

книги / Автоматизация в электроэнергетике и электротехнике
..pdfУДК 681.5
СОВЕРШЕНСТВОВАНИЕ ТЕХНОЛОГИЙ УПРАВЛЕНИЯ
А.А. Леута, Нгуен Чунг Чау
Санкт-Петербургский государственный электротехнический университет «ЛЭТИ» им. В.И. Ульянова (Ленина)
Рассматриваются способы совершенствования технологий управления процессами настройки и испытаний аппаратуры САУ как объектов самостоятельной поставки в управлении объектами судовой электроэнергетики.
Ключевые слова: судовые системы и электроэнергетические объекты, технология программнофизического моделирования, технологии управления, процессы настройки и испытаний, метод оптимизации настроечных параметров.
THE IMPROVEMENT OF TECHNOLOGY MANAGEMENT
А.А. Leuta, Nguen Chung Chau
Saint Petersburg Electrotechnical University “LETI”
Ways of the improvement of management technologies of the settings and tests processes for the SAC equipment as objects of independent delivery in management of ship power industry objects are considered.
Keywords: ship systems and electrical power objects, technology of program and physical modeling, technology of management, processes of control and tests, method of optimization of adjusting parameters.
Для систем и объектов судовой |
науки и техники, как можно видеть из |
|||||||
электроэнергетики и автоматики задачи |
следующих примеров. |
|
|
|||||
совершенствования |
технологий управ- |
Подготовка, настройка и ввод объ- |
||||||
ления как в процессах подготовки и про- |
ектов судовой автоматики и электро- |
|||||||
ведения испытаний, так и в процессе |
энергетики в эксплуатацию связаны с |
|||||||
эксплуатации в настоящее время оста- |
рисками, характерными для процессов |
|||||||
ются актуальными. Это связано с тем, |
проведения |
натурных |
экспериментов с |
|||||
что, несмотря на значительные достиже- |
дорогостоящей аппаратурой. Обязатель- |
|||||||
ния в сфере автоматизации, роль челове- |
ность натурных экспериментов опреде- |
|||||||
ка (оператора) в названных процессах |
ляется программами и методиками пред- |
|||||||
остается определяющей и функции, ко- |
варительных и приемо-сдаточных испы- |
|||||||
торые на него возлагаются, заключаются |
таний такого рода объектов. Поскольку |
|||||||
в обработке данных, анализе ситуаций, |
эти процессы |
существенно |
энергоемки |
|||||
поиске оптимизированных (или компро- |
[1] и в то же время достаточно риско- |
|||||||
миссных) |
решений |
и их |
реализации |
ванны, существует необходимость в ре- |
||||
в особых, характерных условиях. |
шении проблем обеспечения энергоре- |
|||||||
Суть и цель этого развития и совер- |
сурсосбережения и |
снижения рисков |
||||||
шенствования заключаются в минимиза- |
в ходе проведения натурных экспери- |
|||||||
ции субъективных составляющих про- |
ментов. |
|
|
|
|
|||
цессов управления с участием человека |
Первым шагом к решению этих |
|||||||
(оператора), при повышении эффектив- |
проблем является организация процессов |
|||||||
ности и безопасности. Это становится |
подготовки |
и |
испытаний |
аппаратуры |
||||
возможным и обеспечивается разработ- |
систем автоматики отдельно от дорого- |
|||||||
ками и внедрением технологий, осно- |
стоящих и энергоемких объектов управ- |
|||||||
ванных на |
современных |
достижениях |
ления. При этом наиболее прогрессив- |
|||||
|
|
|
|
|
|
|
|
91 |

ной, безопасной и эффективной является технология программно-физического моделирования (ПФМ) объектов управления или их отдельных компонентов, основанная на использовании специальных управляемых статических преобразователей с глубоким дистанционным регулированием выходных параметров.
Сущность данной технологии (как можно наблюдать на рис. 1) заключается
внаиболее полной имитации потоков данных (K, S, Z, L) для проверяемой аппаратуры систем управления (САУ). Здесь в качестве объекта принята автоматизированная судовая электроэнергетическая система (СЭЭС), и если информационные потоки K, S и L от модели СЭЭС, будут аналогичны тем, которые существуют в эксплуатации, то по реакции САУ, т.е. по данным потока Z, можно судить о готовности аппаратуры САУ к вводу в эксплуатацию. Преимущества такой технологии перед известными стендовыми технологиями имитации сигналов объекта заключается
вследующем.
Рис. 1. Информационные потоки данных при взаимодействии САУ с объектом управления (СЭЭС) или его ПФМ
По сравнению с силовыми электроэнергетическими аппаратными комплексами на основе вращающихся электромашинных преобразователей комплект статических преобразователей более компактен, не избыточен по мощности, не вызывает шумов, вибраций и выбросов угольной пыли (от щеточных аппа-
92
ратов электромашин постоянного тока), не требует отдельных помещений (агрегатных), прост в обслуживании и дешевле в эксплуатации. Снижение риска повреждения дорогостоящей аппаратуры САУ в процессе натурных экспериментов обеспечивается как встроенными средствами токоограничения или защитного отключения, так и физическим разделением каналов на отдельные формирователи сигналов токов и сигналов напряжений. Следовательно, нет общих нагрузочных устройств и, соответственно, нет опасного выделения мощности на общих для тока и напряжения элементах при имитации объектов большой и потенциально опасной мощности.
По сравнению с имитаторами на основе электронных генераторов сигналов имитаторы на статических преобразователях являются более мощными, число выходных сигналов, их соотношения по фазе, а также наличие или отсутствие гальванической связи полностью соответствует имитируемому объекту. Это позволяет осуществлять подключение выходов имитаторов к аппаратуре САУ непосредственно через штатные внешние соединители, т.е. отвечает требованиям полноты и достоверности комплексной проверки всей аппаратуры в процессе испытаний, включая разъемы, схему соединений и все последовательно или параллельно подключаемые узлы.
С учетом приведенных преимуществ технология программно-физиче- ского моделирования объектов электроэнергетики с применением статических преобразователей является наиболее эффективной для подготовки, настройки и предъявления аппаратуры систем управления как объектов самостоятельной поставки. Частично данная технология применяется на ряде отечественных предприятий [2], но при этом далеко не в полном объеме используются на

практике заложенные в ней возможности. Так, например, автоматизация функций оператора (настройщика) в части обработки данных в ходе экспериментов для выбора и установки желаемых (наилучших) настроечных параметров СУ позволяет оказывать существенную помощь оператору, способствует повышению качества настройки. Использование возможности организации электропитания аппаратуры испытываемой СУ непосредственно от этих же управляемых статических преобразователей, способных воспроизводить неидеализированное качество электроэнергии, делает проверку работоспособности СУ максимально приближенной к условиям эксплуатации, а значит, более полной и достоверной.
Дополнив схему на рис. 1 необходимыми элементами и получив обобщенную структурную схему (рис. 2) процессов подготовки, настройки и предъявления аппаратуры САУ как объекта самостоятельной поставки, рассмотрим ее особенности.
Приведенная структура позволяет осуществлять следующие варианты активных экспериментов:
–настройка математических моделей компонентов СЭЭС и/или САУ (и их компонентов – САР);
–настройка имитаторов СЭЭС для проведения последующих приемосдаточных испытаний аппаратуры САУ
(САР);
–настройка и испытания аппаратуры САУ (САР) как изделий самостоятельной поставки с целью предъявления
еезаказчику для последующей установки и подключения к объекту управления и регулирования.
Основу схемы составляют три контура, образованных цепочками последовательных процедур, реализующих получение данных в ходе экспериментов, сравнение и анализ результатов, принятие решений о продолжении или завершении процесса и, по мере необходимости, изменение данных (корректировка, регулировка, настройка) для новых экспериментов. Очевидно, что интенсификация этих процессов при соблюдении условий объективности оценки результатов связана с автоматизацией [3].
Эффективное решение задачи автоматизации рассматриваемых процессов, кроме применения современных средств
Рис. 2. Обобщенная структура процессов подготовки, настройки и испытаний САУ
93

сбора, обработки и вывода информации, |
|
|
||||||||
заключается еще и в использовании пря- |
|
|
||||||||
мого метода многопараметрической оп- |
|
|
||||||||
тимизации |
настроечных |
параметров, |
|
|
||||||
а именно нового метода деформируемо- |
|
|
||||||||
го многогранника, отличающегося тем, |
|
|
||||||||
что поиск направления и продвижение к |
|
а |
||||||||
желаемой цели осуществляется по ре- |
|
|||||||||
зультатам N + 1 экспериментов, выпол- |
|
|
||||||||
ненных |
с |
различными |
значениями |
|
|
|||||
настроечных параметров (N – число па- |
|
|
||||||||
раметров) по направлению через сме- |
|
|
||||||||
щенный центр тяжести многогранника, |
|
|
||||||||
как показано на рис. 3. Для рассматри- |
|
|
||||||||
ваемого объекта в качестве целевой |
|
|
||||||||
функции оптимизации предлагается ис- |
|
|
||||||||
пользовать |
минимальное |
|
значение |
|
|
|||||
функционала, вычисляемого |
как |
пло- |
|
б |
||||||
щадь фигуры, образованной кривыми |
|
|||||||||
Рис. 3. Выбор направления точки с координатами |
||||||||||
идеального и экспериментального пере- |
настройки параметров оптимизационным |
|||||||||
ходных процессов при изменении на- |
||||||||||
методом деформируемого многогранника |
||||||||||
грузки генераторных агрегатов. |
|
|
со смещенным центром тяжести: |
|||||||
Разработанный алгоритм и про- |
а – без ограничений; б – с ограничениями |
|||||||||
|
|
|||||||||
граммное |
обеспечение |
для |
реализации |
Обобщая |
вышеизложенное, можно |
|||||
на ЭВМ подготовлены к регистрации в |
||||||||||
сделать выводы о том, что такие разра- |
||||||||||
фонде программ. Эффективность метода |
ботки, как технология программно- |
|||||||||
подтверждается экспериментально |
мо- |
физического моделирования с использо- |
||||||||
делированием процесса. Получение ре- |
ванием специальных управляемых ста- |
|||||||||
зультата ускоряется на 11–15 % по срав- |
тических преобразователей в сочетании |
|||||||||
нению с известным базовым методом |
с оптимизацией параметров настройки, |
|||||||||
оптимизации. Существенно, что метод |
эффективны и уже сегодня пригодны для |
|||||||||
пригоден как для автоматизации на- |
широкого использования в практике соз- |
|||||||||
стройки коэффициентов уравнений ма- |
дания и эксплуатации судовых электро- |
|||||||||
тематических моделей, так и для настро- |
энергетических объектов. Их эффектив- |
|||||||||
ечных параметров реальной аппаратуры |
ность заключается в том, что они |
|||||||||
с учетом существующих ограничений на |
способствуют |
дальнейшему развитию |
||||||||
изменения настроечных параметров (как |
автоматизации, повышению безопасно- |
|||||||||
показано на рис. 3). Метод полностью |
сти при одновременном удовлетворении |
|||||||||
соответствует рассмотренной на рис. 2 |
требований ресурсо- и энергосбере- |
|||||||||
обобщенной структуре комплекса аппа- |
жения. |
|
||||||||
ратно-программных средств автоматиза- |
Список литературы |
|||||||||
ции процессов настройки и испытаний |
||||||||||
аппаратуры |
САУ, |
элементы |
которого |
1. Беликов Э.Г., Стрижак В.В., Ми- |
||||||
разрабатывается |
на |
кафедре |
САУ |
|||||||
хайлов В.В. Интенсификация регулиро- |
||||||||||
СПбГЭТУ «ЛЭТИ». |
|
|
|
|
|
|
||||
94
вочно-сдаточных работ энергоемкого |
управления // Известия гос. электротехн. |
||||
электрооборудования // Судостроение. – |
ун-та. Сер. Автоматизация и управле- |
||||
1986. – № 6. – С. 38–39. |
|
|
ние. – СПб., 2010. – № 2. – С. 25–30. |
||
2. Губанов Ю.А., Леута А.А. Ком- |
4. Леута А.А., Нгуен М.Д., Нгу- |
||||
плект аппаратно-программных средств |
ен Ч.Ч. Информационная поддержка при- |
||||
для проведения |
испытаний |
систем |
нятия решений по оперативному управ- |
||
управления корабельными электроэнер- |
лению объектами судовой электроэнерге- |
||||
гетическими |
системами |
// |
Системы |
тики с применением методов нечеткой |
|
управления и обработки информации: |
логики // Известия гос. электротехн. ун- |
||||
научн.-техн. сб. ФНЦ «НПО “Аврора”». – |
та. Сер. Автоматизация и управление. – |
||||
СПб., 2000. – Вып. 2. – С. 129–139. |
СПб., 2012. – № 1. – С. 61–67. |
||||
3. Леута |
А.А., Нгуен |
Ч.Ч., Нгу- |
5. Леута А.А., Кузнецов М.А. Новые |
||
ен М.Д. Математическая модель компо- |
тенденции в развитии аппаратуры кора- |
||||
нентов судовых |
электроэнергетических |
бельных систем управления техниче- |
|||
систем как составная часть технологии |
скими средствами // Судостроение. – |
||||
испытаний |
систем автоматического |
2008. – № 2. – С. 39–43. |
|||
95
УДК 681.5.011
ИСПОЛЬЗОВАНИЕ МЕТОДА D-РАЗБИЕНИЯ ПРИ АНАЛИЗЕ УСТОЙЧИВОСТИ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА
А.В. Морозов
Санкт-Петербургский государственный электротехнический университет «ЛЭТИ» им. В.И. Ульянова (Ленина)
Рассматривается возможность исследования устойчивости асинхронного электропривода с помощью построения областей D-разбиения. Аналитический расчет проводится по линеаризованному математическому описанию системы векторного управления электропривода. Метод D-разбиения позволяет определять области с одинаковым набором корней системы.
Ключевые слова: асинхронный электропривод, линеаризация, векторное управление, метод D-разбиения.
INDUCTION MOTOR DRIVE STABILITY ANALYSIS USING
D-DECOMPOSITION METHOD
A.V. Morozov
Saint Petersburg Electrotechnical University “LETI”
D-decomposition method for induction motor drive stability analysis is considered in this paper. The proposed linearized mathematical model of vector control for induction motor is used. The method allows identifying areas with the same set of the root.
Keywords: induction motor drive, linearization, vector control, D-decomposition method.
Асинхронный электропривод в настоящее время широко применяется в различных сферах машиностроения. В частности, его использование в судовых системах электродвижения обусловливается наличием ряда свойств, характерных для электроприводов такого типа. Система управления электропривода, построенная на основе векторных алгоритмов, позволяет получать характеристики асинхронного двигателя (АД), близкие к характеристикам двигателя постоянного тока. Вместе с этим актуальным является вопрос устойчивости электропривода в различных режимах работы.
АД, входящий в состав электропривода, представляет собой нелинейный объект. Система векторного управления электропривода по определению относится также к области нелинейных систем управления. Одним из способов исследования устойчивости такого класса
систем является переход от нелинейного математического описания к линеаризованному виду в окрестности определенного состояния равновесия и дальнейшее исследование на основе метода D-раз- биения [1].
Рассмотрим математическое описание асинхронного электропривода.
В выражениях приняты следующие обозначения: Iqs, Ids – проекции вектора тока статора на оси d и q; Ψr – потокосцепление ротора; ωr – скорость ротора; Uqs, Uds – проекции напряжения питания статора на оси d и q; ω0 – скорость вращения поля статора; Rs, Rr – активное сопротивление статора и ротора; Ls, Lr – индуктивности статора и ротора; Lm – взаимная индуктивность; Zp – число пар полюсов; J – момент инерции; Mc – момент нагрузки.
С учетом принятого алгоритма векторного управления с ориентацией по полю ротора (Ψqr = 0; Ψr = Ψdr) получим
96
|
|
|
|
|
|
|
L U |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Iqs = |
|
|
|
r qs |
|
|
−ω0 Ids − |
|
|
|
|
|
|||||||||||||||||||
|
|
|
2 |
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
Ls Lr − Lm |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
R L2 |
+ R L |
|
|
|
|
|
|
|
|
|
|
|
|
|
Lr Z pωr Ψr |
|
|
||||||||||
− |
|
|
|
s r |
|
r m |
|
|
|
I |
|
|
− |
|
|
|
|
|
|
|
, |
|
|||||||||
|
|
|
(Ls Lr − L2m ) |
qs |
|
|
|
Ls Lr − L2m |
|
||||||||||||||||||||||
|
|
|
Lr |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
LrUds |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
I |
ds |
= |
|
|
|
|
+ω |
I |
qs |
− |
|
|
|
|
|
||||||||||||||||
|
|
|
2 |
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
Ls Lr − Lm |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(1) |
||||
|
|
|
|
Rs L2r + Rr Lm |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Rr LmΨr |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
− |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ids + |
|
|
|
|
|
|
|
, |
||||||||
|
Lr |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
2 |
||||||||||||||
|
|
|
(Ls Lr − Lm ) |
|
|
|
|
|
|
|
|
Lr (Ls Lr − Lm ) |
|
||||||||||||||||||
|
|
|
|
|
|
|
Rr |
|
|
|
|
|
Rr Lm |
|
|
|
|
|
|
|
|
|
|
||||||||
Ψr = − |
Ψr + |
Ids , |
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
Lr |
|
|
|
|
|
|
Lr |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
3Z p Lm |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
||||||
ω = |
|
Ψ |
|
|
I |
|
|
− |
|
|
M |
|
, |
|
|
|
|||||||||||||||
|
|
|
|
|
|
J |
|
|
|
|
|
|
|||||||||||||||||||
|
|
r |
|
|
2JL |
r |
|
|
|
qs |
|
|
|
|
|
c |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Математическое описание (1) представляет собой систему нелинейных дифференциальных уравнений. Для дальнейшего исследования проведем линеаризацию системы в окрестности выбранного состояния равновесия. Линеаризованная методом малых отклоне-
ний система уравнений при Mc = 0 может быть записана как
|
|
|
|
L |
∆U |
qs |
|
|
|
|
|
|
|
|
|
|||
∆Iqs = |
|
|
r |
|
−ω0∆Ids − |
|
|
|
||||||||||
|
|
|
|
|
2 |
|
|
|
|
|||||||||
|
|
|
Ls Lr − Lm |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
2 |
+ Rr Lm |
|
|
|
|
|
|
|
|
|
|
||||
− |
|
Rs Lr |
|
∆I |
|
− |
|
|
|
|
|
|
||||||
Lr (Ls Lr − L2m ) |
qs |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
||||||||||
|
|
Lr Z p (ωr0∆Ψr +∆ωr |
Ψr0 ) |
|
|
|
||||||||||||
|
|
|
|
|
||||||||||||||
− |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
Ls Lr − Lm |
|
|
|
|
|
|
|
|||||
|
|
|
|
Lr ∆Uds |
|
|
|
|
|
|
|
|
|
|||||
∆Ids = |
|
+ω0∆Iqs − |
|
(2) |
||||||||||||||
|
2 |
|
||||||||||||||||
|
|
|
Ls Lr − Lm |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
2 |
+ Rr Lm |
|
|
|
|
|
|
Rr Lm∆Ψr |
|
||||||
|
|
Rs Lr |
|
|
|
|
|
|||||||||||
− |
Lr (Ls Lr − L2m ) ∆Ids + Lr (Ls Lr − L2m ), |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
Rr Lm |
|
|
|
|
|||
|
|
|
|
|
Rr |
|
|
|
|
|
|
|
|
|||||
∆Ψr = − |
|
∆Ψr + |
|
|
|
|
∆Ids |
, |
|
|||||||||
Lr |
|
Lr |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
3Z |
L |
(Ψr0∆Iqs +∆Ψr Iqs0 ). |
|||||||||||||
∆ωr = |
|
|
|
p m |
||||||||||||||
|
2JLr |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Найдем характеристический полином R(p), используя матрицу системы (2) вида
|
|
|
2 |
|
|
|
− |
|
Rs Lr + Rr Lm |
||||
|
Lr |
(Ls Lr − L2m ) |
||||
|
|
|
|
|
|
|
|
|
|
|
ω0 |
||
|
|
|
|
|||
A = |
|
|
|
|
|
|
|
|
|
|
Rr Lm |
||
|
|
|
|
|
|
|
|
|
|
Lr |
|||
|
|
|
|
|||
|
|
3Z p LmΨr0 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2JL |
||
|
|
|
|
|||
|
|
|
r |
|||
−ω0
− Rs L2r + Rr Lm Lr (Ls Lr − L2m )
0
0
− Lr Z pωr0
Ls Lr − L2m
Lr (Ls Lr − L2m )
−Rr Lr
3Z p Lm Iqs0
2JLr
|
L Z |
p |
Ψ |
r0 |
|
|
− |
r |
|
|
|
||
|
|
|
2 |
|
||
|
Ls Lr − Lm |
|
||||
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
. |
|
||
|
|
|
|
|
(3) |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
97
В матрицу (3) введем замену
σ =1− |
L2m |
|
. |
(4) |
|
L L |
|||||
|
|
|
|||
|
s |
r |
|
|
|
Тогда, используя матрицу (3), с учетом выражения (4), можно получить
|
R( p) = p4 + |
|
R L2 |
+ R L + R L L σ |
p3 + |
|
|
||||||||||||||||||||||||||||
|
2 |
|
s r |
|
|
|
r m |
|
|
r s r |
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
L L2 |
σ |
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s r |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
+ Rs Lr + Rr Lm |
|
2 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
||||||||||||||||
+ |
ω2 |
|
|
+ 2Rr (Rs Lr + Rr Lm ) + |
|
||||||||||||||||||||||||||||||
|
|
0 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
Ls Lr σ |
|
|
|
|
|
|
|
|
Ls Lr σ |
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
3 |
(Z p LmΨr |
0 )2 |
|
|
|
|
R Z |
L2 ω |
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
r |
p m r 0 |
|
p2 + |
|
|
||||||||||||
|
|
|
|
|
|
|
2JL L2 |
σ |
|
|
L L2σ |
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
s |
r |
|
|
|
|
|
|
|
|
|
s |
r |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
R |
|
|
|
R R L + R L |
|
|
2 |
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
+ |
|
r |
ω2 + |
|
r |
|
|
|
|
s r |
|
r m |
|
|
|
+ |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
L |
0 |
|
|
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ls Lr σ |
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
r |
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
3(Z p LmΨr 0 )2 (Rs Lr |
+ Rr Lm ) |
|
ω R2 L2 |
|
|
|||||||||||||||||||||||||||
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
0 |
|
r3 |
m + |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
2 |
4 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
2JL L σ |
|
|
|
|
|
|
|
|
|
|
|
L L |
σ |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
|
r |
|
|
|
|
|
|
|
|
|
|
|
s |
r |
|
|
|
|
|||
|
|
|
|
|
+ |
|
3Rr L2mZ p2Ψr0 (Lm Iqs0 +Ψr0 ) |
+ |
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
2JL L3σ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
Rr Z pωr0 L2m (Rs L2r + Rr Lm ) |
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p + |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
L2 L4σ2 |
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
+ |
|
3Rr (Rs L2r + Rr Lm )L2mZ p2Ψr 0 (Lm Iqs0 |
+Ψr0 ) |
. |
(5) |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2JL2 L5σ2 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Рассматриваемый метод D-разбие- ния позволяет определять области устойчивости, соответствующие значениям параметров системы, при которых все корни характеристического полинома имеют отрицательные вещественные части [2]. Примем в качестве изменяемого параметра сопротивление статора АД, тогда характеристический полином (5) можно переписать как
R( p) = A( p)Rs + B( p)Rs2 +C( p) = 0, |
|
||||||
|
|
+a2 p2 +a1 p +a0, |
|
||||
A( p) = a3 p3 |
(6) |
||||||
|
2 |
|
|
|
|
|
|
B( p) = b2 p |
+b1 p, |
|
|
|
|
||
|
4 |
+c3 p |
3 |
+c2 p |
2 |
+c1 p +c0. |
|
C( p) = c4 p |
|
|
|
|
|||
Полином R(p) из системы (6) представляет собой параметрическое уравнение. Перейдем в частотную область пу-
98
тем замены p = jω и решим уравнение относительно параметра Rs:
R |
= |
−A( jω) ± |
A( jω)2 −4B( jω)C( jω) |
= |
|
|
|||
s |
|
2B( jω) |
|
|
|
|
|
|
|
=−(A1(ω)B1(ω) + A2 (ω)B2 (ω) +
+j ( A2 (ω)B1(ω) + A1(ω)B2 (ω))) /
/(2B12 (ω) +2B22 (ω))±
± |
|
D( jω) |
|
, |
(7) |
2B2 |
(ω) +2B2 |
(ω) |
|||
1 |
2 |
|
|
|
|
где D ( jω) – дискриминант параметрического уравнения, D ( jω) = D1 (ω) +
+jD2 (ω) = (A12 −4B1C1 − A22 +4B2C2 )+
+j (2A1 A2 −4B1C2 −4B2C1 ).
Значение квадратичного корня может быть найдено по формуле Муавра:
D = D1 + jD2 =
= 4 D12 + D22 ×
1
×cos 2 arccos
1
+j sin 2 arcsin
D1 |
|
+2k |
|
D2 |
+ D2 |
|
|
1 |
2 |
|
|
D1 |
|
+2k |
|
D2 |
+ D2 |
|
|
|
|
||
1 |
2 |
|
|
+
, (8)
k = 0,1.
Выражения (7), (8) позволяют построить соответствующие различным значениям коэффициента k (k = 0 и k = 1) области D-разбиения (см. рисунок, а, б соответственно).
Согласно работе [1] введем основные правила разметки областей D-раз- биения, представленных на рисунке, а и б. Если при перемещении из одной области в другую пересечение кривой происходит с заштрихованной стороны на незаштрихованную, то число корней
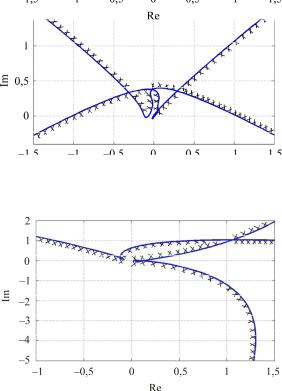
характеристического полинома в правой полуплоскости увеличивается на два, в противном случае – уменьшается на два.
Таким образом, метод D-разбиения позволяет определять области с одинаковым набором корней системы. Окончательно выбор областей устойчивости осуществляется путем проверки по одному из общеизвестных критериев.
а
Список литературы
1. Жданов П.С. Вопросы устойчивости электрических систем. – М.: Энер-
гия, 1979.
2. Поляк Б.С., Грязина Е.Н. Новые аспекты D-разбиения / Ин-т проблем управления РАН. – М., 2007. – С. 141– 158.
б
Рис. Области D-разбиения исследуемой системы
99
УДК 621.313.12
АНАЛИЗ УСТОЙЧИВОСТИ ГЕНЕРАТОРА ПОСТОЯННОГО ТОКА В СОСТАВЕ ИМПУЛЬСНОГО ИСТОЧНИКА ПИТАНИЯ
О.В. Мохова
Санкт-Петербургский государственный электротехнический университет «ЛЭТИ» им. В.И. Ульянова (Ленина)
Рассматривается импульсный источник тока большой мощности на основе электромеханических преобразователей энергии для формирования сильного импульсного магнитного поля. Приведено математическое описание исследуемого объекта. Был сделан акцент на генераторе постоянного тока с независимым возбуждением для анализа устойчивости импульсного источника тока на данном этапе. В качестве критерия устойчивости был выбран критерий абсолютной устойчивости В.М. Попова для класса нелинейных систем с нелинейностью типа трехпозиционное реле.
Ключевые слова: импульсный источник тока, генератор постоянного тока с независимым возбуждением, устойчивость нелинейных систем.
STABILITY ANALYSIS OF DC GENERATOR AS PART
OF SWITCHING POWER SUPPLY
O.V. Mokhova
Saint Petersburg Electrotechnical University “LETI”
The pulse current supply based on electromechanical energy converters that generates high magnetic field is considered. The mathematical model of the research object is given. On this stage the DC generator with separate excitation as the analysis subject of pulse current supply stability is emphasized. The V. Popov’s absolute stability criterion for a class of nonlinear systems with three-position relay nonlinearity type is used.
Keywords: pulse power source, DC generator with independent excitation, stability of nonlinear systems.
Введение
Объектом данной работы является импульсный источник тока (ИИТ) большой мощности для формирования сильного импульсного магнитного поля, идея создания которого и первые опыты по ее реализации принадлежат П.Л. Капице [2]. В ИИТ большой мощности помимо электромеханических преобразователей, как в опыте П.Л. Капицы, можно использовать и другие источники энергии: молекулярные накопители, как указано в работе [1]; дроссели и т.д. В исследовании рассмотрен электромеханический вариант исполнения ИИТ.
Структура ИИТ и требования к форме импульса
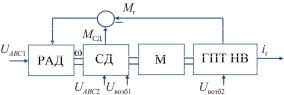
Разрабатываемый ИИТ представляет собой четырехмассовую систему, со-
стоящую из разгонного асинхронного двигателя (РАД), приводного электрического синхронного двигателя (СД), маховика (М) и генератора постоянного тока с независимым возбуждением (ГПТ НВ). Работа системы состоит из подготовительного этапа, в течение которого осуществляется разгон четырехмассовой системы до номинальной скорости, и рабочего этапа, в процессе которого осуществляется формирование импульсной последовательности тока. Функциональная схема ИИТ представлена на рис. 1.
Рис. 1. Функциональная схема ИИТ
100