

книги / Теория механизмов и машин курсовое проектирование
..pdf5. РАСЧЕТ И ПРОЕКТИРОВАНИЕ МАХОВИКА
Основное назначение маховика заключается в ограничении колебаний угловой скорости главного вала машины в установившемся режиме движения[6,12]. Засчетзначительнойнакопленнойэнергиивовремяускоренного движения маховик применяется для преодоления повышенных нагрузок без увеличения мощности двигателя. В машинах ударного действия– молотах, прокатных станах, прессах, автомобилях –он содействует выводу рабочих органов из «мертвых» положений. Ниже рассмотрены основные этапы, необходимые для проектирования маховика.
5.1. Формирование исходных данных для проведения расчета маховика
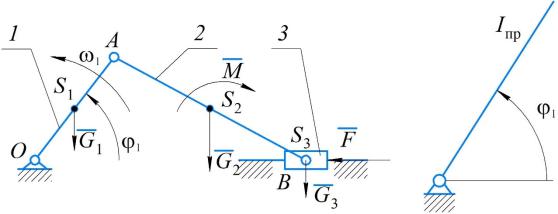
Динамическая модель в виде механизма 1-го класса состоит из стойки и подвижного звена, которое называется звеном приведения. В качестве звена приведения обычно выбирается ведущее звено механизма – кривошип (рис. 5.1, а) или ползун (рис. 5.1, б).
a б
Рис. 5.1. Динамическая модель механизма: а – кривошип; б – ползун
Приведенные параметры модели: приведенный момент инерции Iпр и приведенный момент сил Мпр в случае кривошипа (рис.5.1, а), или же приведенная масса mпр и приведенная сила Fпр для ползуна (рис. 5.1, б).
Iпр и mпр – эквивалент всей инертности механизма, а Мпр и Fпр –
эквивалент заданной нагрузки, приложенной к механизму. Критерии выбора параметров динамической модели должны обеспечить идентичность законов движения звена приведения и реального механизма.
100
В основе приведения масс или моментов инерции положено равенство кинетической энергии Т всего механизма и кинетической энергии Тм
его модели: |
Т = Тм. |
|
(5.1.1) |
|
|
|
|||
Кинетическая энергия всего механизма равна сумме кинетических |
||||
энергий всех его звеньев: |
|
|
|
|
n |
1mjVs2j |
k |
1Is j ω2j , |
|
T |
|
(5.1.2) |
||
j 1 |
2 |
j 1 |
2 |
|
где: mj –массазвена; Isj –моментинерциизвенаотносительноегоцентрамасс; Vsj – абсолютная скорость центра масс;
ωj – угловая скорость звена.
Приведенный момент инерции (приведенная масса) – условная величина, обладая которой, динамическая модель имеет кинетическую энергию, равную кинетической энергии реального механизма в данном положении.
a б
Рис. 5.2. Схема кривошипно-ползунного механизма (а); динамическая модель (б)
Например, в случае кривошипно-ползунного механизма (рис. 5.2):
T = 1 (I |
∙ω2 |
+ m ∙V2 + I |
∙ω2 |
+ m ∙V2 |
+ m ∙V2 ); T |
M |
= |
|
1 I |
ω2. |
|
|
|
|
||||||||||||||||
2 |
s1 1 |
1 |
s1 |
s2 |
2 |
|
|
|
2 |
s2 |
|
|
|
3 |
|
s3 |
|
|
2 |
пр 1 |
|
|
|
|
|
|||||
Следовательно: Iпр = Is + Is |
|
ω |
2 |
2 |
|
+ m |
|
Vs |
1 |
|
2 |
+ m |
|
Vs |
2 |
+ m |
|
|
Vs |
2 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
3 |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω1 . |
||||||||||||||
В общем случае для какого1 2-либоω1 |
i-го положения1 ω1 |
механизма2 ω1 |
: |
3 |
|
|||||||||||||||||||||||||
|
|
|
n |
|
ωj |
|
2 |
|
|
|
k |
|
|
Vsj |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
Iпрj = j = 1 Isj |
|
|
|
|
+ |
j = 1 mj |
|
|
. |
|
|
|
|
|
|
|
|
(5.1.3) |
||||||||||
|
|
|
ω1 |
|
|
ω1 |
|
|
|
|
|
|
|
|
||||||||||||||||
По аналогии (5.1.3) для приведенной массы mпр (рис. 5.1, б) следует:
101

n |
= 1 mj |
Vsj |
2 |
k |
= 1 Isj |
ωj |
2 |
, |
(5.1.4) |
|
|
|
|
||||||
mпрj = ∑j |
V1 |
|
+ ∑j |
V1 |
|
|
где V1 – скорость точки приведения.
Приведенным моментом сил (приведенной силой) называется момент (сила), условно приложенный к звену приведения, развивающий мгновенную мощность, равную мгновенной мощности всех сил и момен-
тов сил, приложенных к звеньям механизма в данном положении N = Nм:
|
Mпрi |
= jn= 1 F |
|
V cos α |
|
+ |
|
jl = 1 |
GjVs cos β |
j |
+ |
|
jk |
|
ω |
|
|
(5.1.5) |
|||
|
j |
j |
ω1 |
j |
|
j |
ω1 |
|
= 1 Mj ω1 |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
j |
|
|
|||||
где αj |
угол между∑направлением |
силы |
Fj и скоростью Vj точки ее при- |
||||||||||||||||||
|
∑ |
|
|
|
|
|
∑ |
|
|
|
|
, |
|
||||||||
ложения; βj – угол между направлением силы тяжести Gj и скоростью Vsj
центра тяжести звена j; j – отношение угловой скорости звена j к угловой
1
скорости первого звена с учетом знака. Для схемы рис. 5.2 NM = Mпр∙ω1.
N = G1∙Vs1∙cos G1 |
̂Vs1 |
+ G2∙Vs2∙cos G2 ̂Vs2 |
|
+ F∙Vs3∙cos F ̂Vs3 |
+ M∙ω2; |
|||||||||||||||||||
M |
|
= |
G1 |
∙Vs |
∙cos G1 |
̂Vs |
1 |
+ G2∙Vs ∙cos G2 |
̂Vs |
2 |
|
+ F∙ |
Vs |
3 |
∙cos F ̂V |
+ M∙ |
ω |
2 . |
||||||
пр |
|
1 |
|
|
|
|
|
2 |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
ω1 |
|
|
|
|
|
ω1 |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 s3 |
|
|
ω1 |
||||||
|
|
Учитывая, что Мпр = Fпр·l1, значение приведенной силы: |
|
|
|
|
||||||||||||||||||
Fпрi |
= ∑jn= 1 Fj |
Vj |
|
|
|
+ ∑jl = 1 Gj |
|
Vsj |
|
|
|
+ ∑jk= 1 Mj |
ωj |
. |
|
|
|
|||||||
|
cos αj |
|
|
|
cos βj |
|
|
|
|
(5.1.6) |
||||||||||||||
V1 |
|
V1 |
|
V1 |
|
|
||||||||||||||||||
Приведенные параметры Iпр, mпр, Mпр, Fпр зависят от обобщенной
координатыφ1,таккаквэтисоотношениявходятотношенияскоростейили их аналогов. У большинства механизмов они изменяются по периодическим законам. Однако у некоторых механизмов, например зубчатых, они постоянны.
Дляполучениязначенийприведенныхпараметровдинамическоймодели строятся планы скоростей или аналогов скоростей для ряда положений механизма и затем используются формулы (5.1.3)–(5.1.6).
5.2. Коэффициент неравномерности хода
Колебание скорости ведущего звена в режиме установившегося неравномерного движения вследствие периодического изменения приведенных моментов (сил) и приведенных моментов инерции (масс), характери-
зуется коэффициентом неравномерности хода δ= ωmax – ωmin.
ωcp
Здесь: ωmax и ωmin –максимальная и минимальная угловые скорости;
102
ω |
– средняя угловая скорость; ω |
= |
|
1 |
φц ωdφ, где φц – угол поворота ве- |
|
φ |
||||||
ср |
ср |
|
0 |
|||
|
|
|
|
ц |
|
|
дущего звена за один цикл.
Истинные угловые скорости машины отличаются от средней на величину ± ∆ω:
ωmax = ωcp + ∆ ωmax; ωmin = ωcp – ∆ ωmin |
(5.2.1) |
Для большинства технических расчетов принимают ∆ωmax = ∆ωmin. В этом случае:
ωcp = ωmax 2+ ωmin.
Тогда максимальное и минимальное значение угловой скорости в зависимости от δ и ωср определяются формулами:
ω |
= ω 1 + δ |
; ω |
min |
= ω |
cp |
1 – δ |
(5.2.2) |
|
max |
cp |
2 |
|
|
2 |
|
||
|
|
|
|
|
|
|
||
Для каждого типа машин в зависимости от назначения устанавливается определенный коэффициент неравномерности хода δ (табл. 5.1)
Значение коэффициента δ |
Таблица 5.1 |
|
|
|
|
Тип машины |
δ |
|
|
Насосы |
0,03–0,20 |
|
|
Металлорежущие станки |
0,02–0,05 |
|
|
Двигатели внутреннего сгорания; |
0,006–0,013 |
|
|
компрессоры |
|
|
|
Электрогенераторы постоянного тока |
0,005–0,010 |
|
|
Электрогенераторы переменного тока |
0,003–0,005 |
|
|
Так как значения величины δ малы, то ошибка в определении ωср не превышает = 2δ ∙100 %. Степень неравномерности δ для каждой машины
выбирают из условия выполнения технологического процесса и допускаемыхдинамическихнагрузок.Коэффициентδхарактеризуетизменениескорости ведущего звена, но не показывает динамику движения. Сравнительнаяоценкадинамическихсвойствмеханизмадляпериодаустановившегося
движенияпроизводитсяпокоэффициентудинамичностиKд = max , гдеεmax
2cp
– максимальное угловое ускорение в цикле. Чем больше коэффициент Kд, тем значительнее инерционные нагрузки.
103
5.3. Расчет и построение графиков моментов сил, работ и избыточных работ
Для проведения дальнейших расчетов параметров маховика необходимо определить моменты сил, действующие на звенья механизма и их работу.
Возможны следующие случаи:
1.Момент Мс сил сопротивления постоянен, а момент движущих сил Мд изменяется периодически в установившемся движении. Это характерно для двигателей внутреннего сгорания какой-либо машины, имеющей постоянное сопротивление.
2.Момент движущих сил постоянен, но периодически изменяется
момент Мс сил сопротивления, что характерно для большинства техноло-
гических машин: металлорежущих станков, прессов, компрессоров и т.п. 3. Периодически изменяются как моменты движущих сил, так и моменты сил сопротивления, например в случае если двигатель внутреннего
сгорания соединен с рабочей машиной.
При дальнейшем изложении материала рассматриваются случаи, когда момент сил сопротивления Мс зависит только от положения звена приведения Mc = Mc(φ), а Мд = const или когда Мс = const, а момент движущих
сил Мд зависит только от положения звена приведения Мд = Мд(φ). Оба
случая изучаются по аналогичным методикам.
Существуют несколько методов расчета маховика, общим для которых является этап определения моментов сил и избыточных работ.
Моменты Мс и Мд вычисляются по формуле(5.1.3), где за звено при-
ведения принят вал, на котором расположен маховик. При использовании (5.1.3) следует помнить, что α и β меняются от 0°до 360°, поэтому необходимо учитывать знаки косинусов этих углов.
В качестве примера рассматривается случай Мс = Мс(φ), Мд = const. Вычислив Мс для12–24 положений звена приведения за один цикл установившегося движения, строят график зависимости Мс = f(φ) в масштабах μM, H∙ммм и μφ, радмм (рис. 5.3, а). На этом рисунке отрицательные значения Мс
отложены выше оси 0φ, а положительные – ниже.
ГрафикработсилсопротивленияАс обычнополучаетсяпутемграфического интегрирования зависимости Мс = f(φ) по алгоритму:
104
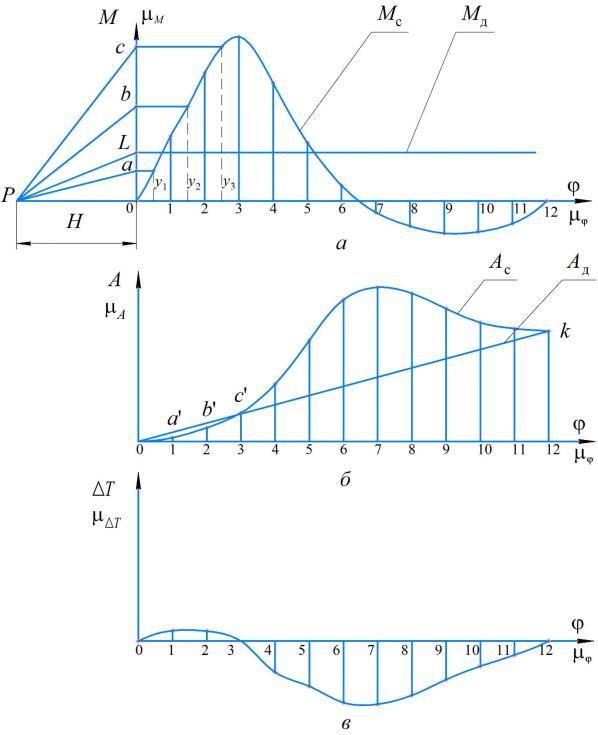
Рис. 5.3. Построение графиков работ:
а графики моментов сил; б – графики работ, полученных графическим интегрированием; в – график избыточных работ
1. Проводятся вертикальные линии у1, у2 … уn, соответствующие се-
рединам интервалов 01, 12, 23 …оси 0φ, и затем на оси ординат откладываются отрезки 0а = у1, 0b = у2, 0с = у3 и т.д. (рис. 5.3, а).
105

2.На продолжении оси 0φ задается точка p. Отрезок 0р = Н, мм – полюсное расстояние. Точку p соединяют прямыми с точками а, b, с (см.
рис. 5.3, а).
3.Затем на следующем графике (см. рис. 5.3, б) из точки 0 соответственно в интервале 0–1 проводится прямая 0а' параллельно лучу ра (см. рис. 5.3, а); в интервале 1–2 – прямая а'b' параллельно лучу рb, в интервале 2–3 – b'c' параллельно pc и т.д. (см. рис. 5.3, б).
4.Полученные точки а', b', … соединяются плавной кривой, характеризующейграфикзависимостиработысилсопротивленияотуглаповорота
звена приведения: Ac Mc d (см. рис. 5.3, б).
Масштаб работ определяется формулой А = M∙ ∙H, Джмм .
Так как Мд = const,то график Ад − прямая линия, наклоненная под
некоторым углом к оси 0φ и выходящая из точки 0 в точку k (см. рис. 5.3, б) в силу того, что в начале и конце цикла установившегося движения работы сил сопротивления и движущих сил равны между собой.
Тогда по свойству производной момент Мд = ddАд представляет собой
прямую линию (см. рис. 5.3, а), проведенную параллельно оси 0φ из точки L, лежащей на прямой PL, параллельной прямой 0K (см. рис. 5.3, б).
Для построения графика избыточных работ Аизб = T следует из ординат графика работ движущих сил вычесть ординаты графика работ сил сопротивления (см. рис. 5.3, в). При этом T = A.
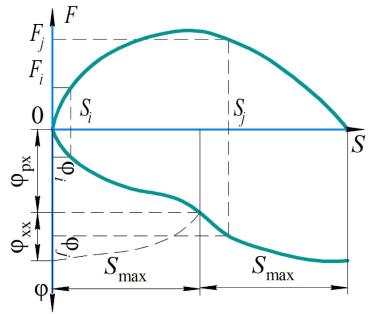
Замечание. Внешниесилы F,действующиеназвенья механизма,могут быть заданы аналитически или графически как в зависимости F = F(φ) от угла поворота φ звена приведения, так и от перемещения S звена, к которому они приложены, т.е. F = F(S). Если реализуется зависимость F =
F(φ), то для положения φ = φi: Fi = F(φi). В случае F = F(S) необходимо из результатов кинематического анализа для каждого текущего φi определить
Si, а затем – Fi.
Для каждого типа машин следует строго учитывать этапы рабочего процесса и холостого хода с тем, чтобы правильно определить угол α между вектором силы F и вектором скорости точки ее приложения.
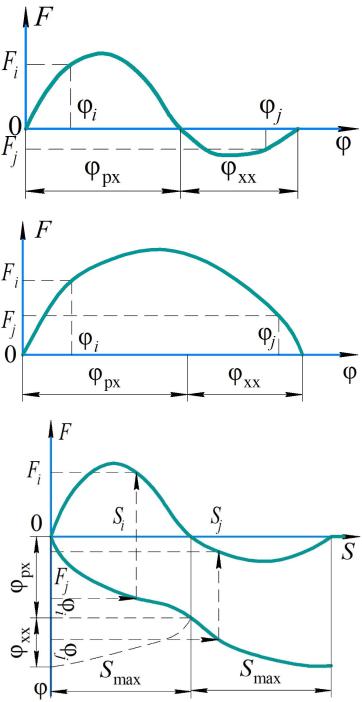
Примеры изменения силы F представлены в табл. 5.2.
106
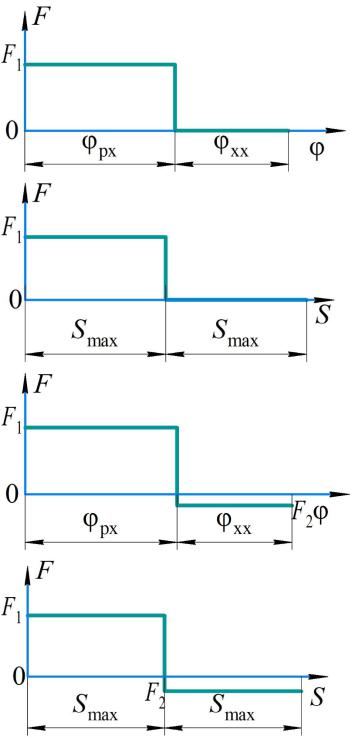
Таблица 5.2 Примеры определения параметров силы сопротивления F
с помощью диаграмм
|
|
Параметры силы |
||
№ |
Диаграмма |
|
|
|
рабочий |
холостой |
|||
|
|
|||
|
|
ход |
ход |
|
|
|
|
|
|
1 |
|
F = F1 = |
F = 0 |
|
|
|
const, |
|
|
|
|
α = 180° |
|
|
|
|
|
|
|
2 |
|
F = F1 = |
F = 0 |
|
|
|
const, |
|
|
|
|
α = 180° |
|
|
|
|
|
|
|
3 |
|
F = F1 = |
F = F2 = |
|
|
|
const, |
const, |
|
|
|
α = 180° |
α = 180° |
|
|
|
|
|
|
4 |
|
F = F1 = |
F = F2 = |
|
|
|
const, |
const, |
|
|
|
α = 180° |
α = 180° |
|
|
|
|
|
|
|
|
|
107 |
|
Продолжение табл. 5.2
|
|
Параметры силы |
||
№ |
Диаграмма |
|
|
|
рабочий |
холостой |
|||
|
|
|||
|
|
ход |
ход |
|
|
|
|
|
|
5 |
|
F = Fi при |
F = Fj при |
|
|
|
φ = φi, |
φ = φj, |
|
|
|
α = 180° |
α = 180° |
|
|
|
|
|
|
6 |
|
F = Fi при |
F = Fi при |
|
|
|
φ = φi, |
φ = φi, |
|
|
|
α = 180° |
α = 0° |
|
|
|
|
|
|
7 |
|
F = Fi при |
F = Fi при |
|
|
|
φ = φi, |
φ = φi, |
|
|
|
α = 180° |
α = 180° |
|
|
|
|
|
|
108
Окончание табл. 5.2
|
|
Параметры силы |
||
№ |
Диаграмма |
|
|
|
рабочий |
холостой |
|||
|
|
|||
|
|
ход |
ход |
|
|
|
|
|
|
8 |
|
F = Fi при |
F = Fi при |
|
|
|
φ = φi, |
φ = φi, |
|
|
|
α = 180° |
α = 0° |
|
|
|
|
|
|
5.4. Определение момента инерции маховика по методу Н.И. Мерцалова
При постоянном моменте инерции маховика:
Iм = |
(A |
изб |
– T ) |
– (A – T |
) |
|
|
|
|
зв |
max2 |
изб |
зв min, |
(5.4.1) |
|||
|
|
|
|
ωcp∙δ |
|
|
|
|
где (Aизб – Tзв)max и (Aизб – Tзв)min – соответственно максимальные и минимальные значения избыточных работ и кинетической энергии звеньев.
МетодМерцаловаявляетсяприближенным,таккакрасчетведетсяпо средней угловой скорости ведущего звена и невозможно указать те поло-
жения механизма, где ω = ωmax и ω = ωmin.
Алгоритм определения момента инерции маховика
Порядок и результаты проектирования маховика представлены на рис. 5.4.
1. По формуле(5.1.5) строится график приведенного момента сил сопротивления или движущих сил в масштабах μM и μφ (рис. 5.4).
109