

книги / Диагностические модели и методы повышения контролепригодности элементов и устройств распределенных информационно-управляющих систем на основе комбинирования логик
..pdfтемы сбора, передачи и распределения информации РИУС проработаны достаточно подробно. В качестве подтверждения этого можно привести ссылки на монографии, статьи и доклады на научно-практических конференциях таких ученых, как А.А. Костин [72, 73], И.Г. Бакланов [6, 7], А.Б. Иванов [48], А.В. Засецкий [46], А.В. Иванов, С.Д. Постников, И.В. Соколов, В.В. Крухмалев [78], В.Н. Гордиенко [5]. Однако в них можно отметить ориентацию в большей степени на использование измерений и привязку к технологиям без активного использования методов
ипроцедур технической диагностики, что приводит к снижению достоверности
иусложнению алгоритмов принятия решения о техническом состоянии объектов диагностирования. Поэтому актуальной является проблема повышения разработки диагностических моделей, алгоритмов тестового диагностирования, методов обработки, дешифрации и принятия решения о техническом состоянии элементов
иустройств РИУС.
На каждом этапе решения задач диагностики значимыми факторами эффективности и результативности принимаемых технических решений являются выбор и применение адекватного математического аппарата. Методы построения и исследования элементов систем управления основываются на фундаментальных работах в области кибернетики отечественных и зарубежных исследователей, таких как С.Н. Васильев [105, 16], Д.А. Новиков [86, 87, 88], В.О. Никифоров [82, 84, 85], Ф.И. Ерешко [11, 44], L.A. Zadeh [45, 209], E.H. Mamdani [190]. Отметим,
что при синтезе и анализе элементов современных систем управления активно применяются нейронные сети, теория нечетких множеств и методы нечеткой ло-
гики, что отражено в работах R. Callan [51], S. Osowski [91], D. Rutkowska, M. Pilinsky, L. Rutkowsky [100], S. Haykin [157], В.И. Комашинского, Д.А. Смир-
нова [54], Л.Н. Ясницкого [169, 207], Ю.Н. Хижнякова [161, 162]. Однако в них практически не затронуты проблемы применения указанных подходов и соответствующего аппарата в задачах обработки диагностической информации и в принятии решения о техническом состоянии объекта в условиях неопределенности. Это подчеркивает актуальность исследований в данном направлении.
Для повышения достоверности передачи информации между элементами и устройствами РИУС, в немалой степени влияющей на достоверность суждения о техническом состоянии объектов контроля, были проведены исследования, опубликованы результаты и внедрены в современные технологические аппара- турно-программные решения научные достижения таких ученых, как W. Peterson, E. Weldon [197], R. Blahut [175], R. Hemming [183], Л.М. Финк [106], А.Г. Зюко,
В.В. Золотарев [47]. При этом практически не рассматривается применение математического аппарата нечетких множеств для повышения достоверности принятия решения в условиях неопределенности на фоне действия помех разной природы и характеристик. Реализованные в работе методы и алгоритмы мягкого декодирования сигналов и сообщений на основе комбинирования двоичной, много-
41
значной и нечеткой логики дают для определенных сочетаний реальных помех лучшие показатели достоверности, чем традиционные.
Математическая постановка задачи исследования. Введем формализо-
ванное описание задач исследования. Для оценки качественных и эксплуатационных показателей элементов и устройств РИУС в работе будут использованы следующие характеристики:
–показатели технического диагностирования D (контроля технического состояния) [33];
–показатели контролепригодности C [35];
–показатели достоверности передачи диагностической информации P [70]. Обобщенные эксплуатационно-технические показатели Q, которые характе-
ризуются комплексными показателями надежности [34], во многом определяются этими характеристиками, и их связь может быть в общем виде представлена так:
Q = { {Di}; {Cj}, {Pk} }, |
(1.1) |
где {Di} – продолжительность, достоверность, полнота диагностирования (контроля); глубина поиска места отказа (неисправности); условные вероятности необнаруженного или ложного отказа и т.д.; {Cj} – средняя трудоемкость диагностирования, коэффициент безразборного тестирования и и т.д.; {Pk} – вероятность ошибочного приема символа; вероятность неправильного приема (трансформации) сообщения и т.д.
Выражение (1.1) представляет собой вектор, координаты которого являются частными показателями, и их заданные значения требуется обеспечить (повысить, улучшить до нужного уровня). Указанные количественные показатели и их взаимосвязь раскрываются и оцениваются в соответствующих разделах работы.
Приведенные соображения предопределили следующую структуру работы. Глава 1. Анализ объекта исследования – элементов и устройств РИУС, функциональности и способов их реализации. Выбор и обоснование направления улучшения их эксплуатационно-технических характеристик за счет эффективного применения методов и алгоритмов технической диагностики, основанных на комбинировании логик, а также способов повышения надежности передачи управ-
ляющей и диагностической информации между элементами РИУС.
Глава 2. Разработка и исследование диагностических моделей элементов и устройств РИУС для контроля технического состояния и функционирования. Математическое описание и рекомендации по применению.
Глава 3. Создание и апробация подходов к контролепригодному проектированию элементов и структуры РИУС на этапах разработки, внедрения и диагностирования. Разработка рекомендаций по формированию контролепригодной структуры на уровне агента и менеджера системы управления и их применение.
Глава 4. Практическая реализация и внедрение результатов исследований в направлении диагностики, контроля, контролепригодного проектирования сетевых и управляющих элементов и устройств РИУС.
42
Вприложении приводятся примеры и иллюстрации к предложенным в работе моделям, методам, алгоритмам и средствам диагностирования элементов и устройств РИУС.
1.5.Выводы по главе
Вданной главе представлены следующие основные научные результаты:
1.Выполнен анализ проблем построения и реализации распределенных ин- формационно-управляющих систем технологических процессов и объектов. Введена основная терминология, выделены основные функциональные подсистемы, построены и проанализированы их обобщенные структурные модели.
2.Выполнена классификация систем управления распределенными объектами, что позволило сформулировать требования к их элементам и устройствам, а также проанализировать современные подходы к стандартизации процедур создания, реализации и внедрения элементов и устройств РИУС.
3.Проанализированы основные эксплуатационно-технические показатели элементов и устройств РИУС. Показано, что для обеспечения их заданных высоких значений эффективным инструментом является активное применение аппарата, методов и алгоритмов технической диагностики. Обоснован вывод, что для обеспечения заданных показателей надежности и достоверности заключения о фактическом состоянии объектов диагностирования необходимо обеспечение высокой достоверности передачи диагностической информации между элементами и устройствами РИУС.
4.Анализ публикаций ведущих отечественных и зарубежных ученых позволил оценить степень проработанности темы исследования, выявить проблемы, требующие теоретического и практического решения, сформулировать задачи исследования, обосновать структуру работы.
43
ГЛАВА 2. ФУНКЦИОНАЛЬНЫЕ ДИАГНОСТИЧЕСКИЕ МОДЕЛИ ЭЛЕМЕНТОВ И УСТРОЙСТВ РАСПРЕДЕЛЕННЫХ ИНФОРМАЦИОННО-УПРАВЛЯЮЩИХ СИСТЕМ НА ОСНОВЕ КОМБИНИРОВАНИЯ ЛОГИК
В данной главе решаются задачи построения диагностических моделей элементов и устройств РИУС. Рассмотрены и проанализированы особенности построения диагностических моделей, показана их адекватность объектам разной сложности и функциональности. Показано, что диагностическая модель описывает поведение исправного и неисправного объектов, поэтому от ее адекватности и параметров во многом зависит корректность реализации методов и процедур диагностирования.
Общее описание диагностических моделей объектов контроля приводится как в фундаментальных работах по технической диагностике [90, 95], так и в публикациях по более конкретным реализациям элементов и устройств систем управления [7, 17, 57]. Однако в них в основном используется структурноаналитическое описание объекта, что в большей степени подходит для проверки исправности (в основном на этапе производства). Поэтому актуальной является задача функционального представления объекта и построение на этой основе функциональной диагностической модели, которая более приспособлена для описания поведения объекта контроля на этапе эксплуатации (наиболее длительный этап жизненного цикла изделия).
Для решения задач диагностирования предложены две диагностические модели – контроля технического состояния и контроля функционирования (проверки правильности функционирования), показаны области их целесообразного применения. В рамках каждой модели предложено представление объекта диагностирования, а также математический аппарат для его описания на основе комбинирования логик, приведены иллюстрирующие примеры их использования в практически реализованных РИУС.
2.1. Анализ подходов к построению диагностических моделей устройств распределенных информационно-управляющих систем
Диагностическая модель предназначена для представления с требуемой точностью (мерой адекватности) объектов диагностирования (ОД) с целью последующего диагностирования состояния его элементов, а также корректной оценки правильности его функционирования [95]. Выделим 4 вида свойств для описания объекта диагностирования: логические параметры; электрические характеристики; временные параметры; показатели структуры (топологии) [90].
Логические параметры описывают функционирование ОД с использованием заданного алфавита – правила трансформации значений входных переменных в значения выходных переменных и переменных внутреннего состояния.
44
Электрические характеристики описывают, например, форму сигналов, допуски на отклонения их параметров, пороговые величины, способы соединения элементов и т.д.
Временные параметры описывают динамику поведения ОД – характеристики переходных процессов, задержки, частоту изменения параметров (джиттер, вандер) и т.п.
Структура (топология) формирует функциональное представление элементов, определяет характер их взаимодействия. Для описания ОД применяются аналитическая, структурная, структурно-аналитическая, поведенческая (автоматная) модели описания ОД.
При аналитическом описании топологии применяется система уравнений,
вкоторых определяется зависимость выходных переменных от значений входных
ивнутренних переменных.
При структурной форме описания топологии выполняется графическое изображение ОД в виде совокупности элементов и межсоединений.
Структурно-аналитическая модель описания ОД является сочетанием рассмотренных выше двух моделей, поскольку она использует и систему уравнений, и структуру ОД на элементном уровне.
Автоматная (поведенческая) модель предназначена для формального описания ОД с использованием таблиц переходов и выходов. Они заполняются значениями входных, выходных и внутренних переменных, которые вычисляются по определенным правилам преобразования.
Один из основных этапов построения диагностической модели ОД – выбор
иобоснование вида модели неисправностей, которые характерны для рассматриваемых объектов. Рассмотрим основные разновидности моделей неисправности: логические; логико-параметрические; логико-динамические [95].
Логическая модель учитывает только дефекты, приводящие к неправильному функционированию ОД, т.е. к нарушению логики выполнения функций. На уровне компонентов это может привести, например, к изменению логической функции, возникновению новых или удалению существующих связей между элементами, и т.п. Указанная модель адекватно и достоверно описывается аппаратом математической логики. Ее недостатком можно считать учет ограниченного спектра дефектов на фоне того, что усложнение ОД привело к расширению класса неисправностей (и логических, и параметрических) [17].
Логико-параметрическая модель вместе с логическими проявлениями дефектов учитывает и изменение количественных (в частности, электрических) характеристик элементов ОД. Данная модель является достаточно объемной за счет необходимости более полного и подробного описания не только логических, но
ипараметрических свойств и характеристик, но при этом покрывает более широкий спектр неисправностей.
45
Логико-динамическая модель описывает поведение неисправного ОД во времени за счет дополнительного учета временных характеристик – задержек, переходных процессов, джиттера и т.д. Это дополнительно усложняет описание ОД, так как логические дефектам дополняются неисправностями, которые описывают динамические свойства элементов и сигналов, но при этом расширяются возможности диагностирования.
Итак, можно сделать вывод, что диагностическая модель ОД характеризуется совокупностью параметров (логических, электрических, временных и т.д.), его компонентов и межсоединений, а также выбранной моделью неисправностей, которая максимально адекватна конкретному виду диагностируемого объекта.
Для задачи проверки исправности (работоспособности) логическая модель дефектов достаточно полно описывает объект диагностирования. Для описания может быть использована дискретная (двухуровневая – «исправен»/«не исправен» или многоуровневая шкала) или непрерывная шкала (например, коэффициент готовности элемента, коэффициент ошибок потока и т.п.).
Для задач проверки правильности функционирования наряду с логической может быть использована логико-параметрическая модель дефектов. В связи с изменением и усложнением технологической базы исследуемых многофункциональных объектов диагностирования, а также изменением природы дефектов для оценки выполнения функций предлагается ввести следующие, ранее не рассматриваемые в литературе, события и оценки:
невыполнение функции;
неполное (частичное) выполнение функции;
выход значений некоторых параметров функции за границы допустимых диапазонов;
ошибочное выполнение функции (выполнение другой функции, т.е. трансформация) и т.д.
При рассмотрении логико-динамической модели к событиям нарушения правильности или условий выполнения функций добавляются временные характеристики процедур ее выполнения, например, увеличение времени выполнения или задержка при выполнении функции выше допустимого значения. Для эффективного и адекватного решения каждой задачи диагностирования – проверка исправности (работоспособности) и правильности функционирования – необходимо разработать и исследовать собственную диагностическую модель. Они позволяют представить объект диагностирования наиболее адекватно решаемым задачам контроля. Построение и исследование диагностических моделей проводятся далее.
46
2.2. Построение и исследование диагностической модели для контроля технического состояния элементов и устройств распределенных информационно-управляющих систем
2.2.1. Представление объекта диагностирования
Для решения разных задач контроля технического состояния предлагается строить обобщенную или детализированную диагностические модели. Обобщен-
ная диагностическая модель контроля технического состояния позволяет получить агрегированную информацию об объекте и его элементах для получения информации об их техническом состоянии в целом. Для этого выделяются следующие варианты статуса объекта:
–исправное: объект доступен для контроля, нет сообщений о неисправностях его компонентов;
–авария: показывает несоответствие параметра заданным пороговым значениям (например, «коэффициент ошибок больше 10–3»), неисправность элемента («не отвечает микроконтроллер») и т.п.;
–состояние (несрочная авария): возможно возникновение аварии («увеличился ток накачки лазера») или сообщение («поднята трубка микротелефона»);
–нет связи: объект недоступен для контроля, нарушен интерфейс взаимодействия между объектом и менеджером системы управления.
Предлагается следующая иерархическая структура компонентов диагностической модели:
–модуль (элементарная структура, атомарный объект контроля: физическое устройство (процессор, контроллер, узел, порт и т.п.) или виртуальная структура (поток, канал, стык и т.п.));
–плата (совокупность модулей, но тоже может быть атомарным объектом контроля);
–блок (функциональное устройство, состоит из плат);
–узел (сосредоточенная структура, содержит несколько блоков);
–подсеть (распределенная структура, содержит несколько узлов)
–сеть (распределенная структура, содержит несколько подсетей). Указанным выше статусом может обладать объект каждого уровня иерархии.
Методы и алгоритмы определения статуса объектов будут предложены ниже.
Детализированная диагностическая модель контроля технического состоя-
ния позволяет определить причину возникновения того или иного статуса объекта по сообщениям о неисправностях, формируемым объектами нижележащего уровня иерархии. Такие сообщения обычно привязаны к атомарным объектам контроля (модулям (потокам, стыкам) или платам). Например, в технологии плезиохронной цифровой иерархии (PDH) для цифрового потока выделяют следующие виды сообщений о неисправностях: LOS – потеря сигнала; LOF – потеря цикловой син-
47

хронизации; LOM – потеря сверхцикловой синхронизации; AIS – сигнал индикации аварийного состояния; RDI – индикация аварии на удаленном конце (извещение) и т.п.
Каждое сообщение о неисправности может быть классифицировано как авария или состояние в зависимости от сущности, значимости, последствий и т.д.
В качестве иллюстрации к сообщениям о неисправности по плате можно указать следующие примеры: ошибка конфигурации; включение шлейфа; предавария лазера; работа от аккумуляторов; переход на резервный источник синхросигнала; вызов по служебной связи и т.п.
При анализе объектов более высокого уровня иерархии представляется, например в виде отчета, детализированная информация по составляющим их атомарным объектам контроля.
Каждый физический объект (плата или блок) описывается структурой, в которой отражается техническая информация о нем. По запросу от менеджера или по собственной инициативе объект формирует информацию о своем техническом статусе (будем использовать этот термин вместо термина «техническое состояние»), например, в таком формате:
Начало |
Адрес |
Поле |
Сообщение |
Сообщение |
… |
Сообщение |
Конец |
управления |
1 |
2 |
N |
Структура сообщения (на примере блока):
№ платы Тип платы Тип сообщения Код сообщения
Информация может быть использована:
–для индикации на самом блоке (например, в плате (статус компонентов платы или самой платы) или в специальной плате контроля и сигнализации (статус блока));
–для индикации в специальном устройстве (транспаранте);
–дляпередачи, обработкии представления в менеджере системы управления.
2.2.2. Формализованное описание и исследование диагностической модели контроля технического состояния
Для математического описания диагностической модели контроля технического состояния наиболее адекватно использовать двоичную логику. Это объясняется тем, что обрабатывается элементарное событие – наличие или отсутствие конкретного сообщения о неисправности или конкретного статуса блока. При этом в соответствии с принятой иерархией после установления статуса объектов i-го уровня начинается процесс обработки и принятия решения по статусу объектов (i+1)-го уровня.
48

Для определения и индикации технического статуса объектов на уровне физических элементов и устройств (модуль, плата и блок) выделяются следующие возможные варианты (размерность модели равна 3, что подчеркивает ее компактность, но при этом низкую иллюстративность):
–И: исправен – нет аварий и состояний (ни по одному компоненту нет сообщений об авариях или состояниях);
–А: авария (хотя бы у одного из их компонентов фиксируется хотя бы одна авария);
–С: состояние (хотя бы у одного из их компонентов фиксируется хотя бы одно состояние, но ни одной аварии нет).
Для обработки, отображения, хранения и представления информации в менеджере список технических состояний расширяется за счет того, что полученные, просмотренные и проанализированные оператором сообщения могут быть квитированы (отложены, учтены), чтобы на их фоне можно было определить новые сообщения (размерность модели равна 9):
–нет информации;
–нет ответа (Н);
–квитированный (отложенный) статус «нет ответа» (Н);
–нет аварий и состояний (И);
–состояние (есть новое или новые состояния) (С, fl_C);
–квитированный (отложенный) статус «состояние» (все состояния просмот-
рены и квитированы) (С, fl_OC);
–авария (есть новое или новые аварии) (А, fl_A);
–квитированный (отложенный) статус «авария» (все аварии просмотрены и
квитированы) (А, fl_OA);
– новое состояние на фоне отложенных аварий (OAC).
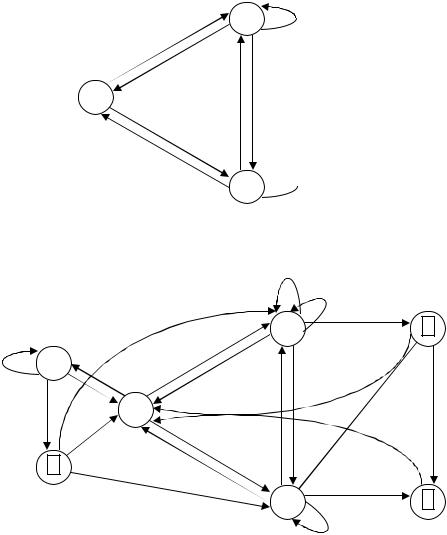
Переходы между разными вариантами технического статуса в диагностике принято описывать при помощи графов [63, 104]. Например, построим граф переходов для анализа работы платы контроля и сигнализации одного блока, которая на своих средствах визуальной индикации показывает его статус (рис2.1).
Для процесса обработки информации в менеджере системы управления граф переходов усложняется за счет расширения списка возможных состояний, связанных с квитированием информации, отсутствием связи с объектом и т.п. Пример фрагмента такого графа приведен на рис. 2.2.
На основании анализа графов переходов для процессов определения технического статуса объектов всех уровней иерархии разработаны и реализованы алгоритмы принятия решения в соответствующих функциях программного обеспечения менеджера системы управления. Были построены и реализованы алгоритмы определения статуса платы, блока, узла, подсети и всей сети в целом. Для этого был использован расширенный список технических статусов (с учетом квитирования). Приведем для иллюстрации алгоритм определения статуса платы (рис.2.3).
49
А 
А С
А
А
ИА А
С
С
С  С
С
Рис. 2.1. Граф переходов процесса определения статуса блока
( – появление аварии или состояния; – устранение аварии или состояния)
|
|
А |
|
А |
С |
А |
|
|
|
|
А |
|
|
А |
|
|
|
|
|
|
|
||
Н |
Н |
|
А |
|
|
|
|
Н |
А |
|
А |
А |
|
||
|
|
А |
|
||||
Н |
|
Н |
|
|
|
|
А |
|
|
И |
|
|
|
|
|
|
|
Н |
С |
|
А |
С |
|
|
Н |
|
|
|
|
|
|
|
С |
С |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
С |
|
С |
С |
|
|
|
|
|
|
|
|
|
|
|
|
С |
|
|
|
Рис. 2.2. Граф переходов процесса определения статуса блока ( – появление аварии или состояния; – устранение аварии или состояния; – квитирование аварии или состояния)
Для реализации алгоритма была построена таблица формирования условий (табл. 2.1) в зависимости от статуса флагов (fl) появления того или иного сообщения. Условнееобозначения: «1» – истина(true); «0» – ложь(false); «–» – неимеетзначения.
|
|
|
|
|
|
|
Таблица 2.1 |
|
|
Таблица формирования условий |
|
|
|||
|
|
|
|
|
|
|
|
№ |
|
|
Значения флагов статуса |
|
Статус |
||
fl_А |
|
fl_ОА |
fl_С |
|
fl_ОС |
устройства |
|
|
|
|
|||||
1 |
0 |
|
0 |
0 |
|
0 |
И |
2 |
1 |
|
– |
– |
|
– |
А |
3 |
0 |
|
1 |
0 |
|
– |
ОА |
4 |
0 |
|
1 |
1 |
|
– |
ОАС |
5 |
0 |
|
0 |
1 |
|
– |
С |
6 |
0 |
|
0 |
0 |
|
1 |
ОС |
50