

книги / Теория автоматического управления. Дискретные системы
.pdf7.2.5. Синтез цифровой обратной связи
Требуемое качество дискретной системы управления можно обеспечить путем включения цифрового регулятора в цепь обратной связи, как показано на рис. 7.4, г. В качестве регулятора могут быть использованы, например, цифровые датчики с цифроаналоговыми преобразователями.
Пусть в дискретной системе, как показано на структурной схеме рис. 7.4, г, применена цифровая обратная связь, причем ее передаточную функцию примем одинаковой структуры с цифровым последовательным регулятором, полученным в результате синтеза с заданной колебательностью системы в подразд. 7.2.2.
Моделирование системы выполнено по нижеприведенному скрипту:
num=[100];den=[0.1 1 0]; sys=tf(num,den); sys1=c2d(sys,0.01,'zoh') sys2=tf([-4.33 4.33],[1 0],0.01); sys7=feedback(sys1,-sys2) zero(sys7),pole(sys7) sys9=feedback(sys7,1) zero(sys9),pole(sys9) [y,t]=step(sys9,0:0.01:0.25);
plot(t,y),title('h(t) системы с цифровой обратной связью') xlabel('время,с'),ylabel('h(t)')
grid
С целью сохранения порядка астатизма в системе при охвате объекта обратной связью регулятор должен быть дифференцирующего типа. С учетом передаточного коэффициента типового регулятора для обратной связи, вычисленного по (7.25), D-регулятор принят с передаточной функцией, как показано в вышеприведенном скрипте с передаточной функцией
Wk (z)= |
4,33(z −1) |
. |
|
||
|
z |
|
141
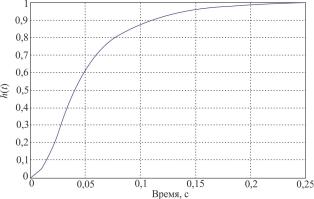
Рис. 7.13. Переходная характеристика с цифровой обратной связью
Переходная характеристика системы по результатам моделирования приведена на рис. 7.13, которая имеет в отличие от рис. 7.7 монотонный характер, при этом наблюдается незначительное увеличение времени регулирования (с 0,075 до 0,13 с).
7.3. Синтез цифровых систем с апериодическим переходным процессом
К большинству систем управления в числе основных показателей качества предъявляется требование обеспечения быстродействия. Такой класс систем управления называется системами с ми-
нимальным временем переходного процесса.
В основу синтеза таких систем управления положен принцип компенсации нулей и полюсов передаточной функции управляемого процесса полюсами и нулями цифрового регулятора с добавлением полюсов и нулей в соответствующих местах на z-плоскости.
При малых значениях периода квантования дискретный процесс практически совпадает с непрерывным, «пульсаций» в промежутках между моментами квантования нет. Такой процесс обычно называют апериодическим.
142
Пусть передаточная функция замкнутой системы с последовательным регулятором имеет вид
Wз (z)= |
|
|
WР (z)WО (z) |
, |
(7.26) |
|
1 |
+WР (z)WО (z) |
|||||
|
|
|
||||
где WО(z) – передаточная функция управляемого процесса. Разрешаем уравнение (7.26) относительно передаточной
функции регулятора:
|
|
|
|
|
|
|
|
WР |
(z)= |
|
|
|
1 |
|
|
Wз (z) |
|
|
, |
|
(7.27) |
||||
|
|
|
|
|
|
|
|
WО (z)1 |
−Wз (z) |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Запишем z-изображение ошибки регулирования в виде |
|
||||||||||||||||||||||||
|
( |
|
) |
|
( |
|
) |
|
( |
|
) |
|
( |
|
) |
з ( |
) |
|
|
|
V (z) |
|
|||
E |
|
z |
|
=V |
|
z |
|
−Y |
|
z |
|
=V |
|
|
z |
1−W |
z = |
1 |
+WР (z)WО (z) |
. (7.28) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Представим z-преобразование входного сигнала в виде функ-
ции:
V (z)= |
|
A(z) |
|
, |
(7.29) |
||
( |
|
−1 |
) |
N |
|||
|
1− z |
|
|
|
|
||
|
|
|
|
|
|
||
где N – положительное целое число;
A(z) – полином от переменной z−1, не имеющий нулей z=1. Например, для единичной ступенчатой входной функции A(z)=1
иN=1; для единичной линейной входной функции A(z)=Tz–1и N=2
ит.д. В общем случае выражение (7.29) соответствует входным сигналам типа t N–1.
Приравняем к нулю установившуюся ошибку:
lime(kT )= lim 1− z−1 |
) |
E(z)= |
|
||||||||||||
k →∞ |
−1 |
|
z→1 ( |
|
|
|
( |
) |
|
|
|||||
|
|
A |
( |
z |
) |
|
|
|
з |
|
(7.30) |
||||
= lim 1− z |
|
|
|
1 |
−W |
|
|
z |
= |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
0. |
||
|
|
|
|
( |
|
|
) |
|
|
|
|||||
z→1 ( |
|
) |
|
|
|
−1 |
N |
|
|
|
|||||
|
|
|
|
1− z |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
143 |
Поскольку полином A(z) не содержит нулей z=1, то необходимым условием равенства нулю установившейся ошибки является
наличие множителя (1− z−1 )N в выражении 1−Wз (z). Следовательно, последнее должно иметь вид
з |
(z)= |
( |
− z−1 |
) |
N F (z). |
|
1−W |
1 |
|
(7.31) |
где F(z) – полином от переменной z–1.
Разрешая уравнение (7.31) относительно 1−Wз (z), получим
1 |
−W |
(z)= |
1− z−1 |
) |
N |
F (z) |
. |
(7.32) |
( |
|
|
||||||
|
з |
|
zN |
|
|
|
||
Так как F(z) является полиномом от z–1, то она имеет полюсы только z=0. Таким образом, выражение (7.32) показывает, что характеристическое уравнение системы с нулевой установившейся ошибкой имеет вид
zp=0, |
(7.33) |
где p – положительное целое число, причем p ≥ N.
Изображение ошибки в системе после подстановки (7.31) в (7.28) будет
E(z)=A(z)F(z). (7.34)
Как уже было отмечено, поскольку A(z) и F(z) являются полиномами от z–1, то E(z), определяемое выражением (7.34), будет иметь конечное число членов при разложении его в ряд по отрицательным степеням z. Поэтому, если характеристическое уравнение цифровой системы управления имеет вид (7.33), т.е. все его корни нулевые, то сигнал ошибки будет сводиться к нулю за конечное число периодов квантования.
В общем случае F(z) может иметь вид отношения полиномов
от z:
144

F (z)= |
Fn (z) |
, |
(7.35) |
|
Fd (z) |
||||
|
|
|
где Fn (z) и Fd (z) – полиномы, не содержащие полюсов и нулей
z=1, а также полюсов, для которых |z|>1.
Тогда характеристическое уравнение будет иметь вид
z p Fd (z)= 0. |
(7.36) |
При синтезе цифровых регуляторов любым методом требуется обеспечение их физической реализуемости. В данном случае передаточная функция регулятора находится по (7.27), при этом накладываются на нее ограничения: если передаточные функции управляемого процесса и замкнутой системы могут быть разложены вряд
WО (z)= fn z−n + fn+1zn−1 +....
Wз (z)= gk z−k + gk +1g−k −1 +...,
где n ≥ 0 и k ≥ 0.
Подставив эти выражения в (7.27), получим передаточную функцию регулятора:
gk z−k + gk +1g−k −1 +... |
|
WР (z)= (fn zn + fn+1zn−1 +...)(1− gk z−k + gk +1g−k −1 +...)= |
(7.37) |
= dk −n z−(k −n) + dk −n+1z−(k −n+1) +....
Таким образом, для физической реализуемости регулятора необходимо выполнение условия k ≥ n. При этом условии выбор функции F(z) должен проводиться по уравнению (7.31). В действительности принимают простейшую функцию, не противоречащую условиям (7.31) – F(z)=1 для всех видов простейших типовых входных воздействий.
Тогда с учетом (7.32) будем иметь функции (1−Wз (z)):
• при единичном ступенчатом входном воздействии (N=1) – z–1;
145
•при единичном линейном входном воздействии (N=2) –
–2z–1 – z–2;
•при параболическом входном воздействии (N=3) – 3z–1 – 3z–2 +
+ z–3.
Из метода синтеза регуляторов непрерывных систем известна недопустимость полной компенсации нулей и полюсов передаточной функции управляемого процесса по соображениям их помехозащищенности и устойчивости.
Рассмотренный метод является примером получения идеального апериодического процесса, который относится к определенному закону изменения входного воздействия и предполагает неизменность параметров системы.
Реальные управляемые процессы могут предусматривать любой закон изменения входного сигнала и наличие на единичной окружности или вне ее нулей или полюсов передаточной функции. Кроме того, системы с апериодическим переходным процессом очень чувствительны к изменениям параметров.
Рассмотренный метод компенсации нулей и полюсов управляемого процесса практически осуществляется введением весового коэффициента в желаемую передаточную функцию замкнутой
системы Wз (z), что соответствует введению дополнительного по-
люса в передаточную функцию замкнутой системы. Модифицируем функцию
1−W |
(z)= |
1−Wз (z) |
, |
(7.38) |
|
1−cz−1 |
|||||
зм |
|
|
|
где c – полюс, значения которого ограничены диапазоном от –1 до
1из условия устойчивости функции Wзм (z).
Впроцессе синтеза цифрового регулятора определяется значение с, обеспечивающее удовлетворительные показатели качества переходного процесса (наряду с минимальной длительностью допустимое перерегулирование).
146
Пример 7.4. Пусть управляемый процесс в цифровой системе с экстраполятором нулевого порядка описывается передаточной
функцией WО (p)= |
100 |
|
, |
который в форме Z-преобразования |
||
p(0,1p |
+1) |
|||||
|
|
|
|
|||
WО (z)= |
0,04837z + 0,4679 |
(см. пример 7.1). |
||||
(z −1)(z −0,9048) |
||||||
|
|
|
|
|||
Так как объект имеет нуль вне единичной окружности и один нулевой полюс, синтез регулятора проведем с введением весового коэффициента.
Принимая функцию F(z)=1 при единичном ступенчатом воздействии получим модифицированную желаемую передаточную функцию замкнутой системы по уравнению (7.38):
1−Wзм (z)= 1−− z−−11 . 1 cz
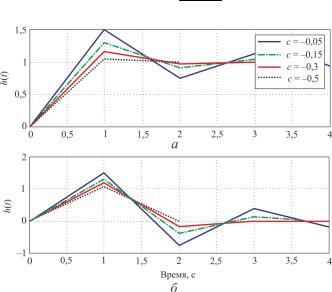
Рис. 7.14. Переходная (а) и импульсная (б) характеристики с дополнительным полюсом
147
|
Выполнено моделирование замкнутой системы с |
|||
W |
(z)= |
1−c |
для определения весовых коэффициентов при еди- |
|
1− z−1 |
||||
зм |
|
|
||
ничных ступенчатом и импульсном входных воздействиях. По полученным временным характеристикам на рис. 7.14 видно, что система устойчива и переходные процессы практически затухают независимо от типа входного воздействия за 2 периода квантования при введенных дополнительных полюсах с ≤ –3.
7.4. Синтез цифрового регулятора на основе имитационного моделирования
По сравнению с инженерными методами, основанными на применении графоаналитических способов определения динамических свойств систем автоматического управления и их практической реализации, аналитические методы при меньшей наглядности, обладают большей точностью результатов. К числу аналитических методов относятся машинные методы расчета, которые позволяют сформулировать задачу определения параметров, соответствующих требуемым динамическим свойствам. По существу задача сводится к построению области, внутри которой выбранный критерий отвечает заранее поставленным условиям.
Алгоритм показан на примере синтеза ПД-регулятора в цифровой системе с астатическим объектом, рассмотренным в примере 7.1.
В качестве критерия примем квадратичный интегральный критерий от переходной составляющей системы с эталонной моделью:
|
( |
|
п |
|
д ) |
|
tp |
пер ( |
|
) |
|
|
эт ( |
|
) |
|
} |
|
|
F |
k |
,k |
= |
∫{ |
t |
2 |
t |
2 |
dt = min, |
(7.39) |
|||||||||
|
|
|
y |
|
|
− y |
|
|
|
||||||||||
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
где kп,kд – параметры настроек выбранного ПД-регулятора.
Понятно, что идеальным эталонным процессом будет воздействие в виде ступенчатого сигнала, однако чрезмерное быстродействие в системе приводит к недопустимым и практически нереали-
148
зуемым перенапряжениям и перегрузкам. В связи с этим эталонной моделью принято линейное динамическое звено первого порядка с постоянной времени τ = 0,1 c, которая выбрана из диапазона рекомендуемых значений tп/6 ≤ τ ≤ tп/3 и длительности апериодического переходного процесса объекта (4...5)То.
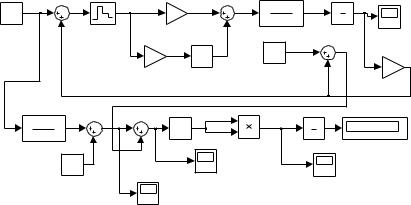
Схема имитационной модели системы для определения настроек регулятора в Simulink приведена на рис. 7.15.
1 |
|
-K- |
100 |
1 |
|
|
0.1s+1 |
s |
|
||
|
|
|
|
||
Constant 1 |
Zero -Order |
Gain 2 |
Integrator |
|
|
Transfer Fcn |
Scope |
||||
|
Hold |
|
|
|
|
-K- |
du /dt |
1 |
|
|
|
|
|
|
|||
Gain |
Derivative |
Constant |
|
-1 |
|
|
|
|
|||
|
|
|
|
Gain 4 |
|
1 |
|u| |
|
1 |
0.003949 |
|
|
|
s |
|||
0.1s+1 |
|
|
|||
|
|
|
|||
Abs |
Product |
Integrator 2 |
Display |
||
Transfer Fcn 1 |
|||||
-1 |
|
|
|
|
|
Constant 2 |
Scope 3 |
|
Scope 2 |
|
|
|
|
|
Scope 1
Рис. 7.15. Схема исследуемой системы в Simulink
Поиск оптимальных параметров настройки регулятора можно провести наиболее эффективным из известных методов поиска экстремума – методом деформируемого многогранника (симплексный метод Нелдера – Мида). Поскольку задачей оптимизации не является изучение методов оптимизации, определение настроек регулятора выполнено простейшим методом при двух параметрах – методом покоординатного спуска.
Для принятой исходной системы переходный процесс на рис. 7.5 соответствует параметрам ПИ-регулятора kп =1, kд = 0.
Поиск параметров ведется вначале по kп уменьшением его значений с интервалом 0,1. При значении коэффициента 0,1 достигается локальный экстремум F (0,1;0) = 0,0176. Следующие поис-
149

ковые шаги проводим по kп с интервалом увеличения 0,01.
На рис. 7.16 приведена схема пошаговой процедуры определения минимума интегрального критерия в функции параметров настройки регулятора.
Поиск экстремума завершается при его значении F(0,18;0,085) = = 0,003949.
Рис. 7.16. Схема определения экстремума интегрального критерия
Рис. 7.17. Переходный процесс оптимизированной системы
Результат моделирования системы с вычисленными параметрами настройки регулятора (kп = 0,18, kд = 0,085) приведен
на рис. 7.17. Получен монотонный переходный процесс длительностью 0,21 с.
150