

2.1. Упругие элементы измерительных преобразователей Разновидности упругих элементов
Входной величиной измерительных преобразователей механических величин может быть сосредоточенная сила, крутящий момент (пара сил), давление газа или жидкости. Эта величина воздействует на упругий элемент и вызывает его деформацию. Деформация воспринимается или непосредственно наблюдателем (как это имеет место в механических показывающих приборах), или последующим измерительным преобразователем с естественной входной величиной в виде механического перемещения (реостатные, емкостные, индуктивные, фото- и другие преобразователи), скорости этого перемещения (индукционные) или механического напряжения (деформации) в некоторой области упругого элемента (тензорезистивные)[1].
Конструкции упругих элементов весьма разнообразны. В динамометрах на большие усилия (больше 10 кН) используются сплошные стержни, работающие на сжатие (рис. 2-1, а) или сдвиг (рис. 2-1, в); для меньших усилий (10 – 1 кН) используют кольца (рис. 2-1, г), а для малых усилий – тонкостенные цилиндры (рис. 2-1, б) и плоские пружины в виде балок (рис. 2-1, д, е). При этом наиболее эффективными оказываются конструкции в виде тонкостенного цилиндра или балки равного сопротивления, когда по всей поверхности упругого элемента механическое напряжение одинаково и материал используется наиболее рационально.
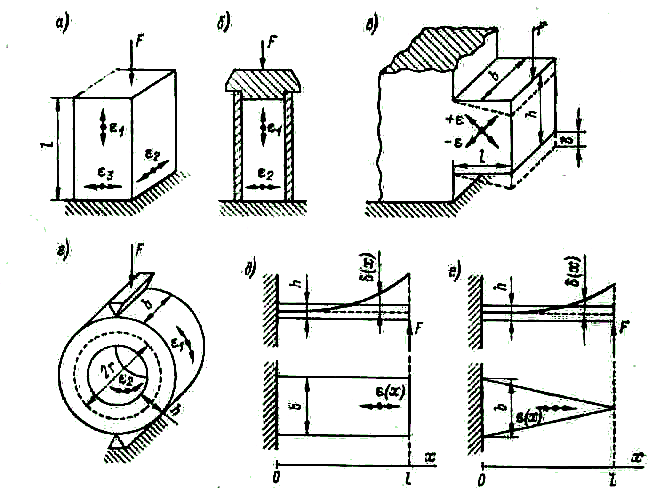
Рис. 2-1
На рис. 2-2 показаны часто применяемые преобразователи крутящего момента М в угловое перемещение φ. Это спиральные пружины (рис.2-2, а,б), сплошные, полые и плоские торсионы (рис. 2-2, в,г,е), подвесы и растяжки (рис.2-2, д).
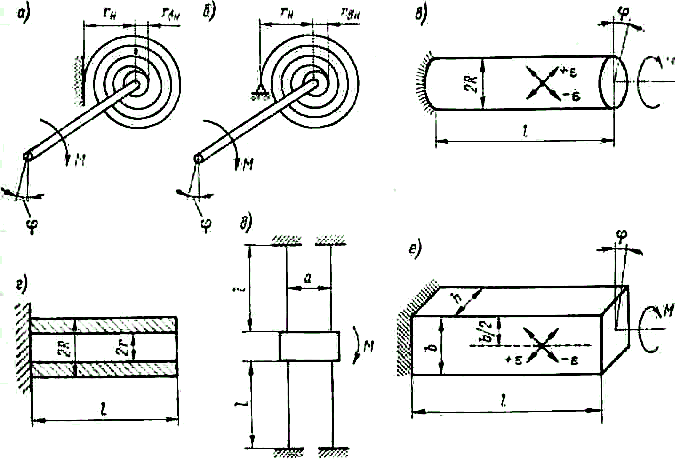
Рис. 2-2
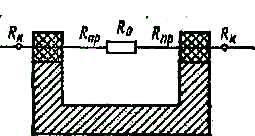
Особенно разнообразны упругие элементы, применяемые для измерения давлений. Это плоские и гофрированные мембраны и мембранные коробки, использующие собственную жёсткость или опирающиеся на внешнюю плоскую пружину или полый тонкостенный цилиндр, на которые наклеены или напылены тензорезисторы. Для получения больших линейных перемещений используются сильфоны и трубки Бурдона, а для получения больших угловых перемещений – спиральные и винтовые трубки с внутренним давлением. Расчёт таких упругих элементов имеется в специальных справочниках.[1]
2.2. Резистивные преобразователи
Принцип действия, общие свойства, область применения.
Делители тока и напряжения. Контактные преобразователи
и преобразователи контактного сопротивления.
Реостатные преобразователи. Тензорезисторы
Сопротивление постоянному току одноэлементного резистивного преобразователя зависит от его длины l, поперечного сечения S и удельного
сопротивления материала :
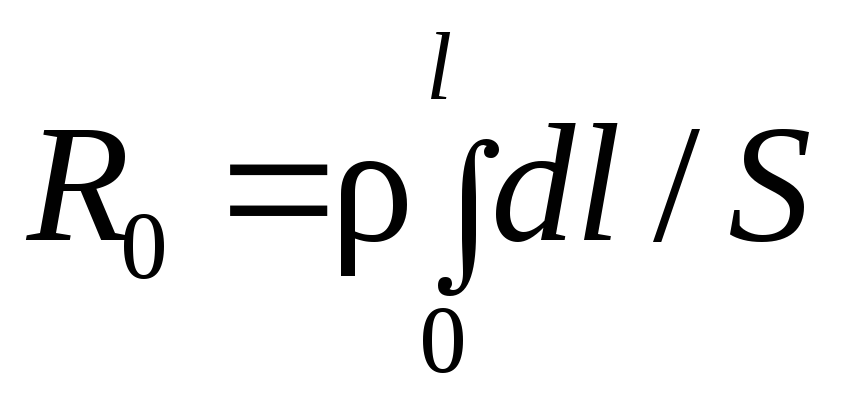 .
.
Если сечение резистора постоянно по его длине, то R = l/S. Применяемые в настоящее время пленочные резисторы, толщина которых определяется технологией нанесения пленки, а ширина и длина сравнимы по значению, характеризуются сопротивлением R площадки, имеющей равные ширину и длину. Таким образом, сопротивление R0 резистора, имеющего длину l и ширину b, определяется формулой R0 = Pl/b (например, при l = 3 мм и b = 1 мм R0 = 3R).
Мощность, выделяемая на резисторе при включении его в измерительную цепь, определяется формулой:
Р=I2R, или Р=U2/R,
где I и U – ток и падение напряжения на резисторе.
Значение допустимой
мощности Pдоп
для резистора
задается, как правило, допустимым
перегревом, поэтому ток ограничивают
через преобразователь
![]() или
напряжение на нем
или
напряжение на нем
![]() ,
гдеRmax
и Rmin
– границы
диапазона, в которых может изменяться
сопротивление преобразователя в
процессе работы. Значение допустимой
мощности определяется площадью
поверхности Sохл,
условиями охлаждения и допустимой
температурой перегрева Θдоп,
а именно:
,
гдеRmax
и Rmin
– границы
диапазона, в которых может изменяться
сопротивление преобразователя в
процессе работы. Значение допустимой
мощности определяется площадью
поверхности Sохл,
условиями охлаждения и допустимой
температурой перегрева Θдоп,
а именно:
Pдоп=ξSохлΘдоп,
где – коэффициент теплоотдачи поверхности, или удельная мощность, при выделении которой на единице поверхности охлаждения температура преобразователя повышается на 1°C по отношению к окружающей среде. В отдельных случаях среди технических характеристик преобразователей указывается допустимая плотность тока и по ней определяется ток.[1]
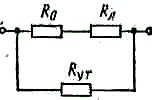
Эквивалентная схема резистивного преобразователя учитывает, что при включении резистора в цепь последовательно с его сопротивлением Ro оказывается включенным сопротивление соединительных проводов и контактов Rл = 2Rпр+ 2Rк, а параллельно – сопротивление изоляции контактами и сопротивление утечек на корпус или на землю, вместе образующих сопротивление Rут (рис. 2-3, а и б).
 a) б)
a) б)
Рис. 2-3
R = (R0 + Rл) Rут/(R0 + Rл + Rут).
Разность между сопротивлениями R и R0 равна
R = R – R0 = (RлRут – R0Rл – R02)/(R0 +Rл+Rут) Rл – R0/Rут,
и относительная погрешность сопротивления R =R/R0=Rл/R0 – R0/Rут. Очевидно, что при малых сопротивлениях R0 погрешность определяется сопротивлением Rл, а при больших сопротивлениях R0 сопротивлением Rут.
При
![]() погрешность R
> 0, а при
погрешность R
> 0, а при
![]() значение R
<0.
значение R
<0.
При включении резистора в цепь переменного тока необходимо учитывать его индуктивность и емкость. Емкость С может быть образована межвитковыми емкостями и емкостями между резистором и близлежащими элементами. Индуктивность прямолинейного участка провода радиусом r0 и длиной l определяется формулой:
![]() .
.
Индуктивность одновиткового контура радиусом r равна
![]() .
.
Индуктивность особенно велика у многовитковых проволочных резисторов. Чтобы ее уменьшить, применяют бифилярную обмотку, показанную на рис. 2-4, а.
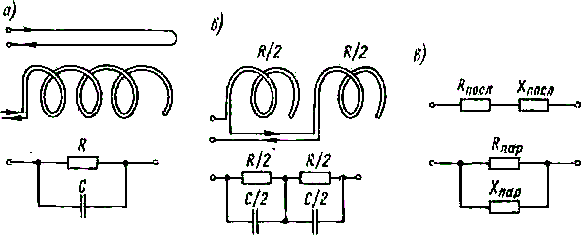
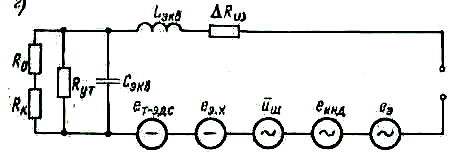
Рис. 2-4
При бифилярной обмотке можно пренебречь индуктивностью, но существенно возрастает емкость между проводами при их сближении. Компромиссным решением является применение бифилярной секционной обмотки, показанной на рис. 2-4, б. Индуктивность L и емкость С являются распределенными параметрами, однако в большинстве случаев их можно учесть как сосредоточенные Lэкв и Сэкв. Наличие индуктивности и емкости приводит как к появлению реактивной составляющей сопротивления, так и к некоторому изменению активной составляющей. Эквивалентная схема (рис.2-4, в) может быть представлена в виде последовательного или параллельного включения активного и реактивного сопротивлений, определяемых при малых Lэкв и Сэкв приближенными формулами:
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Сопротивление переменному току можно характеризовать постоянной времени , равной = L'экв/R или = C'эквR. Лучшие с этой точки зрения резистивные преобразователи характеризуются 10-6 10-7 с. Для преобразователя с =10-6 с изменение модуля сопротивления на 0,01% происходит при частоте напряжения питания 1000 Гц.
Активное сопротивление переменному току R на высокой частоте из-за поверхностного эффекта больше сопротивления постоянному току R0. Для медного провода диаметром 1 мм увеличение сопротивления на 0,01% соответствует частоте 10 кГц.
Во всяком сопротивлении R присутствуют тепловые шумы, средняя мощность которых определяется формулой Найквиста:
![]()
где k – постоянная Больцмана, равная k = 1,38 · 10-23 Дж/К; Т – абсолютная температура; f – полоса частот, к которой относится мощность.
Действующее шумовое
напряжение
![]() зависит от
значения сопротивления и определяется
формулой:
зависит от
значения сопротивления и определяется
формулой:
![]() .
.
В полной эквивалентной
схеме резистивного преобразователя
(рис. 2-4, г)
напряжение шума учитывается в виде
источника электродвижущей силы (ЭДС)
![]() .
.
В зависимости от условий работы преобразователя должны быть учтены те или иные составляющие эквивалентной схемы, однако всегда приходится учитывать сопротивление соединительных проводов и контактов и сопротивление изоляции, поэтому устранению их влияний уделяется особое внимание. Кроме того, при включении преобразователя в измерительную цепь приходится учитывать электрохимическую ЭДС eэх, термо–ЭДС и ЭДС наводок еинд и еэ.
Чувствительность преобразователя и влияние внешних факторов. В общем случае на резистивный преобразователь влияют различные по физической природе величины: электрические (Хэ), магнитные (Хм), механические (Хмх), тепловые (Xт), световые (Хс) и т.д. Полное изменение сопротивления составляет
![]()
Частные производные в правой части уравнения являются чувствительностями к различным входным величинам. Функциональные зависимости между сопротивлением резистивного преобразователя и воздействующим фактором используются для построения соответствующих преобразователей, но в то же время приводят к нестабильности сопротивления и появлению погрешностей. Поэтому при построении преобразователя стремятся к тому, чтобы изменение сопротивления происходило под действием лишь одной измеряемой величины; для этого влияние остальных величин сводят к минимуму конструктивным путем или применением компенсирующих устройств.
Одним из наиболее существенно влияющих факторов является температура. Для чистых металлов и большинства сплавов сопротивление повышается с ростом температуры и приближенно определяется формулой:
![]() ,
,
где R2 и R1 – сопротивления при температурах 2 и 1; – температурный коэффициент сопротивления (ТКС), составляющий для большинства металлов приблизительно 0,004 К-1. Исключение составляют лишь специально разработанные термостабильные сплавы (манганин, константан). Температурная зависимость сопротивления манганина в диапазоне температур 10–35 °С определяется формулой:
![]() ,
,
где (1 1,5)10-5 К-1 и (3 6)10-6К-2.
В более широком диапазоне температур (от –100 до +300 °С) изменение сопротивления достигает ±0,5%. Удельное сопротивление полупроводников с ростом температуры падает, зависимость сопротивления от температуры нелинейная, но в диапазоне температур 10–30 °С можно приближенно считать ТКС равным 0,03 К-1. Для уменьшения температурных погрешностей применяется термостатирование преобразователей и различные схемы температурной коррекции.
Изменение
сопротивлений под действием
однонаправленного механического
напряжения ,
вызывающего относительную деформацию
l=l/l=/Е,
характеризуется коэффициентом
тензочувствительности
![]() .
Для металлических резисторовКT=22,5,
для полупроводниковых KT
=100200.
Чувствительность проводниковых и
полупроводниковых материалов к давлению
окружающей среды характеризуется
барическим коэффициентом
.
Для металлических резисторовКT=22,5,
для полупроводниковых KT
=100200.
Чувствительность проводниковых и
полупроводниковых материалов к давлению
окружающей среды характеризуется
барическим коэффициентом
![]() .Этот эффект
для металлов сказывается лишь при очень
высоких давлениях (больше 108
Па).
.Этот эффект
для металлов сказывается лишь при очень
высоких давлениях (больше 108
Па).
Для измерения высоких и сверхвысоких давлений (до 30108 Па) используются манганиновые преобразователи. Барический коэффициент манганина КР =2,510-11 Па-1. Для работы в активных средах применяются сплавы золота с хромом (КР = 1,0510-11 Па-1). Ведется также исследование полупроводниковых материалов, барические коэффициенты которых значительно выше.
Влияние внешнего
магнитного поля заметно лишь в
преобразователях из специальных
материалов, поэтому в большинстве
случаев влияние магнитного поля на
стабильность резисторов не учитывается.
Для измерения индукции магнитных полей
разработан специальный тип преобразователей
– магниторезисторы, чувствительность
![]() которых
в сильных магнитных полях (В
1 Тл) достигает 20–50
Тл-1.
которых
в сильных магнитных полях (В
1 Тл) достигает 20–50
Тл-1.
Освещенность существенно влияет на сопротивление полупроводниковых резисторов. В специально разработанных фоторезисторах сопротивление при переходе от темноты к полной освещенности уменьшается в 100–1000 раз. На другие полупроводниковые резисторы (терморезисторы, тензорезисторы и т.д.) освещенность влияет, безусловно, меньше, однако может привести к заметной нестабильности их характеристик, поэтому они должны быть экранированы от световых потоков.
Радиоактивное излучение влияет на металлические и полупроводниковые резисторы, вызывая при больших дозах даже необратимые изменения, определяемые как изменениями самого сопротивления, так и ухудшениями свойств изоляции и нарушением герметичности. На основе селенистого кадмия и сернистого кадмия выпускаются специальные резисторы, чувствительные к радиоактивному излучению.
Удельная проводимость некоторых полупроводниковых материалов существенно зависит от напряженности электрического поля. На основе этих материалов (тирит, тервит, винит и т.д.) разработаны и выпускаются нелинейные полупроводниковые резисторы, называемые варисторами. Сопротивление варистора падает при увеличении напряжения на нем, коэффициент чувствительности к напряжению достигает 0,1–1 В-1 при напряжении питания до 10–20 В. Варисторы находят применение в схемах регулирования и стабилизации электрических величин, а также в схемах защиты от перенапряжений.