

книги / Прочность и устойчивость статически неопределимых рам
..pdfАналогично определим коэффициенты второго канонического уравнения, для чего из рамы вырежем узел 2 и рассмотрим условие его равновесия (рис. 2.5). Из рис. 2.5 следует:
r21 = r12 = 0,625EJ;
r |
= 8EJ |
+ 4EJ + 6EJ = 3,417EJ; |
||
22 |
6,4 |
|
4,8 |
4,5 |
|
|
|||
|
r |
= |
6EJ |
= 0, 260EJ. |
|
(4,8)2 |
|||
|
23 |
|
|
|
Рис. 2.5
Коэффициенты третьего уравнения, представляющие реакции во введенном стержне (третьей связи) от единичных перемещений Z1, Z2 , Z3 , найдем из суммы проекций на горизонтальную
ось всех сил, действующих на основную систему (см. рис. 2.3). Или рассечем стойки и рассмотрим равновесие ригеля (рис. 2.6). При этом под условием равновесия будем понимать равенство нулю проекций всех сил, действующих на выделенную часть рамы, на горизонталь.
Рис. 2.6
41

Из рис. 2.4 или рис. 2.6 найдем:
|
|
r |
= |
6EJ |
|
; |
||
|
|
(3,5)2 |
||||||
|
|
31 |
|
|
|
|||
|
|
r |
|
= |
6EJ |
|
|
; |
|
|
|
(4,8)2 |
|
||||
|
|
32 |
|
|
|
|||
r |
= |
12EJ |
+ 12EJ |
= 0,388EJ. |
||||
33 |
|
(3,5)3 |
|
(4,8)3 |
|
|
|
|
По теореме о взаимности реакций r31 = r13 , r32 = r23. Единичные реакции можно также определить по формулам
|
∫ |
EJ |
|
r = |
|
Mi Mk |
ds, |
|
|
||
ik |
|
|
|
где Mi и Mk – эпюры от единичных перемещений, построен-
ные в основной системе метода перемещений.
Проверку найденных коэффициентов проводим способом перемножения эпюр. Для этого суммарную единичную эпюру
MΣΣ (см. рис. 2.2) перемножим саму на себя:
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
1 1 |
|
6EJ |
|
|
|
|
2 |
|
6EJ |
|
|
||||||||||||||
|
rΣΣ = ∑∫ |
|
M |
|
|
ds = |
|
|
|
|
|
|
|
+ |
|
||||||||||||||||||||||||||||
|
|
|
ΣΣ |
|
|
|
|
|
|
|
|
|
4,5 |
|
|
|
|
4,5 |
|
||||||||||||||||||||||||
|
|
EJ |
2EJ |
2 |
|
4,5 |
3 |
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
1 |
|
|
|
1 |
|
6EJ |
|
|
|
|
2 |
|
|
6EJ |
|
6,4 |
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
4,5 |
|
|
|
|
|
+ |
|
|
|
|
|
|
|
× |
|
|
|
|
|
||||||
|
|
|
|
2EJ |
|
|
|
4,5 |
3 |
4,5 |
|
12EJ |
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
12EJ |
|
2 |
|
|
|
|
12EJ |
2 |
|
|
|
12EJ |
2 |
|
|
12EJ |
|
2 |
|
||||||||||||||||||||||
× 2 |
|
|
|
|
|
|
|
|
− |
|
|
|
+ |
||||||||||||||||||||||||||||||
|
6,4 |
|
|
|
|
+2 |
6,4 |
|
|
|
|
6,4 |
|
|
− |
6,4 |
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3,5 |
|
|
|
|
20EJ |
2 |
|
|
|
13EJ |
|
2 |
|
20EJ 13EJ |
|
|
|
|
||||||||||||||||||||||||
+ |
|
|
|
2 |
|
|
|
|
|
|
|
2 |
|
|
+ |
2 |
|
|
|
|
|
2 |
− |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
+ |
||||||
|
|
(3,5) |
|
(3,5) |
|
(3,5) |
2 |
(3,5) |
2 |
|
|||||||||||||||||||||||||||||||||
|
6EJ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
42

|
4,8 |
|
|
25, 2EJ 2 |
|
15,6EJ 2 |
25, 2EJ 15,6EJ |
|
|
|
||||||||
+ |
|
|
2 |
(4,8) |
2 |
|
+2 |
(4,8) |
2 |
|
− |
(4,8) |
2 |
(4,8) |
2 |
2 |
|
= |
|
||||||||||||||||||
|
6EJ |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
=1,333EJ +1,333EJ +3,750EJ +2, 402EJ +1, 463EJ =10, 281EJ.
При этом должно выполняться равенство ∑rik = rΣΣ. Сум-
ма всех коэффициентов при неизвестных ∑rik = r11 +r22 +r33 +
+ 2 (r12 +r13 +r23 ) =10,281EJ.
Равенство соблюдается.
Определим свободные члены R1F , R2F , R3F . Для определения реактивных моментов от внешней нагрузки R1F и R2F вырежем узлы 1 и 2 эпюры M F и рассматриваем их равновесие
(рис. 2.7).
Рис. 2.7
Для определения реакции в дополнительном опорном стержне вырежем ригель. В местах разрезов прикладываем поперечные силы. Для данного примера поперечные силы в стойках равны нулю:
R1F +17,067 −33,75 = 0 → R1F =33,75 −17,067 =16,683;
R2F +20, 25 −17,067 = 0 → R2F =17,067 −20, 25 = −3,183;
R3F = 0.
Положительные направления реакций rij и RiF всегда сов-
падают с направлением соответствующего перемещения Zi.
5. Решим систему канонических уравнений, подставим найденные значения коэффициентов в систему (2.3):
43

3,726EJZ1 +0,625EJZ2 +0, 49EJZ3 +16,683 = 0; |
|
||||||||
0,635EJZ1 +3, 417EJZ2 +0, 26EJZ3 −3,183 = 0; |
(2.4) |
||||||||
0, 490EJZ +0, 260EJZ |
2 |
+0,388EJZ |
3 |
= 0. |
|
||||
|
1 |
|
|
|
|
|
|
||
Решив (2.4), найдем углы поворота точек 1 и 2 – Z1 и Z2 |
|||||||||
и линейное смещение точки 3 – Z3: |
|
|
|
|
|||||
Z |
= −5,511; Z |
2 |
= − |
1,4857 ; Z |
3 |
= −5,964 . |
|
||
1 |
EJ |
|
|
EJ |
|
EJ |
|
||
|
|
|
|
|
|
|
|||
Подставим найденные значения Z1, Z2 и Z3 в систему (2.4)
иубедимся, что они найдены верно.
6.Построим эпюру изгибающих моментов (рис. 2.8) по формуле
M = M F + M1Z1 +M2Z2 + M3Z3.
Рис. 2.8
Для проверки правильности расчета вырезаем узлы 1 и 2 и ригель (рис. 2.9) и составляем для них условие равновесия.
Рис. 2.9
44
∑M1 =0: −26, 402 +23,026 +3,376 = 0;
∑M2 = 0: 18, 27 −15, 47 −2,8 = 0;
∑ X =0: 1,02 −1,02 = 0.
Условия равновесия выполняются.
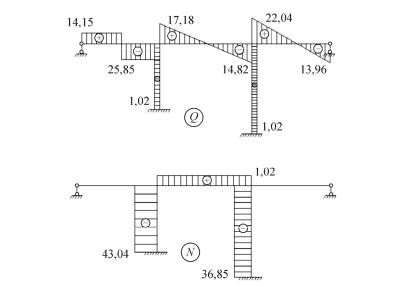
7. Эпюры поперечных и продольных сил (рис. 2.10) строятся как в методе сил (см. п. 7 подразд. 1.2).
Рис. 2.10
2.3. Расчет статически неопределимых систем на подвижную нагрузку
При расчете статически неопределимых систем на подвижную нагрузку используются линии влияния внутренних усилий. Линии влияния внутренних усилий (изгибающих моментов, поперечных и продольных сил) по методу перемещений строятся
45
на основании общей формулы, выражающей принцип суперпозиции:
n
л.в. S = л.в. Sосн + ∑Si (л.в. Zi ),
i=1
где л.в. Sосн – линия влияния фактора S в основной системе метода перемещений (т.е. линия влияния рассматриваемой внутренней силы в основной системе в зависимости от положения движущейся нагрузки F = 1);
Si – значение фактора S в основной системе от Zi = 1; л.в. Zi – линии влияния основных неизвестных метода пе-
ремещений (узлов поворота и поступательных смещений узлов). Таким образом, задача распадается на две части: первая –
получение л.в. Sосн и вторая – построение линий влияния перемещений Zi .
Для построения л.в. Sосн используются данные табл. 2.1, так как основная система метода перемещений состоит из отдельных стержней, закрепленных по концам. Для стержней пе-
ременного сечения л.в. Sосн получается в результате решения отдельной задачи для данного стержня, например, методом сил.
Во многих случаях л.в. Sосн носят местный характер: при выходе силы F = 1 за пределы рассматриваемого стержня в составе
основной системы ординаты л.в. Sосн будут равны нулю. Различают статический и кинематический методы построе-
ния линий влияния Zi .
Для получения линий влияния перемещений Zi статическим методом значения Zi , отвечающие каждому фиксирован-
ному положению силы F = 1, находятся из решения системы уравнений
46
r11Z1 +r12Z2 +... +r1nZn +r1F = 0;
r21Z1 +r22Z2 +... +r2nZn +r2F = 0;
.................................................. rn1Z1 +rn2Z2 +... +rnnZn +rnF =0,
где r1F , r2F , ..., rnF – реакция от подвижной нагрузки F = 1, величина которых зависит от координаты положения единичного
груза ХF. |
|
Для |
стержней постоянного сечения при вычислении |
riF ( X F ) |
пользуются данными табл. 2.1. Решая систему для на- |
меченных значений координаты X F , получим соответствующие ординаты линии влияния всех Zi .
Кинематический метод основан на теореме о взаимности перемещений. Пусть, например, нас интересует значение угла поворота заделки Zi при положении силы F = 1 в точке X F .
Представим два состояния системы:
1) по направлению Zi приложен момент Mi =1 (и никаких других внешних сил);
2) в точке X F приложена сила F = 1. По теореме о взаим-
ности работ Mi(1)Zi(2) = F (2)δ(1)Fi . Так как Mi = 1 и Fi = 1, то имеем равенство
Zi = δFi .
Таким образом, для получения линии влияния некоторого i-го перемещения Zi надо по его направлению приложить соот-
ветствующее единичное силовое воздействие (внешнюю обобщенную силу). Тогда перемещения точек сооружения, измеренные по направлению подвижной силы F = 1, окажутся численно равными соответствующим значениям Zi и, следовательно, эпюра указанных перемещений представит:
47
л.в.Zi = эп.δFi .
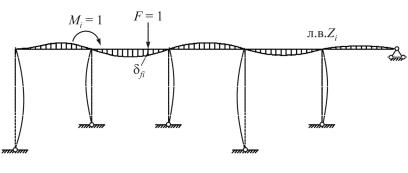
Итак, на рис. 2.11 линия влияния прогибов ригеля от воздействия момента Mi представляет линию влияния угла поворота Zi при вертикальной подвижной силе F = 1. При этом
прогибы, совпадающие с направлением силы F = 1, дают положительные ординаты линии влияния.
Рис. 2.11
Эпюра |
перемещений δFi |
|
от Mi =1 очевидно |
совпадает |
с эпюрой δ*Fi |
от поворота защемления на угол Zi =1, |
деленной |
||
на rii: |
|
|
|
|
|
δFi |
= |
δ*Fi . |
|
|
|
|
rii |
|
Кинематический метод позволяет без вычислений легко представить ожидаемую форму линии влияния данного перемещения.
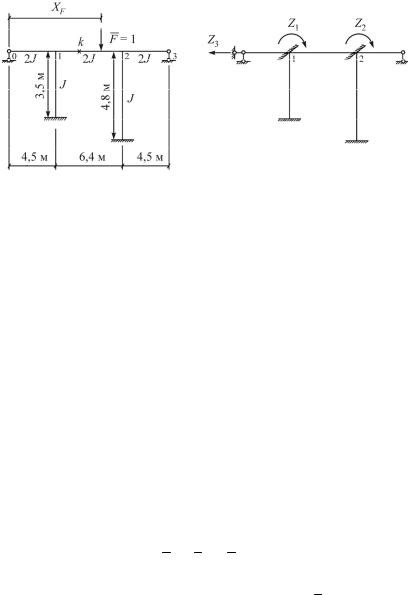
Пример. Для рамы, показанной на рис. 2.12, а, построить линии влияния изгибающего момента и поперечной силы для сечения k, расположенного во втором пролете, в предположении, что единичный вертикальный груз перемещается по всей длине ригеля.
48
а |
б |
Рис. 2.12
Решение.
1. Определим степень кинематической неопределимости как сумму неизвестных углов поворота nу и неизвестных линейных перемещений узлов nл:
n = nу + nл = 2 +1 = 3.
2. Образуем основную систему. Введя связи, препятствующие возможным угловым и линейному смещениям, обозначим предполагаемые направления трех неизвестных перемещений Z1, Z2 и Z3 (рис. 2.12, б). Система канонических уравнений будет иметь вид
r11Z1 + r12Z2 + r13Z3 + r1F = 0; r21Z1 + r22Z2 + r23Z3 + r2F = 0; r31Z1 + r32Z2 + r33Z3 + r2F = 0.
3. Построим для основной системы (см. рис. 2.12, б) эпюры изгибающих моментов M1, M2 , M3 от единичных перемещений введенных связей по заданным направлениям, используя данные табл. 2.1 и суммарную единичную эпюру MΣΣ (рис. 2.13).
49
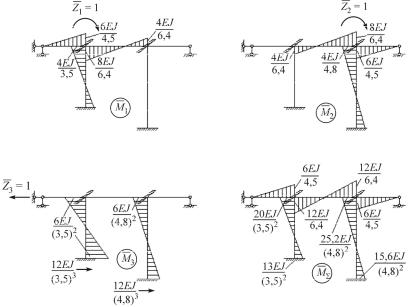
Рис. 2.13
4. Вычислим коэффициенты rij, применив статический способ. Для определения коэффициентов первого канонического уравнения, представляющих собой реактивные моменты в защемлении (первой связи), вырежем узел 1 и рассмотрим его равновесие при действии на основную систему Z1 = 1, Z2 = 1,
Z3 = 1 (см. рис. 2.13). На рис. 2.14 показан узел 1 с действую-
щими на него моментами со стороны отброшенных частей рамы и реактивными моментами в защемлении.
Условия равновесия узла дают:
r = 6EJ |
+ |
|
4EJ |
|
+ 8EJ = 3,726EJ; |
|
|
|
|||||
11 |
4,5 |
3,5 |
6,4 |
|||
|
||||||
|
r |
= |
4EJ |
= 0,625EJ; |
||
|
|
|||||
|
12 |
6,4 |
|
|
||
|
|
|
|
|||
50