

2.4. Детекторы транспорта
2.4.1. Общие сведения
В автоматизированных системах управления дорожным движением информация о текущих характеристиках ТП собирается с помощью детекторов транспорта (ДТ). Полученные данные необходимы для работы контроллеров, осуществляющих локальное управление на перекрестках, и центральных управляющих пунктов для выбора оптимального режима работы системы.
Режимом, который обеспечивает максимальную эффективность использования оборудования АСУД, в том числе и ДТ, является режим
координированного управления. В связи с этим при выборе типов ДТ, мест их установки на дорожно-транспортной сети и размещения чувствительных элементов (ЧЭ) необходимо в первую очередь решать эти задачи применительно к использованию ДТ в составе АСУД, а затем рассматривать их возможное использование при локальных режимах. Такое решение объясняется также тем, что АСУД, как правило, работает с
600 до 2300, т.е. практически весь период времени, когда имеется значительное движение ТС.
Задача размещения ДТ в районе управления АСУД включает несколько этапов:
· выбор в районе управления перекрестков, на которых необходимо устанавливать ДТ определенного типа;
· размещение чувствительных элементов на перекрестках;
· выбор режимов работы ДТ.
Типы детекторов транспорта и их функции. В современных АСУД информация о текущих характеристиках транспортных потоков собирается с помощью детекторов транспорта, которые входят в состав комплексов технических средств АСС-УД, «Сигнал», АСУД-С [4].
По принципу действия детекторы транспорта разделяются на следующие:
ü индуктивные;
ü феррозондовые;
ü ультразвуковые;
ü инфракрасные.
Индуктивные и феррозондовые ДТ широко применялись в 80 – 90-х годах, но так как их монтаж связан с серьезными строительными работами, а срок службы, как правило, составлял не более одного года, то от них пришлось отказаться.
Ультразвуковые детекторы имели очень ограниченное, в основном экспериментальное применение [5,8].
В настоящее время наибольшее распространение получили инфракрасные ДТ (ДТ-ИК). Это обусловлено отсутствием строительных работ при их монтаже и длительным сроком службы (до 8 лет). Поэтому
далее технология применения ДТ будет изложена применительно к ДТ-ИК.
Основными функциями ДТ являются:
· сбор статистических данных по интенсивности движения ТП, скорости и времени присутствия;
· обеспечение работы режима МГР по поиску разрывов в ТП;
· сбор данных для расчета задержек ТС.
ДТ подразделяются на несколько типов в зависимости от назначения. Наибольшее распространение получили ДТ следующих типов:
ü интенсивности;
ü заторовые;
ü скорости;
ü состава потока.
ДТ интенсивности позволяют одновременно выполнять ряд следующих задач:
D подсчет количества ТС за заданный период времени
(интенсивность);
D рассчитывать задержку ТС;
D осуществлять поиск разрывов в ТП (режим МГР).
ДТ остальных типов позволяют выполнять по одной задаче: детекторы скорости измеряют скорость движения ТС в заданной зоне, заторовые детекторы измеряют время присутствия ТС в контролируемой зоне.
2.4.2. Принципы установки детекторов транспорта
Детекторы интенсивности. На основании статистики по изменению интенсивности транспортных потоков в течение суток производится выбор мест размещения детекторов интенсивности.
Детекторы интенсивности следует устанавливать при соблюдении следующих условий:
· на входных перекрестках магистралей;
· на перекрестках, удаленных от других (смежных) на расстояние не более 800 м, что позволяет корректировать планы координации, уменьшая задержки ТС на перекрестках;
· на перекрестках со значительными изменениями интенсивности движения в течение суток, когда требуется перераспределение длительности фаз, при интенсивности более 300 авт./ч на полосу;
· на перекрестках с интенсивностью более 1500 авт./ч в сечении дороги, требующих введения вызывных фаз по второстепенным
направлениям, когда пересекающая магистраль имеет интенсивность
менее 120 авт./ч на полосу.
В случае, когда пересекающая магистраль имеет малую интенсивность движения транспортных потоков, не совмещена с пешеходным движением, требующим ежециклично фазу, детектор не устанавливается (интенсивность пешеходов – более 500 – 600 чел./ч).
Основным требованием для вышеперечисленных условий является:
tmin i < ti , (2.1)
где
tmin i
– минимальная длительность i-й фазы; ti
– фактическая
длительность i-й фазы (по расчету).
Причем для перекрестков с 2-фазной организацией движения данное условие должно выполняться для обеих фаз, а для перекрестков с
организацией движения, имеющей более двух фаз, данное условие должно выполняться не менее чем для двух фаз.
Если ни одно из условий не выполняется, то размещение детекторов экономически нецелесообразно.
Детекторы скорости. Детекторы скорости устанавливаются на перегонах перед перекрестками, на которых:
· скорость не зависит от маневров ТС;
· отсутствуют помехи (остановки общественного транспорта, остановки на обочине);
· длина от места установки чувствительного элемента (ЧЭ) до перекрестка не менее 200 м.
Один детектор устанавливается на магистрали из 10 – 12 перекрестков.
Чувствительные элементы устанавливаются на левую или среднюю полосу в прямом и обратном направлениях на перегоне длительностью не более
400 м.
Детекторы состава потока. Детекторы состава потока применяются для сбора статистических данных по составу потока в районе управления.
С помощью этих данных определяются интенсивности движения в приведенных единицах, корректируются планы координации. Детекторы состава потока устанавливаются на наиболее загруженных перегонах,
отличающихся значительными изменениями состава потока. Точки их установки (если в системе предусмотрен сбор статистических данных по составу потока) определяются по результатам предварительного обследования.
Заторовые детекторы. Заторовые детекторы устанавливаются перед перекрестками, на которых возможно возникновение очереди ТС, которая не разгружается за цикл и распространяется до соседнего перекрестка, перекрывая на нем движение в поперечном направлении. Необходимость установки детекторов определяется на основании анализа вероятности возникновения затора.
ЧЭ следует устанавливать на левую полосу, во избежание непредвиденных ситуаций. Расстояние L от стоп-линии до места размещения ЧЭ следует рассчитывать по формуле
L = l × g / t , (2.2)
где g – длительность зеленого сигнала на перекрестке, с; l – средний динамический габарит ТС, м; t – среднее время разгрузки для одной полосы движения, принимается равным 2,5 с.
2.4.5. Детектор транспорта ДТ-ИК
Назначение. Детектор транспорта ДТ-ИК предназначен для работы в качестве детектора прохождения транспортных средств по дорожно- транспортной сети в составе автоматизированных систем управления дорожным движением.
Технические данные. Принцип обнаружения транспортных единиц
(ТЕ) – пассивное инфракрасное детектирование.
Тип работы – детектор прохождения. Дальность обнаружения ТЕ – 12 м.
Максимальный размер контролируемой зоны (КЗ) – 2 м ´ 2 м по одной полосе в одном направлении движения.
Диапазон рабочих температур – от - 40 до + 50 °С. Питание – напряжение переменного тока 220 В. Потребляемый ток – 30 мА (max).
Протокол передачи информации – АСС-УД.
Устройство и работа ДТ-ИК. На рис. 2.6 приведена структурная схема детектора ДТ-ИК.
На плате ПИК-1 в качестве чувствительного элемента в инфракрасном датчике ИКД применён пассивный пироэлектрический элемент, который
обеспечивает необходимое измерение выходного сигнала при изменении температуры в контролируемой зоне на 5 °С. Спектр принимаемого ИК излучения исключает влияние на работу датчика чада от выхлопных газов, тумана и водяных паров и обеспечивает независимость от атмосферных
условий. Интенсивность контролируемого излучения зависит от температуры объекта, его размеров и структуры поверхности, но не от её цвета или условий освещённости. Поэтому датчик работает круглосуточно.
Плата УП-1 содержит процессор, задачей которого является определение наличия ТЕ в контролируемой зоне на основании анализа сигналов, поступивших с ИКД. Светодиод HL2 индицирует поступление стартовых импульсов на устройство. Светодиод HL1 индицирует сигнал прохождения ТЕ, формируемый процессором.
ИПТ-3 – источник питания, обеспечивающий работу ПИК-1 и УП-3.
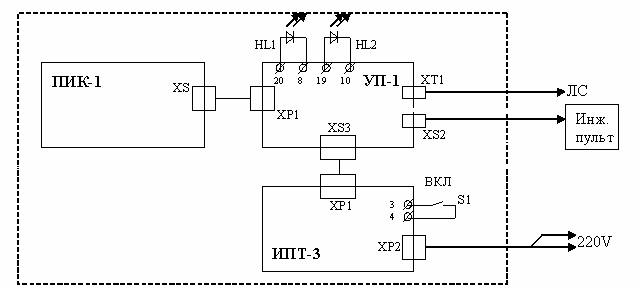
Рис. 2.6. Структурная схема детектора ДТ-ИК
Установка детектора. На объекте устройство ДТ-ИК может монтироваться на светофорной колонке, мостах, эстакадах, столбах освещения. Следует обратить внимание на стабильность монтажа. Вибрации носителя (мачты, кронштейна и т. д.), обусловленные погодными условиями, должны быть исключены.
На рис. 2.7 приведен пример установки детектора на столбе освещения. Устройство может поворачиваться на кронштейне крепления на угол,
равный 35°. Угол захвата оптической системы датчика составляет 8°, и при указанных на рисунке размерах контролируемая зона (КЗ) будет иметь вид
квадрата 1,7 ´ 1,7 м.
Детектор ДТ-ИК подключается к линии связи с помощью двух
проводов через разъем ХТ1 платы УП-1. Назначение контактов разъема ХТ1 следующее: 1 – первый провод линии связи; 2 – второй провод линии связи.
Сетевое напряжение подводится к разъему ХP2 (контакты 3, 4) платы
ИПТ-3.
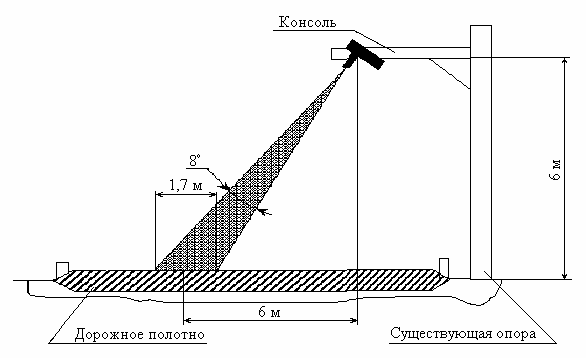
Рис. 2.7. Пример установки детектора на столбе освещения