

Гизатуллин монография 1
.pdfЭкспериментальные данные [256] и результаты прогнозирования представлены на рис. 2.51 и 2.52.
а |
б |
Рис. 2.51. Результаты экспериментального анализа электромагнитных помех в межсоединении МПП: а – воздействующий ЭМИ; б – электромагнитная помеха
а |
б |
Рис. 2.52. Прогнозирование электромагнитных помех в межсоединении МПП:
а – с использованием аналитической модели (раздел 2.6); б – имитационное моделирование
Пример 4 [250]. Прогнозирование электромагнитной помехи в межсоединении МПП при электромагнитном воздействии высотного ЯВ (рис. 2.54 и 2.55).
Исходные данные (рис. 2.53): межсоединение по оси x – 150 мм; межсоединение по оси y (2 шт.) – 50 мм; ширина межсоединений – 1 мм; толщина межсоединений – 35 мкм; нагрузка 1 (выходные параметры высокоскоростного цифрового элемента КМОП типа) – 50 Ом, 5 пФ; нагрузка 2 (входные параметры высокоскоростного
131
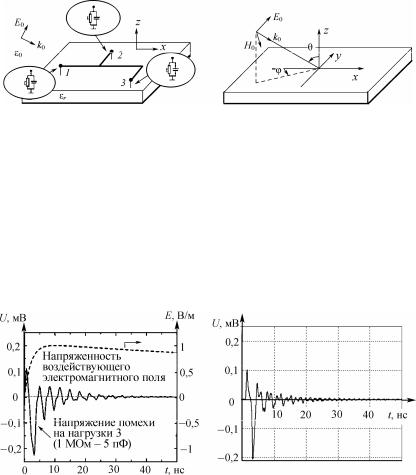
цифрового элемента КМОП типа) – 1 МОм, 5 пФ; нагрузка 3 (входные параметры высокоскоростного цифрового элемента КМОП типа) – 1 МОм, 5 пФ; толщина диэлектрического слоя МПП – 1,57 мм; диэлектрическая проницаемость материала – 4,7.
а |
|
|
б |
Рис. 2.53. Конфигурация исследуемой МПП и описание ориентации внешнего |
|||
|
ЭМИ по отношению к МПП |
|
|
Воздействующий ЭМИ описывается с помощью следующего |
|||
выражения [267, 268]: |
|
|
|
|
− t |
− t |
|
E0 |
(t ) = 1,05× Emax × eT2 |
- e T1 |
, |
|
|
|
|
|
|
|
|
где Emax = 1 В/м; T1 = 2,1×10−9; T2 = 250 ×10−9; |
θ, φ – 45; поляриза- |
||
ция γ – 0. |
|
|
|
а |
б |
Рис. 2.54. Результаты прогнозирования электромагнитной помехи в межсоединениях МПП: а – воздействующее ЭМИ и электромагнитная помеха
(нагрузка 3), эксперимент [268]; б – имитационное моделирование
132
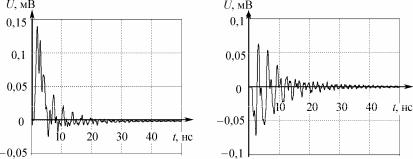
а |
б |
Рис. 2.55. Результаты прогнозирования электромагнитной помехи в межсоединениях МПП (имитационное моделирование: а – на нагрузке 1; б – на нагрузке 2)
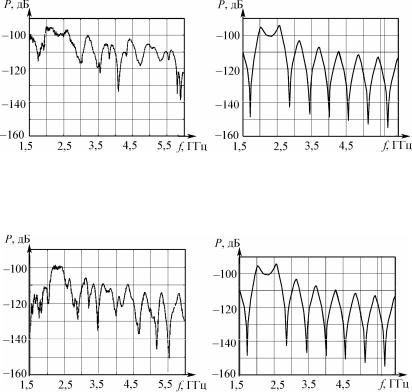
Пример 5 [260, 261]. Сравнение результатов прогнозирова-
ния электромагнитных помех в неэкранированной витой паре при внешних электромагнитных воздействиях с экспериментальных дан-
ными, представленными в литературе [263]. На рис. 2.56 и 2.57
представлены сравнительные результаты моделирования мощности рассеивания электромагнитных помех на нагрузке ZS (рис. 2.44)
при внешнем электромагнитном воздействии с различных сторон.
Исходные данные: длина неэкранированной витой пары –
LZ = 0,4 м; нагрузка – ZS = ZL = 50 Ом; относительная магнитная проницаемость изоляции линий передачи – μ = 1; проводимость проводников витой пары – σ = 5,8×107; диаметр цилиндрических проводников витой пары – d = 0,5 мм; диэлектрическая прони-
цаемость изоляции линий передачи – ε = 3,2; расстояние между осями проводников витой пары – s = 1,28 мм; шаг скрутки провод-
ников витой пары – p = 110 мм; напряженность воздействующего электрического поля – Ei = 1 мВ/м; частота воздействующего электрического поля от 1,5 до 6 ГГц.
133
а |
б |
Рис. 2.56. Мощность рассеивания на нагрузке Zs при внешнем электромагнитном воздействии: а – эксперимент; б – моделирование; вектор напряженности электрического поля направлен по оси z
а |
б |
Рис. 2.57. Мощность рассеивания на нагрузке Zs при внешнем электромагнитном воздействии: а – эксперимент; б – моделирование; вектор напряженности электрического поля направлен по оси x
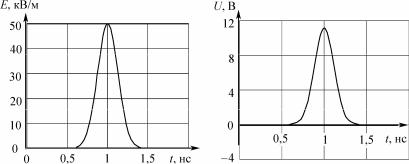
Пример 6. Прогнозирование электромагнитной помехи в неэкранированной витой паре при воздействии ЭМИ СЭТ.
Исходные данные: форма и параметры ЭМИ (рис. 2.58, a); параметры неэкранированной витой пары 5 категории; длина неэкранированной витой пары 50 м. На рис. 2.58, б представлен результат прогнозирования электромагнитной помехи на нагрузке Zs неэкранированной витой пары при данном электромагнитном воздействии.
134
а |
б |
Рис. 2.58. Временная форма ЭМИ СЭТ (а) и максимальная электромагнитная помеха (б) в неэкранированной витой паре (нагрузка ZS, воздействие с торца витой пары)
Таблица 2.23
Сравнение результатов экспериментальных исследований и моделирования электромагнитных помех в линиях связи СВТ при широкополосных электромагнитных воздействиях
|
Максимальная амплитуда электромагнитной |
Расхождение резуль- |
||
№ при- |
|
помехи, В |
|
|
|
|
татов, % (аналитиче- |
||
мера |
|
Аналитическая |
Имитационное |
|
Эксперимент |
ская модель) |
|||
|
|
модель |
моделирование |
|
1 |
1,03 |
не применима |
1,15 |
10,4 |
2 |
1,40 |
не применима |
1,25 |
12,0 |
3 |
0,17 |
не применима |
0,15 |
13,4 |
4 |
0,0005 |
0,00055 |
0,0005 |
0 (10 %) |
5 |
|
28 |
32 |
(14,3 %) |
6 |
–0,0022 |
Не применима |
–0,002 |
9,1 % |
7 |
21,0 |
22,8 |
20,5 |
2,4 % (8,6 %) |
8 |
1,7 |
1,94 |
1,75 |
2,9 % (14,1 %) |
9 |
0,00039 |
Не применима |
0,00046 |
18 % |
[269] |
|
0,75* |
0,65 |
(13,3 %) |
[269] |
|
0,96* |
0,84 |
(12,5 %) |
[269] |
|
1,95* |
1,76 |
(9,7 %) |
[266] |
1,42 |
не применима |
1,30 |
9,3 |
[17] |
0,072 |
не применима |
0,087 |
17,2 |
[18] |
0,07 |
не применима |
0,085 |
17,6 |
* метод описанный в [254].
135
В табл. 2.23 представлены сводные результаты сравнения экспериментальных исследований и математического моделирования электромагнитных помех в линиях связи СВТ внутри зданий при широкополосных электромагнитных воздействиях. В целом, по итогам сравнения можно утверждать, что результаты математического моделирования и экспериментальные результаты по анализу электромагнитных помех в линиях связи СВТ внутри зданий при широкополосных электромагнитных воздействиях хорошо согласуются (расхождение не более 18 %). Но при этом, аналитические подходы, рассмотренные в рамках данной работе, имеют ряд существенных ограничений и допущений, что сильно ограничивает их применение на практике.
2.9. Функционирование цифровых элементов средств вычислительной техники при воздействии электромагнитных помех
Критерии оценки статической помехоустойчивости цифровых элементов можно считать установившимися и общепринятыми. Параметры, определяющие статическую помехоустойчивость, приведены в любых технических условиях. Однако для нормального функционирования цифровых СВТ необходимо гарантировать их устойчивость не только к статическим, но и к импульсным помехам (динамическая помехоустойчивость). Импульсные помехи могут иметь большую амплитуду, чем статические, поэтому иногда они более опасны [22, 270].
Анализу динамической помехоустойчивости схем различных типов посвящены работы [22, 125, 155, 270 – 277], в которых рассматривается воздействие импульсных помех на входы цифровых элементов путем экспериментальной оценки. Динамическая помехоустойчивость оценивается, как правило, по отношению к импульсам прямоугольной формы. Одна из причин такого подхода
136
заключается в относительной простоте проведения экспериментальных исследований. Но электромагнитные помехи в реальной ситуации, как уже рассмотрено в предыдущих разделах монографии, представляются импульсами произвольной формы или в виде колебательного процесса. Например, чаще всего, при воздействии ЭСР или других ЭМИ в линиях связи СВТ наблюдаются электромагнитные помехи в виде колебательного процесса на собственной резонансной частоте его корпуса. Поэтому, параметры динамической помехоустойчивости современных типов цифровых элементов предлагается оценить с помощью численных экспериментов в программах схемотехнического моделирования. Численный эксперимент устраняет ограничение на форму и параметры импульсов, но требует адекватной модели исследуемого цифрового элемента. Анализ динамической помехоустойчивости цифровых элементов предлагается проводить с применением запоминающего элемента – триггера, построенного на основе базовых функциональных элементов, поскольку триггер, в конечном счете, фиксирует превращение помехи в ложную информацию, т.е. запоминает сигнал по-
мехи [278].
Следующим шагом для решения задачи анализа динамической помехоустойчивости цифровых элементов является выбор оптимального инструмента. В рамках данной работы рассмотрены три программы с возможность схемотехнического моделирования цифровых элементов СВТ.
Программа Multisim 10.1 (прежде Electronics Workbench)
компании National Instruments [279]. Попытка анализа динамической помехоустойчивости цифровых элементов входящих в библиотеку данной программы выявил тот факт, что напряжение срабатывания цифровых элементов находится на уровне 2,6 В (напряжение питания 5 В) и не зависит от длительности информационных сигналов (наименьшая проверенная длительность сигналов 1 пс). Таким образом, нельзя рекомендовать данный программный продукт для решения данной задачи.
137
Программа Micro-Cap 9 Evaluation (учебная версия) компании Spectrum Software [280]. Анализ динамической помехоустойчивости цифровых элементов можно провести условно, так как в данной программе имеются фиксированные напряжение срабатывания цифровых элементов и фиксированные длительности информационных сигналов. Приведем результаты анализа динамической помехоустойчивости цифровых элементов наиболее распространенной 74 серии (Российские аналоги: серии КР1531, КР1533,
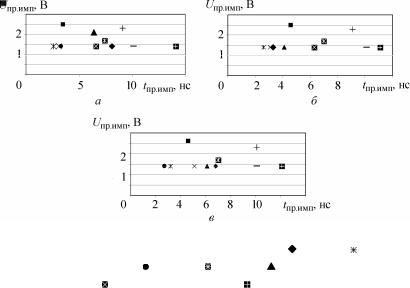
КР1554, КР1564, К555, КР531) в следующем виде (рис. 2.59, Uпр.имп –
напряжение прямоугольного импульса на входе цифрового элемента; tпр.имп – длительность прямоугольного импульса на входе цифрового элемента; в скобках напряжение питания цифрового элемента).
Рис. 2.59. Помехоустойчивость цифровых элементов 74 серии:
а – элемент «НЕ»; |
б – элемент «2И-НЕ»; в – элемент «3ИЛИ-НЕ»; – S (3,3 B); – AS (3,3 B); |
|
– – LS (3,3 B); |
– AC (5 B); – F (3,3 B); – LV (3 B); |
– ACT (5 B); + – HC (5 B); |
|
– H (3,3 B); × – ALS (3,3 B); – HCT (5 B) |
|
На взгляд автора, для проведения анализа динамической по- |
||
мехоустойчивости цифровых элементов |
можно рекомендовать |
|
138
программу ПА-9 (разработка МГТУ им. Н.Э. Баумана) [281 – 283]. ПА9 – комплекс программ, предназначенных для анализа динамики электрических, механических, гидравлических, пневматических, тепловых и разнородных технических систем, основанный на методе физических аналогий. Для интегрирования системы дифференциальных уравнений в ПА-9 применяются неявные А-устой- чивые методы интегрирования: метод Эйлера (1-го порядка точности) и метод трапеций (2-го порядка точности).
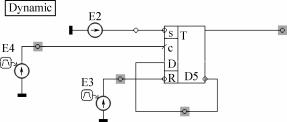
Анализ динамической помехоустойчивости цифровых элементов проводится на основе D-триггеров, работающих в счетном режиме (рис. 2.60). В программном комплексе ПА-9 реализованы имитационные модели для анализа помехоустойчивости элементов ТТЛ и ТТЛШ типа.
Рис. 2.60. Схемотехническое представление имитационной модели для анализа динамической помехоустойчивости цифровых элементов (E4 – источник сигналов для исследования помехоустойчивости; Е2 – источник питания; Е3 – источник сигнала для установки «0»; T – триггер)
В качестве примера проведен анализ динамической помехоустойчивости цифровых элементов 74 серии (7474; 74H74; 74F74). Напряжение питания элементов составляет 5В. Минимальный уровень входного сигнала фиксируется по факту переключения триггера из одного состояния в другое. В качестве прямоугольного сигнала используется сигнал с очень маленькими фронтами и спа-
дом (0,1 нс).
139

На рис. 2.61 представлены результаты анализа динамической помехоустойчивости указанных ранее цифровых элементов.
Рис. 2.61. Динамическая помехоустойчивость цифровых элементов:  – ТТЛ (74);
– ТТЛ (74);
× – ТТЛ (74Н);  – ТТЛШ (74F)
– ТТЛШ (74F)
Следующим шагом в анализе динамической помехоустойчивости цифровых элементов является учет формы сигнала помехи на входе цифрового элемента. Для примера, предположим, что форма электромагнитных помех при воздействии широкополосных источников представляется в следующем виде (рис. 2.62). Длительность сигнала рассматривается по уровню 10 % и 50 % от максимального уровня напряжения. Например, для данных случаев, проведен анализ динамической помехоустойчивости цифрового элемента базовой 74 серии (рис. 2.63).
Рис. 2.62. Пример произвольной формы электромагнитной помехи
Результаты указывают, что если в качестве длительности воздействующей помехи рассматривать уровень произвольного
140