

Расчет стержней и стержневых систем
.pdf
|
|
|
|
|
21 |
|
|
величину в этой точке происходит скачок в сторону сжимаемых этим момен- |
|||||||
том продольных волокон. За точкой B наклон эпюры моментов начинает ме- |
|||||||
няться, сначала он уменьшается до нуля, а затем становится отрицательным, |
|||||||
образуя абсолютный максимум эпюры моментов в данной задаче, после чего |
|||||||
наклон эпюры моментов растет по абсолютной величине, что полностью со- |
|||||||
ответствует эпюре перерезывающих сил на втором участке. Соответственно |
|||||||
постоянной распределенной нагрузке эпюра моментов оказывается квадрат- |
|||||||
ной параболой, выпуклой вверх по правилу зонтика. Как видим, скачок эпю- |
|||||||
ры моментов на конце балки равен опорному моменту. В результате эпюры |
|||||||
полностью проверены. Пропустить ошибку почти невозможно. |
|
|
|||||
y |
|
M |
|
|
Рассмотрим по сути ту же задачу, но с за- |
||
q |
|
P |
креплением на левом торце (рис. 1.13). Опорные |
||||
|
|
|
реакции и в этом случае в начале решения задачи |
||||
|
|
|
|
||||
C |
x X2 |
B |
X1 |
A |
на построение эпюр для консольной балки луч- |
||
ше не определять, но тогда следует рассматри- |
|||||||
|
|
x1 |
x1* |
|
вать равновесие правой части балки. На балке |
||
|
x* |
|
|
получаются снова два участка, границы которых |
|||
|
|
2 |
|
|
отмечены буквами A, B, C. Первым рассматрива- |
||
|
a |
|
a |
|
|||
|
|
|
ем участок AB. Применяем метод сечений для |
||||
|
Рис. 1.13 |
|
|
||||
|
|
|
точки X1. Отбросив левую часть балки с неиз- |
||||
вестными опорными реакциями, изобразим правую ее часть на рис. 1.14. |
|
||||||
y |
|
|
|
|
Для произвольной точки X1 следует задать |
||
|
M(x) Q(x) |
P |
координату. Для этого может быть использована |
||||
|
|
||||||
|
|
координата x1 , измеренная от точки C. Ее, одна- |
|||||
C |
x |
|
X1 |
A |
ко, не слишком удобно изображать на рисунке, |
||
|
да и соотношения для ВСФ, записанные с помо- |
||||||
|
|
x1 |
x1* |
|
|||
|
|
|
щью этой координаты, оказываются несколько |
||||
|
|
2a |
|
|
более громоздкими, чем при использовании дру- |
||
|
Рис. 1.14 |
|
|
гой координаты, обозначенной x1* |
на рис. 1.13 и |
||
|
|
|
1.14. Но чтобы воспользоваться координатой |
x* |
|||
|
|
|
|
|
1 , |
||
следует сначала направить неизвестные силовые факторы в положительную |
|||||||
сторону по правилу знаков сопротивления материалов. Эти направления сле- |
|||||||
дует задавать для той системы координат, для которой будут построены эпюры, |
|||||||
т.е. для координаты без звездочки, совпадающей по направлению с основной |
|||||||
координатой x. Такие направления и показаны на рис. 1.13. (Заметим, что на- |
|||||||
правления сил не зависят от того, используется координата x или x*, но зави- |
|||||||
|
|
|
|
|
1 |
1 |
|
сит направление момента.) Но когда направления всех сил и моментов указаны, |
|||||||
результаты определения неизвестных получатся одинаковыми для любых сис- |
|||||||

22
тем координат, что и позволяет использовать координату x*. Записав уравнения |
|
1 |
|
равновесия части балки на рис. 1.14, получаем уравнения |
|
åPyi = 0 = P + Q(x) , |
(1.17) |
i |
|
åM X1 j = 0 = Px1* − M (x) , |
(1.18) |
j |
|
откуда для участка AB: |
|
Q(x) = P , |
(1.19) |
M (x) = Px* |
(1.20) |
1 . |
|
Если воспользоваться для этого участка координатой |
x1 , то в данной за- |
даче соотношение для перерезывающей силы не изменится: оно не зависит от координаты точки X1. Формула для момента записывается по-другому
åM X1 j = 0 = P(2a − x1) − M (x) , |
(1.21) |
j |
|
поэтому
Q(x) |
q |
M |
|
M(x) |
P |
||
|
X2 |
B |
A |
|
|
x2* |
a |
|
|
|
Рис. 1.15
ти балки на рис. 1.10
(1.22)
По форме соотношение отличается от (1.20), но числовые значения момента не изменятся, поскольку из рис. 1.13 и 1.14 очевидно, что x1* = 2a − x1.
Для участка BC также можно использовать координату x*2 , направленную справа налево. С ее помощью записываем уравнения равновесия правой части балки (рис. 1.15) подобно тому, как это было сделано для час-
åPyi = 0 = P − q(x2* − a) + Q(x) |
, |
(1.23) |
|
i |
|||
|
|
åM X 2 j = 0 = Px2* + M − q |
(x* − a)2 |
− M (x) , |
|
2 |
(1.24) |
||
j |
2 |
|
|
из которых находим выражения для внутренних силовых факторов на втором участке
Q(x) = −P + q(x2* − a) , |
(1.25) |
M (x) = Px2* + M − q |
(x* − a)2 |
|
|
|
2 |
. |
(1.26) |
||
2 |
||||
|
|
|

|
|
|
|
|
|
23 |
|
Дальнейшее построение эпюр и их проверка принципиально не отличаются от |
|||||||
y |
|
|
M |
|
|
случая консольной балки с защемлением |
на |
|
q |
|
P |
правом торце. Получающиеся эпюры представ- |
|||
|
|
|
|
||||
|
|
|
|
|
|
лены на рис. 1.16. |
|
C |
x |
|
B |
|
A |
Отметим еще, что величины внутренних |
|
|
|
|
a |
|
a |
силовых факторов на отдельных участках Q(x), |
|
Эпюра Q(x), кН |
|
M(x) (1.19, 1.20, 1.25, 1.26) в данном примере |
|||||
|
записывали без индексов участка при коорди- |
||||||
7 |
|
|
|
|
|
||
|
|
|
|
|
|
нате x. Это оправдано для балки, поскольку |
|
|
|
|
|
|
|
правило знаков для ВСФ выбрано таким, что |
|
|
|
|
|
|
|
получающиеся графики (эпюры) представляют |
|
C |
|
|
|
B |
A |
собой графики зависимости ВСФ именно |
от |
|
|
|
общей для всей балки координаты x, а не ло- |
||||
|
|
|
|
|
1 |
||
|
|
|
|
|
кальных координат отдельных участков |
* |
|
|
|
|
|
|
x* |
x1 |
|
Эпюра M(x), кН∙м |
2Э |
и x2* . |
|
||||
|
1.1.2. Построение эпюр для балок, опираю- |
||||||
|
|
4,125 |
|
|
|||
|
|
4 |
|
щихся на две шарнирные опоры |
|
||
|
|
|
|
2 |
|
В двухопорных балках, прежде чем опре- |
|
|
|
|
|
|
|
делять перерезывающие силы и изгибающие |
|
C |
|
|
B |
|
A |
моменты в произвольном сечении Qy (x) |
и |
2 |
|
|
|
|
|
M z (x) , необходимо найти опорные реакции из |
|
|
|
|
Рис. 1.16 |
|
уравнения равновесия балки как абсолютно |
||
|
|
|
|
твердого тела методами теоретической механи- |
|||
|
|
|
|
|
|
||
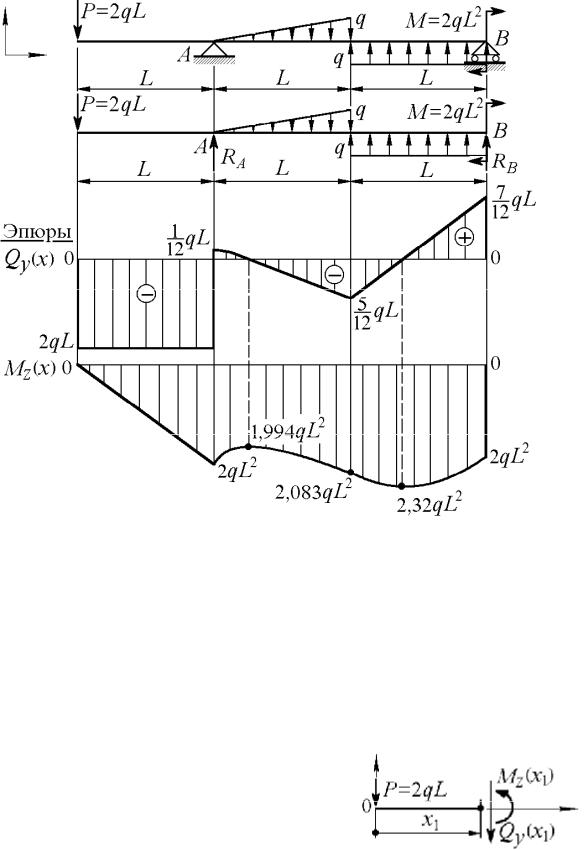
ки. Эти уравнения для балки, представленной на рис. 1.17, имеют вид |
|
||||||
æ |
L ö |
- 2qL2 |
|
1 |
|
2 |
L + 2qL2 |
|
|
å M A = RB 2L + qLç L + |
|
÷ |
- |
|
qL |
|
= 0 , |
||
|
2 |
3 |
|||||||
è |
2 ø |
|
|
|
|
|
|||
å M B = -RA 2L - |
1 |
qL2 |
- 2qL2 + 3qL2 + |
1 |
æ |
L ö |
|
||||||||||
|
|
|
|
qLç L + |
|
÷ |
= 0 . |
||||||||||
2 |
2 |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
è |
3 ø |
|
||||||
Откуда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RB |
= - |
|
7 |
qL , |
RA = |
25 qL . |
|
|
|
|||||||
|
12 |
|
|
|
|||||||||||||
|
|
кН |
|
|
|
|
12 |
|
|
|
|
|
|||||
Если в задаче дано: |
q = 1 |
, L = 1 м; |
тогда |
RB = −0,583 кН , RA = 2,083 кН . |
|||||||||||||
|
|||||||||||||||||
|
|
м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Дальнейшие результаты, записанные в данной задаче в буквенных выражениях, также легко можно переписать в реальных величинах. Следует обратить внимание на то, что минимальная точность представления технического результа-
24
та – три значащие (отличные от нуля) цифры. По двум значащим цифрам зачастую невозможно оценить правильность результата.
y
x
Рис. 1.17
Для проверки правильности определения опорных реакций составим уравнение проекции всех сил, приложенных к балке, на ось y
åPyi = 0 , |
RA + RB |
− 2qL − q L |
||||
25qL − |
|
7 |
|
3 qL = 0 |
2 |
|
|
qL − |
, |
||||
|
|
|||||
12 |
|
12 |
2 |
|
||
Для построения эпюр Qy (x) и M z (x) выделим на балке участки и на каждом из них запишем уравнения равновесия.
+ qL = 0,
0≡0.
y
x
Участок I. 0 ≤ x1≤ L (рис. 1.18).
Рис. 1.18

25
åPyi = −Qy (x1) − P = 0 , Qy (x 1) = -P = -2qL ;
åM X 1 = M z (x1) + Px1= 0, M z (x 1) = -Px 1= -2qLx 1.
Эпюры Q и M ограничены пря-
мыми линиями: |
Q = |
const , а M – |
|
|
y |
|
|
|
|||||||
наклонной прямой линией. |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
x |
||||||
Участок II. |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
L ≤ x2 ≤ 2L (рис. 1.19). |
|
|
|
|
|
|
|
|
|
|
|
||||
åPyi = −Qy (x2 ) − P + RA − |
|
|
|
|
|
|
|
|
Рис. 1.19 |
||||||
-0,5q(x ) ×(x2 - L) = 0, |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
||||||
Qy (x2 ) = -P + RA - 0,5q(x ) × (x2 - L ). |
|
|
|||||||||||||
Из рассмотрения рис. 1.20 |
определим выра- |
|
|
||||||||||||
жение для q(x) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q(x ) |
= |
x2 |
− L |
, |
или q(x ) |
= q |
x |
2 |
− L |
|
. |
|
Рис. 1.20 |
||
q |
|
L |
|
|
|
|
|
||||||||
|
|
|
L |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
С учетом полученного выражения для q(x) уравнение проекций всех сил, приложенных к левой отсеченной части балки, примет вид:
|
|
|
|
|
Qy (x2) = -2qL + |
25 |
qL - q |
(x |
2 |
- L)2 |
|
|
|||||||||||||
|
|
|
|
|
12 |
|
2L |
|
. |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
Запишем уравнение моментов всех сил, приложенных к рассматриваемой |
|||||||||||||||||||||||
части балки, относительно точки с координатой x2 : |
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
åM X |
2 |
= M z (x |
2 |
) + Px |
2 |
- RA (x |
2 |
- L) + q |
(x2 - L)2 |
× |
1 |
(x |
2 |
- L) = 0, |
||||||||
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
2L |
|
3 |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
25 |
|
|
|
|
|
(x |
|
- L)3 |
|
||||||
|
|
|
|
|
M z (x2) = -2qLx 2 + |
12 qL (x2 - L) |
- q |
|
|
26L . |
|
||||||||||||||
|
|
На данном участке зависимость Qy (x) – квадратичная парабола, а M z (x) |
|||||||||||||||||||||||
– кубическая парабола. Кривизна кривых Qy (x) |
|
и |
|
M z (x) отрицательная (вы- |
|||||||||||||||||||||
пуклость вверх), поскольку |
знаки |
у |
|
|
нелинейных |
|
слагаемых q(x2 - L)2 и |
||||||||||||||||||
|
(x2 |
- L)3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2L |
|
q |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
6L |
– отрицательные. После построения эпюры Qy (x) на втором участ- |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ке выясняется, что она на концах интервала (участка) имеет разные знаки, что свидетельствует о том, что эпюра пересекает ось, а эпюра моментов имеет экстремум. Для определения экстремального значения изгибающего момента найдем значение координаты x2экс , при котором перерезывающая сила равна нулю:

|
|
|
|
|
|
|
|
|
|
|
26 |
|
|
|
|
|
|
|
|
|
|
|
|
||
Qy (x |
экс ) = -2qL + 25 qL - q |
(x2экс - L)2 |
|
= 0 Þ x экс |
=1,41L . |
|
|||||||||||||||||||
|
|
|
|||||||||||||||||||||||
|
|
|
|
2 |
|
12 |
|
|
|
|
2L |
|
|
|
|
|
|
2 |
|
|
|
|
|||
Изгибающий момент в этом сечении равен |
M |
z |
(x |
экс ) =1,994qL2 |
. |
|
|
||||||||||||||||||
|
|
2 |
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
На участке III удобнее рассматривать |
|||||||||||
|
|
|
|
|
|
|
|
|
|
равновесие правой части балки. |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Участок III. |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
0 £ x3* £ L (рис. 1.21). |
|
|
|
|
|||||||||||
|
|
|
x3* |
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
åPyi = Qy (x3*) + qx3* - RB = 0, |
||||||||||||||
|
|
Рис. 1.21 |
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
Qy |
|
* |
|
|
|
|
* |
|
|
|
* |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
(x3 ) = RB - qx3 = |
0,583qL - qx3 . |
|||||||||||
|
|
|
|
|
|
åM X 3 |
= −M z (x3*) − M + 0,5qx3*2 − RB x3* = 0 , |
|
|
|
|
||||||||||||||
M |
|
(x |
* |
) |
= −M + 0,5qx |
*2 |
− R |
x |
* |
|
|
|
2 |
+ 0,5qx |
*2 |
− 0,583qLx |
* |
. |
|||||||
z |
|
|
3 |
= −2qL |
|
|
|||||||||||||||||||
|
3 |
|
|
3 |
|
B |
|
|
|
|
|
|
3 |
|
|
3 |
|
||||||||
Из уравнений для перерезывающих сил Q и изгибающих моментов M следует, что эпюра Q ограничена наклонной прямой, а эпюра M – квадратичной параболой. При этом у эпюры перерезывающих сил, как и на участке II, на концах интервала разные знаки. Для определения экстремального значения изгибающего момента на данном участке определим координату x3экс , при которой
Q = 0.
Q y(x3экс ) = 0,583qL - qx 3экс = 0 Þ x3экс = 0,583L , M z (x3экс ) = 2,170qL2 .
Проверим правильность построения эпюр Qy (x) и M z (x) (рис. 1.17). Рас-
сматриваем балку (рис. 1.17) слева направо.
Участок I. Внешняя распределенная нагрузка q = 0. Поэтому перерезывающая сила Q = const . В силу того, что Q < 0, изгибающий момент M
убывает.
Участок II. Внешняя распределенная нагрузка q < 0 и, следовательно, перерезывающая сила Q убывает. В точке A интенсивность нагрузки q = 0 и угол наклона касательной к эпюре Q также равен нулю. Там, где Q > 0, эпюра M возрастает, а где Q < 0 эпюра M убывает.
Участок III. Внешняя распределенная нагрузка q > 0, эпюра Q возрастает; где перерезывающая Q < 0 эпюра M убывает, а там, где Q > 0, эпюра M возрастает. Скачки на эпюре Q будут в тех сечениях, в которых приложены заданные сосредоточенные внешние силы и опорные реакции, а на эпюре изгибающих моментов скачки будут в тех сечениях, в которых приложены внешние сосре-

|
27 |
|
|
|
|
|
||||
|
|
|
|
|
|
доточенные моменты. Причем скач- |
||||
|
|
|
x |
|
|
ки на эпюре М будут в сторону сжа- |
||||
|
|
|
|
|
тых волокон. |
|
|
|||
|
|
|
|
|
|
|
1.1.3. Построение эпюр для стерж- |
|||
|
|
|
* x1* |
|
|
|
ней при растяжении-сжатии |
|||
|
|
|
x |
|
|
|
|
|
|
|
x* |
2 |
|
|
|
Построение эпюр при растяже- |
|||||
|
|
|
|
|
|
|||||
3 |
|
|
|
|
|
нии-сжатии стержней осуществляет- |
||||
|
Рис. 1.22 |
|
|
|||||||
|
|
|
ся в целом так же, как и при изгибе. |
|||||||
|
|
|
|
|
|
|||||
|
|
|
x |
|
|
Поэтому рассмотрим сразу пример, |
||||
|
|
|
|
|
консольный стержень (рис. 1.22), для |
|||||
|
* |
|
|
|
которого требуется построить эпюру |
|||||
|
x1 |
|
|
осевых сил |
N (x) |
и определить сече- |
||||
|
Рис. 1.23 |
|
|
|||||||
|
|
|
ние, в котором внутренняя сила явля- |
|||||||
|
|
|
|
|
|
|||||
|
|
|
|
|
|
ется максимальной по модулю. |
||||
|
|
|
x |
|
|
|
При растяжении-сжатии в попе- |
|||
|
|
|
|
|
|
речном сечении |
стержня |
возникает |
||
x2* |
|
|
|
|
|
один внутренний |
силовой |
фактор – |
||
|
|
|
|
|
продольная сила N(x) или Qx (x) , на- |
|||||
|
|
|
|
|
|
|||||
|
Рис. 1.24 |
|
|
правленная вдоль оси x. Для ее опре- |
||||||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
деления применяется метод сече- |
|||
|
|
|
|
|
x |
|
ний. По тем же правилам, что и |
|||
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
при изгибе, стержень разбивается |
|||
x3* |
|
|
|
|
|
|
на участки, для которых запи- |
|||
|
|
|
|
|
||||||
|
|
|
|
|
|
|
сываются |
уравнения равновесия |
||
|
|
|
|
|
|
|||||
|
Рис. 1.25 |
|
|
|
(сумма проекций на ось x всех сил, |
|||||
|
|
|
|
|
|
|
приложенных к рассматриваемой |
|||
Участок I. 0 ≤ x1≤ L (рис. 1.23). |
|
|
|
отсеченной части стержня). |
||||||
N (x) = −P 1= −2qL . |
|
|
||||||||
|
|
|
−N (x ) − P 1= 0, |
|
|
|||||
Продольная сила на участке I оказывается постоянной, на участке II она меняется по закону прямой линии.
Участок II. L ≤ x2 ≤ 2L (рис. 1.24). − N (x) + q(x*2 − L) − P1= 0 ,
N (x) = q(x*2− L) − P1= q(x*2− L) − 2qL .

28
Рис. 1.26
Участок III. (рис. 1.25) −N (x) − P2 + qL − P1 = 0,
N (x) = −P2 + qL − P1 =
=−3qL + qL − 2qL = −4qL .
Спомощью полученных соотношений строим эпюру осевых сил N(x) (рис. 1.26).
В сечении балки, в котором приложена внешняя сосредоточенная сила, на эпюре N(x) имеется скачок, равный по величине этой силе. Максимальное по модулю значение продольной силы равно
N max = 4qL .
1.1.4. Построение эпюр для стержней при кручении |
|
||||
|
|
|
При |
рассмотрении за- |
|
|
|
|
дачи о кручении |
стержня |
|
|
|
|
необходимо ввести правило |
||
|
|
|
знаков для внутреннего кру- |
||
|
|
|
тящего момента. Будем счи- |
||
|
|
|
тать внутренний крутящий |
||
|
x |
||||
|
|
|
момент |
положительным, |
|
|
|
|
|||
|
|
|
если он вращает рас- |
||
|
|
x |
сматриваемую часть бруса |
||
|
|
против часовой стрелки при |
|||
|
|
|
наблюдении со |
стороны |
|
|
Рис. 1.27 |
внешней нормали n к плос- |
|||
|
|
|
кости поперечного |
сечения |
|
(рис. 1.27). Под внешней нормалью в данном случае понимается нормаль, направленная от рассматриваемой части стержня.
Алгоритм построения эпюр при кручении не отличается от уже рассмотренных случаев. В качестве примера рассмотрим стержень, приведенный на рис. 1.28. На рис. 1.28 с помощью значков плюс и точка в кружках обозначены пары сил, создающие крутящие моменты, пропорциональные величине T. Точ-

29
ка означает острие стрелы, направленной из чертежа, плюс – оперение стрелы, направленной к чертежу.
Дано: T=1 Нм. Постро-
|
ить эпюру Mкр . |
|
|
|
При отсутствии в на- |
||
|
гружении стержня распреде- |
||
|
ленных крутящих моментов |
||
|
эпюра Mкр получается кусо- |
||
|
чно-постоянной. |
AB |
|
|
Участок |
(рис. |
|
Рис. 1.28 |
1.29). В соответствии с ме- |
||
тодом сечений |
рассечем |
||
мысленно брус в произвольной точке X его оси на участке AB поперечным сечением. Отбросим одну из частей стержня. В данном случае удобнее отбрасывать правую его часть, по-
|
|
|
скольку к ней приложено больше внешних на- |
|
|
|
грузок, и заменим ее действие неизвестным |
|
|
|
крутящим моментом M x (x1) (рис. 1.29), кото- |
|
X1 |
||
|
|
|
рый приложим в положительном направлении в |
|
|
|
соответствии с правилом знаков, введенном |
|
|
|
выше. Записывая уравнение равновесия момен- |
|
|
|
тов относительно продольной оси бруса x для |
Рис. 1.29 |
рассматриваемой правой части получим сле- |
||
|
|
|
дующее уравнение |
åM x = 6T + M x (x1) = 0,
X2
Рис. 1.30
M |
(x* ) |
|
|
x |
3 |
X |
3 |
|
|
x3*
Рис. 1.31
из которого получаем значение внутреннего крутящего момента в произвольном поперечном сечении стержня
M x (x1) = −6T .
Как и следовало ожидать, полученное значение крутящего момента оказалось постоянным для всего участка AB (рис. 1.28). Рассуждая аналогично, получаем выражения для крутящих моментов в сечениях на других участках.
Участок BC (рис. 1.30).
åM x = 6T − 3T + M x (x2 ) = 0 , M x (x2 ) = −3T .

30
Участок CD (рис. 1.31).
На участке CD удобнее рассматривать равновесие правой части стержня
å M x = 2T − M x (x3* ) = 0,
M x (x3* ) = 2T .
Заметим, что в опорах стержня при его кручении могут возникнуть крутящие моменты, связанные с трением, но они по условию задачи не заданы. Поэтому в данной задаче в опорах не возникают реакции и опоры никак не влияют на эпюру крутящих моментов (рис. 1.28). В данной задаче вместо проверки правильности определения опорных реакций следует проверить правильность задания исходных данных. Сумма всех внешних моментов относительно оси x должна равняться нулю. В данном случае
å M x = 6T − 3T − 5T + 2T = 0 ,
Легко проверить и правильность полученной эпюры. Скачки на эпюре должны быть равны приложенным моментам, а моменты в торцевых сечениях должны подчиняться принятому правилу знаков для внутренних крутящих моментов.
1.2. Общие теоретические положения построения эпюр внутренних силовых факторов для рам и криволинейных брусьев
Рамой называется стержневая система, стержни которой жестко соединены в узлах и предназначены для работы не только на растяжение (сжатие), но также на изгиб и кручение. Стержни рам могут быть кривыми (рис. 1.32).
Определение внутренних силовых факторов (ВСФ) осуществляется для рам и кривых брусьев в основном также, как и для балок [1]. Но все же это бо-
|
|
R=L |
|
|
лее сложные конструкции, вследствие чего про- |
|
|
|
|
|
цедура построения эпюр имеет для них свои осо- |
||
|
|
|
|
ϕ |
|
бенности [1-2]: |
|
|
|
|
E |
1. Обычно в рамах в плоской задаче прихо- |
|
|
|
P |
F |
|
дится строить все три эпюры: N, Q, M. |
|
|
|
|
|
L |
2. Границами участков при составлении |
|
|
B |
|
C |
|
D |
|
|
|
|
аналитических зависимостей дополнительно яв- |
|||
60° |
|
L |
|
2L |
|
|
L |
|
|
ляются: |
|||
A |
|
|
||||
|
2L |
|
|
1) точки соединения стержней (узлы рамы), |
||
P |
|
|
|
|||
|
|
|
|
|
в том числе изломы оси стержней (рис. 1.32, точ- |
|
|
|
|
G |
|
|
ки B, C, D); |
|
|
|
|
|
2) точки скачкообразного изменения кривиз- |
|
|
|
|
Рис. 1.32 |
|
|
|
|
|
|
|
|
|
|