

книги / Технические измерения и приборы
..pdfНачальное и конечное значение шкалы – наименьшее и наи-
большее значение измеряемой величины, указанное на шкале, соответственно.
Диапазон показаний – область значений шкалы, ограниченная конечным и начальным значениями шкалы.
Диапазон измерения измерительного прибора или измери-
тельного преобразователя – область значений измеряемой величины, для которой нормированы допускаемые погрешности средства измерений. Применительно к измерительным устройствам вообще диапазон измерений часто называют рабочим диапазоном преобра-
зований.
Пределы измерений – наибольшее и наименьшее значения диапазона измерений.
Шкалы приборов бывают односторонними, двусторонними и безнулевыми. В односторонних шкалах один из пределов изме-
рения прибора равен нулю, например шкала 0…100 °C. В двусторонних шкалах нулевое значение расположено внутри шкалы, например шкала – 50…0…100 °C. В безнулевых шкалах на шкале нет нулевого значения, например шкала 200…600 °С.
При оценке значения физической величины по шкале измерительного прибора необходимо учитывать, что число делений шкалы согласовано с классом точности измерительного прибора в первом приближении в соответствии с формулой
n |
10 |
, |
(2.1) |
|
2 |
||||
|
|
|
где n – число делений, – класс точности.
Поэтому не следует пытаться на глаз оценить доли деления и приводить их в результате измерения. Известно, что при определении долей деления на глаз операторы допускают систематическую ошибку, доходящую до 0,2 деления. По указанным причинам значение измеряемой величины должно быть считано по шкале с погрешностью в половину деления. При этом необходимо пользоваться правилами округления:
31
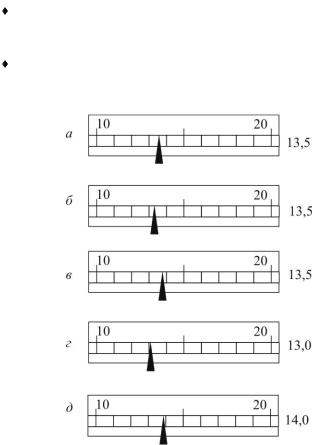
если указатель располагается в середине деления (рис. 2.3, а), слева (рис. 2.3, б) или справа (рис. 2.3, в) от нее, то в значении измеряемой величины указывается половина деления;
если указатель располагается вблизи отметки шкалы справа (рис. 2.3, г) или слева (рис. 2.3, д) от нее, то результат округляется до значения, соответствующего этой отметке.
Рис. 2.3. Типичные случаи определения показаний измерительных приборов
2.2. ТИПОВЫЕ СТРУКТУРНЫЕ СХЕМЫ СРЕДСТВ ИЗМЕРЕНИЙ
Измерительные средства разделяются по методу преобразования на устройства прямого действия, или прямого преобразования, или непосредственной оценки и на средства уравновешивающего преобразования, или компенсационного преобразования, или сравнения.
32

Структурные схемы измерительных устройств электрических и неэлектрических величин определяются используемым методом преобразования.
2.2.1. Структурные схемы средств измерения неэлектрических величин
Схемы для измерения неэлектрических величин могут быть довольно сложными, так как кроме измерительных преобразователей в схему могут входить усилители, выпрямители, источники питания, двигатели, неэлектрические преобразователи (например, механические, оптические).
В приборах прямого преобразования результат измерения получается после ряда последовательных преобразований измеряемой величины (рис. 2.4).
X |
Э |
Эi |
|
Э' |
|
УС |
1 |
||
|
Пр |
ИЦ |
Г |
|
|
|
|
|
|
|
Э=f (x) |
Э1=f (Э) |
|
=f (Э') |
|
|
1 |
Рис. 2.4. Структурная схема прибора прямого преобразования
В измерительном преобразователе Пр происходит преобразование измеряемой неэлектрической величины X в электрическую Э. Эта величина в общем случае может быть преобразована в измерительной цепи ИЦ еще несколько раз. Затем величина Эi = f (Э) усиливается в случае необходимости усилителем УС и поступает в измеритель Г, преобразующий ее в отклонение  подвижной системы. Погрешность такой схемы измерения величины X складывается из погрешностей всех последовательно включенных элементов.
подвижной системы. Погрешность такой схемы измерения величины X складывается из погрешностей всех последовательно включенных элементов.
С целью уменьшения этих погрешностей можно использовать метод сравнения, структурная схема которого представлена на рис. 2.5.
33
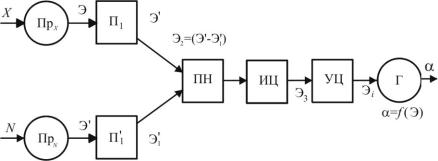
Рис. 2.5. Структурная схема прибора сравнения
Здесь имеются две самостоятельные, как правило, одинаковые цепи преобразования, в одну из которых включен рабочий преобразователь Прх, а во вторую – нерабочий преобразователь ПрN. После первого преобразования неэлектрических величин X и N в электрические Э1 и Э'1 установлен преобразователь недокомпенсации (ПН), который реализует функцию разности выходных параметров Э1 и Э'1 преобразователей П1 и П'1. После звена ПН преобразование полученной величины Э2 = (Э1 – Э'1) происходит тем же путем, что и в предыдущем случае прямого преобразования.
Приборы, построенные по схеме рис. 2.5, позволяют исключить дополнительные погрешности, обусловленные влиянием внешних факторов на преобразователи Прx и П1, погрешности же всех звеньев, в том числе измерителя Г, входят целиком.
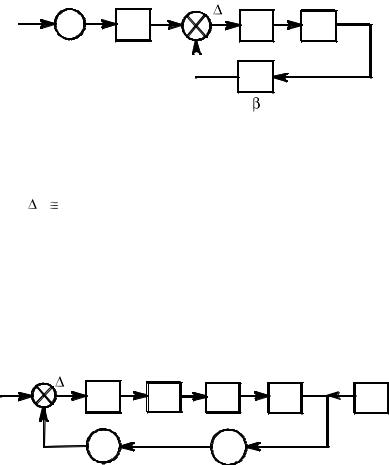
Дальнейшее снижение погрешностей достигается с помощью компенсационного метода преобразования и применением отрицательной обратной связи (ООС). Структурная схема такого прибора, изображенная на рис. 2.6, представляет собой схему с компенсацией электрической величины на выходе преобразователя.
На схеме напряжение Ux измерительной цепи, модулированное по величине измеряемым параметром X, компенсируется напряжением Uк, получаемым от компенсационной цепи (КЦ).
34
Х |
|
Э |
U x |
U |
|
Пр |
ИЦ |
||||
|
|
|

 U k
U k
|
Yвых |
УС |
Г |
КЦ |
|
Рис. 2.6. Структурная схема прибора с электрической ООС
Компенсационная цепь питается выходным напряжением усилителя (УС) с таким расчетом, чтобы разность напряжений была близка к нулю ( U 0). Мерой измеряемой неэлектрической величины является величина Yвых, воздействующая на КЦ. Измеритель Г в данном случае является механическим устройством, например реохордом, включенным в цепь моста или компенсатора. В этом случае общая погрешность измерения складывается из погрешности измерительного преобразователя Пр, измерительной и компенсационной цепей.
Исключение погрешностей этих узлов может быть достигнуто в компенсационных приборах с компенсацией измеряемой неэлектрической величины (рис. 2.7).
Х |
X |
Э1 |
|
Э2 |
Э3 |
|
|
Пр |
ИЦ |
УС |
РУ |
ИП |
|
|
|
|||||
|
Х k |
|
У |
|
|
|
|
|
ОП |
Г |
|
|
|
|
|
|
|
|
Рис. 2.7. Структурная схема прибора с компенсацией неэлектрической величины
Обратный преобразователь (ОП) преобразует выходную электрическую величину Y в неэлектрическую Хk однородную с измеряемой величиной X. Разность между X и Xk, преобразованная в электрическую величину Э1 и усиленная усилителем (УС), воздействует на регулирующее устройство (РУ), которое связано с источником питания
35
(ИП). В результате этого на измеритель Г и обратный преобразователь подается такая электрическая величина Y, которая, будучи преобразована в неэлектрическую величину Хk, компенсирует измеряемую величину X. Таким образом, вся цепь прямого преобразования оказывается охваченной обратным преобразованием, и при Х << Х погрешность всех преобразующих звеньев практически исключается. Общая погрешность измерения складывается только из погрешностей измерителя Г и ОП. Следовательно, по сравнению с предыдущим случаем здесь вместо погрешности прямого преобразователя появляется погрешность обратного преобразователя. Реальный выигрыш в точности при переходе от схемы на рис. 2.6 к схеме на рис. 2.7 может быть получен лишь в том случае, когда погрешность обратного преобразователя будет меньше погрешности прямого преобразователя.
2.2.2. Структурные схемы измерительных систем
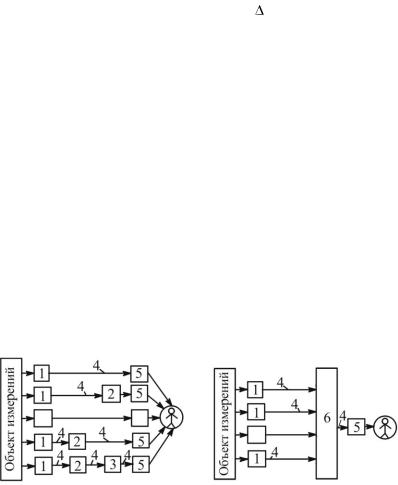
На рис. 2.8 показаны структурные схемы измерительных систем, используемых для автоматического контроля, регулирования и управления технологическими процессами.
Измерительная система, построенная по схеме 2.8, а, обеспечивает одновременное измерение и регистрацию всех величин объекта измерения, а измерительная система, построенная по схеме 2.8, б, – поочередно измерение и регистрацию.
а |
б |
Рис. 2.8. Структурные схемы измерительных систем
36
Измерительная информация формируется с помощью первичных измерительных преобразователей 1 и посылается в виде сигналов в канал связи 4.
Взависимости от типа измеряемой физической величины, принципа действия первичного измерительного преобразователя и расстояния, на которое необходимо передать информацию, в состав измерительной системы могут быть включены помимо первичных измерительных преобразователей промежуточный 2 (см. рис. 2.8, а) и передающий 3 измерительные преобразователи. При этом измерительный преобразователь может располагаться территориально около первичного или около прибора 5, измеряющего сигнал, поступающий из канала связи, представляющий последний в форме, удобной для восприятия человеком, и осуществляющий регистрацию. Измерительный прибор 5 называют вторичным прибором, считая при этом, что все измерительные преобразователи, работающие с ним в комплекте, являются первичными.
Визмерительной системе (см. рис. 2.8, б) с поочередным подключением первичных измерительных преобразователей к прибору 5 применяется коммутатор 6, который следует рассматривать как вспомогательное устройство. Для простоты на рис. 2.8, б показана измерительная система, в составе которой имеются только первичные измерительные преобразователи 1. В общем случае в нее могут быть включены промежуточные и передающие измерительные преобразователи. При этом выходные сигналы преобразователей всех измеряемых величин
вотличие от системы, построенной по схеме рис. 2.8, а, должны быть одинаковыми по природе и диапазону измерений, что необходимо для обеспечения возможности их измерения и регистрации одним и тем же прибором 5.
2.3. СТАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ И ПАРАМЕТРЫ
ИЗМЕРИТЕЛЬНЫХ УСТРОЙСТВ
Измерительное устройство принято рассматривать как некоторый преобразователь, служащий для преобразования входного сигнала X в выходной Y. Такое представление измерительных устройств
37

позволяет применять при анализе систем аппарат теории автоматического регулирования.
Статическое состояние (режим работы) измерительного устройства – состояние, при котором значения входного X и выходного Y сигналов не изменяются, иначе, стационарное или равновесное состояние.
Статическая характеристика измерительного устройства – функциональная зависимость выходного сигнала от входного сигнала в статическом режиме работы. Статическая характеристика описывается в общем случае некоторым нелинейным уравнением (уравнением преобразования)
Y f (X ) . |
(2.2) |
Для измерительных преобразователей и измерительных приборов с неименованной шкалой или со шкалой, отградуированной
вединицах, отличных от единиц измеряемой величины, статическую характеристику принято называть функцией преобразования. Для измерительных приборов иногда статическую характеристику назы-
вают характеристикой шкалы.
Градуировочная характеристика – зависимость между значе-
ниями величин на выходе и входе средства измерения, составленная
ввиде таблицы, графика или формулы.
На рис. 2.9 показаны виды статических характеристик измерительных устройств.
За исключением специальных случаев, основное требование, предъявляемое к статической характеристике измерительных устройств, сводится к получению линейной зависимости между выходной и входной характеристикой. На практике это требование реализуется в общем случае только с некоторой погрешностью, принятой заранее.
Кроме статической характеристики для определения метрологических свойств измерительных устройств используется ряд параметров.
На статической характеристике 1 (см. рис. 2.9) графически представлены понятия диапазона показаний, диапазона измерений, нижнего Xн, Yн и верхнего Xв, Yв пределов измерений.
38
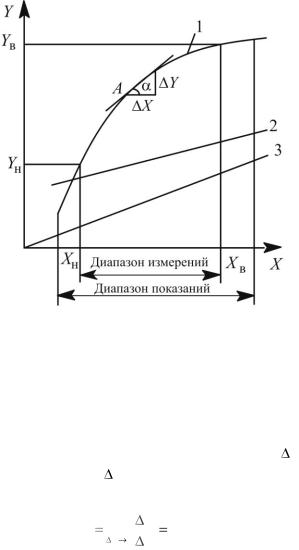
Рис. 2.9. Статическая характеристика измерительного устройства: 1 – нелинейная, 2 – линейная, 3 – пропорциональная
Диапазон измерений определяется разностью значений верхнего и нижнего пределов измерений (Xв – Xн; Yв – Yн). Для количественной оценки влияния на выходной сигнал измерительного устройства входного сигнала в произвольной точке (см. рис. 2.9) статической характеристики служит предел отношения приращения Y выходного сигнала к приращению X входного сигнала, когда последний стремится к нулю, т.е. производная в выбранной точке
S lim |
Y |
|
dY |
. |
(2.3) |
X |
|
||||
X 0 |
|
dX |
|
||
|
|
|
|
|
|
Применительно к измерительным приборам этот параметр называют чувствительностью и определяют как отношение изменения сигнала на выходе измерительного прибора к вызывающему его изменению измеряемой величины. Графически она определяется тангенсом
39

угла наклона касательной (см. рис. 2.9), проведенной к выбранной точке A статической характеристики.
Если статическая характеристика измерительного прибора нелинейная (кривая 1, см. рис. 2.9), то его чувствительность будет различной в разных точках характеристики, а шкала прибора – неравномерной. Приборы с линейной и пропорциональной статической характеристикой имеют постоянную чувствительность и равномерную шкалу.
У измерительных преобразователей статическая характеристика,
как правило, является линейной, |
|
Y KX . |
(2.4) |
Здесь K – коэффициент преобразования (или коэффициент пе-
редачи при использовании преобразователя в системах автоматического регулирования), определяемый как отношение сигнала на выходе измерительного преобразователя к сигналу на его входе.
Порог чувствительности или порог реагирования – наимень-
шее изменение входного сигнала, которое вызывает уверенно фиксируемое изменение выходного сигнала.
Как правило, наблюдатель, осуществляющий измерение, уверенно может заметить смещение стрелки на половину деления шкалы, поэтому порог чувствительности можно считать равным половине цены деления, а если учесть при этом соотношение (2.1), то в первом приближении порог чувствительности равен классу точности .
Одним из важнейших условий получения корректных результатов измерений является учет взаимодействия измерительных устройств между собой и с объектом измерений. Измерительное устройство потребляет некоторую энергию от объекта или от предыдущего по цепи измерения преобразователя. Поэтому необходимо учитывать свойство измерительных устройств обмениваться энергией через входные и выходные цепи. В качестве характеристики указанного свойства принято использовать для измерительных приборов понятие входного импеданса (полного или кажущегося сопротивления), а для измерительных преобразователей – понятия входного и выходного импеданса.
40