса абсолютной сходимости. Если с < ∞, то ряд, определяемый формулой (2.8), сходится и решетчатой функции соответствует ее изображение. Процедура определения F*(p) по (2.8) называется
дискретным преобразованием Лапласа (D-преобразованием).
Введением новой переменной z = epT в уравнение (2.8) осуществляется переход от дискретного к Z-преобразованию Лапласа для дискретных значений сигнала f[nT] = f[n]:
∞ |
|
F (z)=∑f [n]z−n . |
(2.9) |
n=0
Преобразование (2.8) существует для тех значений z, которые удовлетворяют условию | z | > R = 1/ρ, где ρ – радиус сходимости ряда.
22
Процедуры определения значений D- и Z-преобразований Лапласа символически отображаются, как D{f[nT]} = F*(p) и Z{f[n]} = F(z).
Решетчатые функции в общем случае могут быть смещенными во времени от моментов квантования, которые выражаются f[(n + ε)T] или f[n + ε], где 0 ≤ ε ≤ 1, тогда преобразование называется моди-
фицированным или смещенным.
Z-преобразование смещенной решетчатой функции в этом случае будет иметь вид
∞ |
|
F(z, ε) =∑f [(n +ε)T ]z−n . |
(2.10) |
n=0
Пример 2.1. Определить Z-изображение единичной ступенчатой решетчатой функции f[nT] при T = 1 c.
1(t) – огибающая решетчатой функции, для которой непре-
рывное преобразование Лапласа L{1(t)}= 1p .
Решетчатая функция f [n]=
∞ |
|
|
|
|
|
|
|
|
|
|
|
=1[n]=∑δ(t −nT ), |
тогда D- и Z- |
|
|
|
|
|
|
|
|||
n=0 |
|
|
|
|
|
|
|
|
|
|
|
изображения имеют вид |
|
|
|
|
|
|
|
||||
|
∞ |
|
∞ |
|
|
|
|
|
|
|
|
F (p)=∑e−nTp ; |
F (z)=∑z−n . |
|
|
|
|
|
|
|
|||
|
n=0 |
|
n=0 |
|
|
|
|
|
|
|
|
Используем формулу суммирования убывающей геометриче- |
|||||||||||
ской прогрессии |
|
|
|
|
|
|
|
|
|
||
|
|
n |
|
−(n+1) |
) |
|
|
az(1−z |
−(n+1) |
) |
|
|
|
∑az−k = |
a(1−z |
|
= |
|
. |
||||
|
−1 |
|
|
z −1 |
|
||||||
|
|
k=0 |
|
1−z |
|
|
|
|
|
||
Для |
бесконечно убывающей |
|
прогрессии n → ∞, тогда |
||||||||
∞ |
az |
|
|
|
|
|
|
|
|
|
|
∑az−k = |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
k=0 |
z −1 |
|
|
|
|
|
|
|
|
|
|
Знаменатель прогрессии q = z–1. Тогда для |z| > 1
23
∞ |
|
z |
|
|
F(z) = ∑f [n]z−n =1+ z−1 + z−2 +... = |
. |
|||
|
||||
n=0 |
|
z −1 |
||
Пример 2.2. Задана решетчатая экспонента |
f (nT ) =e−αnT , где α – |
|||
постоянная, в общем случае, комплексная величина, T = 1 c. Проделав действия, аналогичные действиям в примере 2.1, получим
изображение по Лапласу непрерывной функции |
L{e−αt}= |
|
1 |
. |
||||||||||||||||||
(p |
+α) |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∞ |
|
|
|
|
|
|
Изображение решетчатой функции f [n]=∑e−αnT δ(t −nT ) в виде |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n=0 |
|
|
|
|
|
|
∞ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∞ |
|
|
|
F (p)=∑e−αnT e−nTp |
и вформе Z-преобразования F |
(z)=∑e−αnT z−n . |
||||||||||||||||||||
n=0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n=0 |
|
|
||
Для |z| > e–αT имеем |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
F (z) =1+ z |
−1 |
e |
−αT |
+ z |
−2 |
e |
−2αT |
+...= |
|
1 |
= |
|
1 |
= |
|
|
||||||
|
|
|
|
|
1−q |
1−z |
−1 −αT |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e |
|
|
|||||
= |
|
1 |
= |
|
|
|
z |
|
= |
|
z |
, |
|
|
|
|
|
|
|
|
|
|
1− |
e−αT |
|
z −e−αT |
z −d |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где d = e–αT.
В табл. 2.1 приведены непрерывное и Z-преобразования Лапласа типовых непрерывных функций.
|
|
|
|
|
|
Таблица 2 . 1 |
||
р-, z-Изображения типовых непрерывных функций |
||||||||
|
|
|
|
|
|
|
|
|
f(t) |
|
F(p) |
|
F(z) |
||||
1приt |
= 0 |
|
|
|
|
|
|
|
|
|
|
|
– |
1 |
|
||
δ(t)= |
|
|
|
|
||||
0 приt |
=kT , k ≠T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1приt = kT |
|
|
|
|
|
|
||
|
|
|
|
– |
|
z–k |
||
δ(t −kT )= |
|
|
|
|
||||
0 приt ≠kT |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
1(t) |
|
|
1 |
|
|
z |
||
|
|
p |
|
|
|
|||
|
|
|
z −1 |
|||||
|
|
|
|
|
||||
24
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Окончание |
табл. 2 . 1 |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
f(t) |
|
|
|
|
|
F(p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F(z) |
|
|
|
|
|
|
|
|||||||||
|
|
|
t |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Tz |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
p2 |
|
|
|
|
|
|
|
|
|
|
|
|
( |
z |
)2 |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
−1 |
|
|
|
|
|
|
|
|||
|
|
1 |
t2 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T 2 z(z +1) |
|
|
|
|||||||||||||||||
|
|
2 |
|
|
|
|
|
|
p3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( |
|
|
)3 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2! z −1 |
|
|
|
|
|
|
|||||||||
|
|
e–at |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
, d =e−aT |
|
|
|||||||||||||||||
|
|
|
|
|
|
|
p +a |
|
|
|
|
|
|
|
|
|
|
|
z −d |
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
z(1−d ) |
|
|
|
, |
|
|
||||||||||
|
1 – e–at |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(z −1)(z −d ) |
|
|
|||||||||||||||||||
|
|
|
|
p(p +a) |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d =e−aT |
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
b −a |
|
|
|
|
|
|
|
|
|
z |
− |
|
z |
|
|
, |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
e–at – e–bt |
|
|
|
|
|
|
|
|
|
|
|
z −d1 |
|
|
|
z −d2 |
|
|
|
||||||||||||||||||||
|
(p +a)(p +b) |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
d |
|
|
=e−aT |
, d |
|
=e−bT |
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
sinωt |
|
|
|
|
|
|
ω |
|
|
|
|
|
|
|
|
|
|
|
zsinωT |
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
p2 +ω2 |
|
|
|
|
|
|
|
z2 −2zcosωT +1 |
|
|
||||||||||||||||||||||||
|
cosωt |
|
|
|
|
|
|
p |
|
|
|
|
|
|
|
|
|
|
z2 −cosωT |
|
|
|
|||||||||||||||||
|
|
|
|
|
p2 +ω2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
z2 −2zcosωT +1 |
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
ω |
|
|
|
|
|
|
|
|
|
|
|
zd sinωT |
|
|
, |
|||||||||||||
e |
−at |
sinωt |
|
|
|
|
|
|
|
|
|
|
|
z2 |
−2zd cosωT +d 2 |
||||||||||||||||||||||||
|
|
(p +a)2 + |
ω2 |
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
d =e−aT |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
p +a |
|
|
|
|
|
|
|
|
|
z2 − zd cosωT |
|
, |
|||||||||||||||||
−at |
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
2 |
−2zd cosωT +d |
2 |
||||||||||||||||||||||
e |
|
|
cosωt |
|
|
(p +a)2 + |
ω2 |
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
d =e−aT |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
2.3.Основные свойства и теоремы Z-преобразования
1.Свойство линейности. Изображение линейной комбинации решетчатых функций равно той же линейной комбинации их изображений:
25

N |
N |
f [n]=∑cv fv [n] z→F(z) =∑cv Fv [z]. |
|
v=1 |
v=1 |
2. Теорема запаздывания (сдвиг на целое число тактов впра-
во). Пусть имеем смещенную решетчатую функцию f[n–m], запаздывающую на целое число тактов m. Если обозначить n–m = r, то
∞ |
∞ |
−1 |
Z{f[n–m]}= ∑ f [r]z−(m+r ) = z−m [∑f [r]z−r + ∑ f [r]z−r ]= |
||
r=−m |
r=0 |
r=−m |
m
= z−m[F(z) +∑f [−r]zr ].
r=1
Если исходная решетчатая функция f[n] равна нулю при отрицательных значениях аргумента, то Z{f[n–m]} = z −m F(z) .
Пусть смещение решетчатой функции в сторону опережения на m тактов, тогда, проведя замену n + m = r, получим Z-преобразо- вание:
∞ |
∞ |
m−1 |
|
|
Z{ f [n +m]} =∑f [r]zm−r = zm |
∑f [r]z−r −∑f [r]z−r |
|
= |
|
r=m |
r=0 |
r=0 |
|
|
m−1
= zm F (z)−zm ∑f [r]z−r .
r=0
Второе слагаемое в правой части полученного уранения обращается в нуль, если f[n]≡0 при n=0,1,…, m–1.
3. Изображение разностей. Для первой обратной разности
Z{ f [n]}=Z{ f [n]− f [n−1]}=
=F(z) −z−1F(z) −z−1 f [−1]z = z −z 1F(z)− f [−1],
так как для отрицательных аргументов решетчатая функция тожде-
ственно равна нулю, то Z{ f [n]}= z −z 1F(z), также и для k-й об-
ратной разности, когда
26

f[n] ≡ 0 при n<0
Z{ k f [n]}= z −z 1 k F(z) .
Для прямых разностей может быть записано похожее предыдущему выражение при равенстве нулю решетчатой функции в первых k-х точках
Z{∆ kf[n]} = (z–1)kF(z).
4. Изображение сумм. Составим прямую разность для неполной суммы
∆σ[n] = σ[n+1] – σ[n] = f[n].
На основании изображения прямой разности имеем
Z{σ[n]} = F(z)/(z–1),
для k-кратного суммирования Z{σ k[n]}=F(z)/(z–1)k. Изображение k-кратной полной суммы
Z{σ0k[n]}=(z/(z–1))kF(z).
5. Начальное значение решетчатой функции. Если решетча-
тая функция f[n] имеет преобразование F(z) и предел этой функции при z→∞ существует, то
f [0]=lim f [n]=lim F (z).
n→0 z→∞
Доказательство находится из определения Z-преобразования:
F(z)= f(0)+ f(T)/z+f(2T)/z2+ f(3T)/z3+…,
откуда вытекает очевидное вышеприведенное равенство пределов.
6. Конечное значение решетчатой функции. При условии,
что предел f[n] существует и преобразование F[z] не имеет полюсов |z|≥1, имеем
27
lim f [n]=lim(z −1)F (z). |
|
|
|
|
n→∞ |
z→1 |
|
|
|
Для доказательства рассмотрим преобразование |
|
|
||
Z {[f (i +1)]−[f (i)]}=lim ∑f (i +1)z−i |
−∑f (i)z−i |
= |
||
|
n |
n |
|
|
|
n→∞ i=0 |
i=0 |
|
|
=limn→∞ − f (0)+ f (1)(1−z−1 )+ f (2)(z−1 −z−2 )+...
...+ f (n)(z−n+1 −z−n )+ f (n +1)z−n .
Тогда
z→1 |
{[ |
] |
[ |
]} |
n→∞[ |
] |
limZ |
|
f (i +1) − |
|
f (i) |
=lim |
f (n +1)− f (0) , |
при условии, что предел в правой части существует. Кроме того, по теореме о сдвиге
Z {[f (i +1)]−[f (i)]}= z[F (z)− f (0)]−F (z)=(z −1)F (z)−zf (0).
Полагая в этом выражении z→1 и приравнивая его предыдущему, имеем
|
lim[f (n +1)− f (0)]=lim[(z −1)F (z)−zf (0)], |
|
|
n→∞ |
z→1 |
или lim f [n]=lim(z −1)F (z), |
при условии, что предел в левой части |
|
n→∞ |
z→1 |
|
существует.
Как и в случае теоремы о конечном значении в непрерывном преобразовании Лапласа, предел в правой части может дать неверное значение, если предел в левой части не существует.
28
2.4. Вычисление решетчатых функций
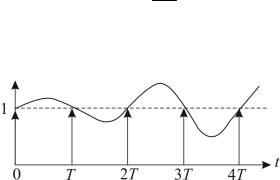
Процедура обратного преобразования Лапласа для определения оригинала непрерывной функции по ее изображению является однозначной, чего нельзя сказать о дискретных (решетчатых) функциях. Если для функции f(t) имеется изображение F(z), то обратное Z-преобразование не обязательно равно f(t). Корректный результат обратного Z-преобразования функции F(z) есть f[nT], который равен f(t) только в моменты квантования t=nT. Это ограничение необходимо учитывать при применении метода. На рис. 2.2 приведена иллюстрация факта, что для Z-преобразования единич-
ной ступенчатой функции, равной z z−1 и соответствующей после-
довательности единичных импульсов, обратное Z-преобразование может быть любой функцией, значения которой равны единице в моменты t=0, T, 2T,…
Рис. 2.2. Неоднозначность обратного Z-преобразования
Для вычисления решетчатой функции по ее изображению могут быть использованы методы: обратное преобразование Z-изобра- жения решетчатой функции; разложение формул; разложение
встепенной ряд; разложение на простые дроби.
1.Обратное преобразование Z-изображения решетчатой функции. Данная процедура определения оригинала решетчатой
функции заключается в определении последовательности f[n] и обозначается как Z –1{F(z)}.
Для решения данной задачи используется формула обраще-
ния:
29

|
|
|
|
|
|
c+ j |
π |
|
|
|
|
|
|
|
[ |
|
] |
|
T |
T |
( |
|
pT ) |
|
|
||
|
|
|
∫ |
|
pnT |
|
|||||||
f |
|
n |
|
= |
|
|
F |
|
e |
e |
|
dp. |
|
|
|
j2π |
|
|
|||||||||
|
|
|
|
|
c− j |
π |
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||
Так как z = exp(pT) и dz = Tzdp, то формула обращения примет вид
|
T |
|
l |
|
f [n]= |
F (z)zn−1dz =∑Resv F (z)zn−1. |
|||
j2π ∫ |
||||
|
v=1 |
|||
Интегрирование ведется по окружности с центром в начале
координат и радиусом R > |zν|max, где ν=1,2,…,l; zν – полюсы функции F(z).
Полученное выражение для практического использования оказывается сложным в общем случае полюсов функции F(z).
В частном случае простых полюсов значение интегрального вычета в точке z=zν определяется по формуле
Resv F (z)zn−1 = zlimz (z −zv )F (z)zn−1.
→ v
Пример 2.3. Пусть имеем изображение F(z) = |
(1−d)z |
. По- |
|
(z −1)(z −d) |
|||
|
|
люсы функции F(z) простые и имеют значения z = 1 и z = d = e–αT. Получим выражение решетчатой функции
|
l |
|
|
l |
|
|
|
|
|
|
f [n]=∑Resv F (z)z−1 =∑lim (z −zv )F (z)zn−1 = |
|
|||||||||
|
v=1 |
|
v=1 |
z→z |
v |
|
|
|
|
|
|
|
|
|
|
|
|
||||
= lim (z −z |
) |
z(1−d ) |
z + lim (z −z |
|
) |
z(1−d ) |
z = |
|||
(z −1)(z −d ) |
|
(z −1)(z −d ) |
||||||||
z→z2 |
1 |
|
|
z→z2 |
2 |
|
|
|||
=1−d n =1−e−αn .
2. Формулы разложения. Пусть изображение представляет собой отношение многочленов
F (z)= BA((zz)) = zAB0((zz)),
30