

книги / Автоматизированное управление формированием сенсомоторных навыков у операторов технологических установок с применением компьютерных тренажеров
..pdf2.2. Математическая модель системы автоматизированного управления формированием сенсомоторных навыков у операторов
Предложена математическая модель системы автоматизированного управления формированием сенсомоторных навыков у операторов технологических установок в ходе профессиональной подготовкисприменениемКТК(посредствомвыполненияупражнений).
В процессе обучения оператора на КТК, заключающемся в прохождении комплекса упражнений, каждое из которых предназначено для формирования сенсомоторного навыка выполнения технологической операции, решается задача оптимизации [92–95]: за минимальное время обучения необходимо, чтобы выполнение операции было закреплено до автоматизма на заданном
|
|
Nупр. |
|
уровне качества: Tобуч. = Tg → min, при этом: |
|||
|
|
g =1 |
|
|
|
|
Ngвып. |
g = |
1, Nупр. |
, Tg = fвып. (Ugреш. ,Ugрек. ) = Tgv – время Tg мно- |
|
|
|
|
v=1 |
гократного выполнения |
g -го упражнения зависит от множества |
||
принятий решений Ugреш. |
по завершении каждого v -го выполне- |
||
ния и множества советующих воздействий (рекомендаций) Ugрек. обучаемому в процессе каждого v -го выполнения (Tgv – время v -го выполнения g -го упражнения);
|
|
|
Kgh ≥ Kghпор. |
|
|
|
g = 1, Nупр. , |
– качество выполнения технологи- |
|||||
ческой операции, |
моделируемой в g -м упражнении, определяе- |
|||||
|
|
|
|
|
||
мое параметрами |
Kgh (где |
h = 1, Nпар. ), должно соответствовать |
||||
нормативам, т.е. пороговым значениям Kghпор. ; |
||||||
|
|
|
Ng ≥ Ngнав. |
|
||
g = 1, Nупр. , |
– упражнение выполнено заданное |
|||||
число раз Ngнав. подряд на требуемом уровне качества (т.е. действие закреплено до автоматизма).
51

Совокупность зависимостей между параметрами математической модели представлена схематично на рис. 2.2.
Рис. 2.2. Схема подсистемы управления формированием сенсомоторных навыков
При построении модели главным образом учитывалась специфика перегрузочных процессов как характерного примера технологических процессов, для осуществления которых от операторов требуется владение сенсомоторными навыками.
Далее представлено теоретико-множественное описание процесса функционирования каждого из блоков (см. рис. 2.2), отвечающих за различные составляющие процесса управления и учитывающих специфику сенсомоторных навыков, особенности их формирования, исследованные в главе 1.
2.2.1.Модель предметной области (блок 1)
илогико-динамические модели технологического процесса (блок 2)
Взаимосвязь операций, выполняемых на некоторой технологической установке в процессе работы, можно представить ориентированным графом (моделью предметной области (блок 1),
52
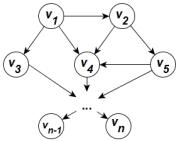
см. рис. 2.2) Gупр. =< MТО, Mвз. > , где MТО – множество технологических операций (вершин графа vg MТО ), выполнение каждой
из которых требует сформированности определенного навыка; Mвз. – множество дуг графа, показывающих взаимосвязь между
операциями. Каждая дуга < vg −1,vg > Mвз. обозначает, что навык выполнения операции vg основан на навыке выполнения опера-
ции vg −1 (рис. 2.3).
Рис. 2.3. Пример взаимосвязи операций
Каждая операция vg MТО сопоставлена с упражнением на КТК, поэтому граф Gупр. определяет очередность выполнения упражнений. Конкретный маршрут графа Gупр. , используемый при
прохождении упражнений на КТК, определяется стадией и задачами обучения.
Набор выполняемых взаимосвязанных упражнений, определяемый графом Gупр. , обеспечивает отработку оператором типо-
вых действий по управлению технологической установкой, в том числе нештатных и аварийных ситуаций.
В блоке 2 задается множество логико-динамических моделей технологического процесса в форме сетей Петри. Для выполне-
ния операций vg MТО используется множество рычагов Mрыч.
53
(Fрыч. : MТО → Mрыч. ). При выполнения операции оказываются воздействия Vрыч. = {rl (tq ) | q = 1, Nвозд.} на рычаги, где rl (tq ) – по-
ложение, в которое оператор должен перевести рычаг Rl Mрыч. |
в |
||
момент времени tq . Здесь rl (tq ) Rl′ , где Rl′ = {rk | k = |
|
} |
– |
1, Nпол. |
|||
множество возможных положений l -го рычага. |
|
||
Для vg MТО взаимосвязь между множеством возможных |
|||
воздействий Vрыч. оператора и множеством состояний технологи-
ческой среды по результатам воздействий можно представить сетью Петри < Mсост. , Mвозд. , Fвх. , Fвых. ,m0 > (рис. 2.4), где Mсост. – множество состояний среды (позиции сети), Mвозд. . – множество
воздействий (переходы сети), Fвх. – входная функция переходов, определяемая как Mсост. × Mвозд. → {0;1} , Fвых. – выходная функция переходов, определяемая как Mвозд. × Mсост. → {0;1} , m0 – вектор начальной маркировки сети.
Рис. 2.4. Пример взаимосвязи воздействий на рычаги и состояний среды (сеть Петри)
Планируемая (расчетная) траектория Bпл. выполнения операции представляется последовательностью переходов < t1пл. ,...,tnпл. >
54
сети Петри. В примере (см. рис. 2.4) траекторией Bпл. является
< t1,t5 ,t11 > .
Реальные траектории выполнения операции могут отличаться от расчетной. Например, такими траекториями в рассматриваемом примере (см. рис. 2.4) могут являться: < t1,t5 ,t10 ,t12 > ,
< t2 ,t6 ,t8 ,t11 > , < t1,t4 ,t5 ,t11 > и т.д. В зависимости от степени отклонения реальной от расчетной траектории системой будут формироваться советующие воздействия будущему оператору, что обеспечивает индивидуализацию процесса обучения.
2.2.2. Оценка, накопление и обработка оценок ситуаций (блоки 3.1 и 3.2)
В блоке 3.1 при выполнении упражнения фиксируются наиболее значимые для технологического процесса ситуации, каждая из которых представляет тройку
Yсит. (tz ) =< Sсит. (tz ), Sсит′ . (tz−1 ),Vсит. > ,
где Sсит. (tz ) = fсит. (Sсит′ . (tz−1 ),Vсит. ) – состояние моделируемой производственной среды в момент времени tz , зависящее от преды-
дущего состояния Sсит′ . (tz−1 ) , достигнутого в момент времени tz−1 ,
иот воздействия Vсит. обучаемого.
Вблоке 3.2 осуществляется сбор первичных данных о про-
цессе формирования сенсомоторного навыка (Mсит. – множество наиболее значимых ситуаций Yсит. (tz ) Mсит. из всех зафиксиро-
ванных), и на основе обработки этих данных вычисляются значения показателей качества, измеряемых в ходе упражнения и со-
ставляющих множество Xкачисп.. Xкач. , где Xкач. – множество всех показателей качества, сопоставленных с упражнением.
Показатели качества характеризуют результаты и правильность выполнения моторных действий. Примеры показателей:
55
время выполнения операции; точность результата выполнения; число аварийных ситуаций; точность выполнения последовательности действий по сравнению с расчетной траекторией Bпл. и т.д.
При этом | X |
кач. |
|= N |
кач. |
и | X исп. |= N′ |
= N′ |
+ N′ |
, где N′ |
– |
|
|
|
кач. |
кач. |
трм. |
дин. |
трм. |
|
||
число терминальных показателей, значения которых вычисляются однократно по завершении упражнения или его части, а Nдин′ . –
число динамических показателей, значения которых измеряются многократно в ходе упражнения в требуемые моменты времени.
В блоке 3.2 формируются: |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
P |
= {Pтрм. | r = |
1, N′ |
} |
|
|
– |
множество |
|
значений терминаль- |
||||||||||||||||
трм. |
|
r |
|
|
|
|
|
трм. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ных показателей; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
= {Pдин. (t |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
P |
j |
) | s = |
1, N′ |
|
|
|
, j = 1, N дин.} |
– |
множество значений |
||||||||||||||||
дин. |
|
s |
|
|
|
|
|
дин. |
|
|
s |
|
|
|
|
|
|
|
|
|
|
||||
динамических показателей в моменты времени t j |
( Nsдин. – число |
||||||||||||||||||||||||
измерений по s -му показателю). |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
Здесь |
Pтрм. |
|
и Pдин. |
(t |
j |
) |
рассчитываются согласно зависи- |
||||||||||||||||||
|
|
r |
|
|
|
|
s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
мостям Pтрм. = f |
трм. |
(M |
сит. |
, B |
|
) |
|
и |
Pдин. (t |
j |
) = f |
дин. |
(M |
сит. |
, B |
) . |
|||||||||
|
r |
|
|
|
пл. |
|
|
|
|
s |
|
|
|
|
пл. |
|
|||||||||
2.2.3. Оценка уровня сформированности навыка (блок 3.3)
В блоке 3.3 оценивается каждый этап формирования сенсомоторного навыка, успешность завершения которого определяется тем, выполнил ли оператор упражнение заданное число раз на требуемом уровне качества, т.е. рассчитывается степень закрепления выполнения операции до автоматизма. Каждый новый этап отличается от предыдущего добавлением новых оцениваемых показателей качества.
Параметры модели (коэффициенты овладения), определяющие качество выполнения технологической операции как степень соответствия нормативам, представляют величины на
56

отрезке [0; 1], получаемые обработкой данных о вычисленных в блоке 3.2 показателях качества:
|
M |
|
= {K |
|
|
|
|
|
} |
и |
M |
|
= {K дин. (t |
|
) | s = |
|
, |
||
|
трм. |
трм. | r = 1, N |
′ |
|
дин. |
j |
1, N′ |
||||||||||||
|
|
|
r |
трм. |
|
|
|
s |
|
|
дин. |
|
|||||||
j = 1, Nsдин.} |
– множества |
коэффициентов овладения по терми- |
|||||||||||||||||
нальным и динамическим показателям соответственно; |
|
|
|||||||||||||||||
|
M |
агр. |
= {K агр. | s = |
1, N′ |
|
} – множество агрегированных коэф- |
|||||||||||||
|
|
|
s |
|
|
дин. |
|
|
|
|
|
|
|
|
|
|
|
||
фициентов |
овладения |
по |
|
динамическим показателям, |
где |
||||||||||||||
Nsдин.
Ksагр. = Nsдин. ∏ Ksдин. (t j ) . j=1
Процесс расчета значений из M трм. и Mдин. рассмотрен в па-
раграфе 2.5.
Качество выполнения технологической операции в целом характеризуется интегральным показателем – комплексным коэффициентом овладения [96–98]:
|
|
|
|
N ′ |
|
|
N ′ |
|
|
|
|
|
|
|
трм. |
|
дин. |
|
|
|
|
|
|
|
Kовл. = |
Wrтрм.Krтрм. + Wsдин.Ksагр. |
||||||
|
|
|
r =1 |
|
s=1 |
|
|
, |
||
|
|
|
|
N ′ |
|
N ′ |
|
|
||
|
|
|
|
|
трм. |
дин. |
|
|
|
|
|
|
|
|
|
Wrтрм. + Wsдин. |
|
|
|||
|
|
|
|
|
r =1 |
s=1 |
|
|
|
|
где W |
трм. M |
вес. |
и W дин. |
M |
вес. |
, причем M |
вес. |
– множество весов |
||
r |
|
s |
|
|
|
|
|
|||
показателей качества, вычисленное в блоке 4 (настройки процесса обучения) с использованием метода анализа иерархий
(МАИ) [99, 100].
Для вычисления Kовл. используется приведенная выше фор-
мула, поскольку суммируются однородные величины, заданные шкалами отношений [96].
Следует отметить, что в блоке 4 задаются значения параметров (устанавливаются с применением графического пользовательского интерфейса или запрограммированы) для работы других блоков в соответствии с требованиями нормативных доку-
57
ментов (ГОСТы, инструкции и т.п.) о выполнении технологического процесса, а также с привлечением экспертов.
|
Соответствие качеству отражает индикатор |
Iовл. |
успешного |
||||||||||||||||||||
(Iовл. = 1) либо неуспешного (Iовл. = 0) выполнения упражнения: |
|
||||||||||||||||||||||
|
I |
|
= 1 |
|
|
|
|
|
|
|
|
|
|
|
|
агр. ≥ 0) |
|||||||
|
овл. |
, |
если |
( r = |
1, N′ |
|
, |
трм. |
≥ 0) ( s = |
1, N′ |
, |
||||||||||||
|
|
|
|
|
|
|
|
|
трм. |
|
|
r |
|
|
|
|
дин. |
|
s |
|
|||
( |
овл. ≥ 0) ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
I |
овл. |
= 0 , |
если |
( r = |
1, N′ |
|
|
, |
трм. |
< 0) ( s = |
1, N′ |
|
, |
агр. < 0) |
||||||||
|
|
|
|
|
|
|
|
|
трм. |
|
r |
|
|
|
|
дин. |
|
s |
|
||||
( |
овл. < 0) . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Здесь |
овл. |
= K |
|
− Kпор., |
трм. = Kтрм. − Kтрм. |
, |
|
|
агр. = Kагр. − Kагр. |
, |
||||||||||||
|
|
|
|
овл. |
овл. |
r |
|
|
r |
пор. r |
|
|
|
s |
s |
пор. s |
|
||||||
где Kовлпор.. , Kпортрм..r , Kпорагр.. s – пороговые значения коэффициентов ов-
ладения, заданные в блоке 4.
Поскольку сформированный навык означает закрепление до автоматизма выполнения технологической операции на заданном уровне качества, в блоке 3.3 также вычисляется параметр
нав. = Nусп. − Nнав. , где Nусп. – число успешных (Iовл. = 1) выполнений упражнения последовательно и подряд с заданным набором показателей, Nнав. – минимальное число таких выполнений, при котором навыксчитается сформированным, заданное в блоке4.
2.2.4.Принятие решений и обработка данных
орезультатах обучения (блок 3.4)
Вблоке 3.4 осуществляется формирование управляющих воздействий (принятие решений) vреш. = fреш. (Iовл. , нав. ) по завер-
шении каждого и перед первым выполнением упражнения для определения:
–завершенности процесса формирования сенсомоторного навыка в целом или отдельного этапа формирования;
–подмножеств советующих воздействий и оцениваемых показателей качества технологического процесса при последующем выполнении упражнения с учетом достигнутого уровня навыка.
58

Разработана методика принятия решений, способствующая информационной поддержке обучаемого в процессе формирования сенсомоторных навыков при выполнении упражнений на КТК и отличающаяся применением оригинальных алгоритмов.
Для представления логико-временных особенностей генерации управлений vреш. при многократном повторении обучаемым упраж-
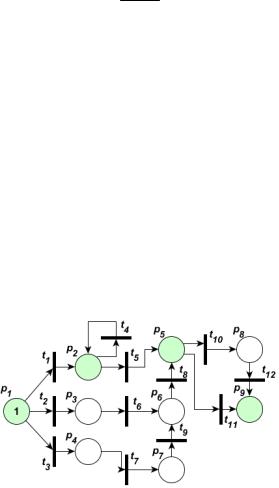
нения с целью формирования сенсомоторного навыка построена имитационная модель в форме Сети Петри[101–103] (рис. 2.5).
Рис. 2.5. Сеть Петри
Применение сети Петри позволяет формализовано описать алгоритм принятия решений (представленных позициями сети) с целью организации наиболее эффективной информационной поддержки обучаемого в зависимости от текущего уровня сформированности навыка (определяемого условиями в переходах сети).
Позиции p1 соответствует формирование начального подмножества показателей качества, оцениваемых при выполнении упражнения, p2 – выполнение обучаемым упражнения. Позиция p3 обозначает принятие решения о повторном выполнении упражнения без модификации подмножества показателей и об установке множества рекомендаций, p4 – о повторном выполнении без модификации подмножества показателей и без установки рекомендаций, p5 – о повторном выполнении с модификацией
59
подмножества показателей, p6 – о переходе к следующему уп-
ражнению (согласно блоку 1).
Выбор очередного упражнения на основе модели предметной области (блок 1) осуществляется автоматически, что представлено зависимостью:
uвбр. = f (uвбр′ . ,Gупр. ,vреш. ),
где uвбр′ . MТО – предыдущее выполненное обучаемым упражне-
ние; |
uвбр. MТО |
|
– |
очередное выбранное упражнение, причем |
||
< u′ |
,u |
> M |
вз. |
; |
v |
– результат принятия решения о необхо- |
вбр. |
вбр. |
|
|
реш. |
|
|
димости повторного выполнения упражнения либо о переходе к новому упражнению.
Переход t1 обозначает, что обучаемый приступил к первому выполнению упражнения, переходы t3 , t5 , t7 – к повторному выполнению. Переход к следующему упражнению обозначен как t9 . Переход t2 обозначает, что выполнение упражнения окончено с
условием Iовл. = 0 , |
t4 |
– условием (Iовл. = 1) ( нав. < 0) , |
t6 – усло- |
||||
вием (Iовл. = 1) ( |
нав. |
= 0) (Iкач. = 1) , t8 – условием |
(Iовл. = 1) |
||||
( |
нав. = 0) (Iкач. = 0) , где |
Iкач. |
– |
индикатор наличия ( Iкач. = 1) |
|||
или |
отсутствия ( Iкач. |
= 0 ) |
еще |
не |
использованных показателей |
||
качества при последовательных выполнениях упражнения. Подмножество оцениваемых показателей качества определяет-
ся на основе приоритетов показателей, вычисляемых многокритериальным анализом[99, 100], что описано детально впараграфе2.3.
Множество рекомендаций Mрек. для повторного выполнения
упражнения определяется как |
Mрек. = Mрековл.. Mрекэкс.. Mректрм.. Mрекдин.. , |
||||||||||||||||||||||
причем: |
M |
овл. = f |
овл. (K |
овл. |
, Kпор. ) ; M экс. = f экс. (K |
|
,K |
экс. ) , где K |
экс. |
= |
|||||||||||||
|
|
|
|
рек. |
|
рек. |
овл. |
|
рек. рек. |
|
овл. |
овл. |
овл. |
|
|||||||||
= f |
|
|
|
, N |
|
|
|
M трм. |
|
|
|
|
|
|
M трм. |
= f трм. ( |
|||||||
экс. |
(γ |
нав. |
вып. |
); |
= {M |
трм. |
| r = |
1, N′ |
}, |
где |
|||||||||||||
|
|
|
|
|
рек. |
|
|
рек. r |
|
трм. |
|
|
|
|
рек. r |
|
рек. |
|
|||||
Kтрм.,Kтрм. ); |
|
|
|
= f дин. (Kагр.,Kагр. |
|
|
|||||||||||||||||
Mдин. |
={Mдин. | s = |
1,N′ |
}, где M дин. |
). |
|
||||||||||||||||||
r |
|
пор. r |
|
|
|
рек. |
рек. s |
|
|
дин. |
|
рек. s |
|
|
рек. |
s |
пор. s |
|
|
||||
60