

книги / Скреперы
..pdfб) напряжения от действия усилия N:
σ N= ± N .
F
Результаты расчетов представляем в виде таблицы. Напряжения от изгиба рассчитываются при r = rн и r = rв .
Запас прочности по рассматриваемому сечению
n = 3500 = 1,37, 2549
где 3500 кгс/см2 — предел текучести для стали 15ХСНД.
7. РАСЧЕТ НА ПРОЧНОСТЬ ГИДРОЦИЛИНДРА ПОДЪЕМА И ОПУСКАНИЯ КОВША
Принимаем диаметр поршня D = 120 мм, минимальный диаметр трубы D1 = 137 мм, диаметр штока d = 55 мм.
Материал трубы гидроцилиндра — сталь 45, σ т= 3600 кгс/см2.
Установим максимальное усилие в гидроцилиндре при вывешивании колес полуприцепа (расчетное положение) на уровне
Pг = 25104 кгс.
Реактивное давление в штоковой полости:
P = Pг , Fш
где Fш — площадь сечения штоковой полости, Fш = π4 (D2 − d 2 ) ;
F = 3,14 (122 − 5,52 ) = 89, 29 (см2 ),
ш |
4 |
|
|
|
|
|
|
тогда |
|
|
|
|
P = |
25104 |
= 281 (кгс/см2 ). |
|
|
||
|
89,29 |
|
|
41
Напряжение растяжения цилиндра
σ z= Pг ,
Fт
где Fт — площадь трубы цилиндра, Fт = π4 (D12 − D2 );
Fт = 3,144 (13,72 −122 ) = 34,3 (см2 ),
тогда
σ z= 25104= 732 (кгс/см2 ). 34,3
Напряжение на внутренней поверхности трубы вдоль радиуса определяем по формуле Ляме:
|
|
2 |
− P2 |
2 |
2 |
2 |
|
1 |
|
|
σ |
|
= |
P1 r1 |
r2 − |
(P1 − P2 )r1 |
r2 |
|
, |
||
r |
r22 − r12 |
r22 − r12 |
|
r2 |
||||||
|
|
|
|
|
|
|||||
гдеР1 иР2 — внутреннееинаружноедавление, действующеенацилиндр; r1 и r2 — внутренний и наружный радиусы цилиндра;
r — текущий радиус цилиндра. Если r = r1, то при P2 = 0
σ |
|
= |
Pr r12 |
|
− |
Pr r22 |
= |
|
|
1 |
(P r2− P r2 )= |
||||||
|
|
|
|
|
r2 |
− r2 |
|||||||||||
|
r |
|
r2 |
− r2 |
|
|
r2 |
− r2 |
|
r |
1 |
r |
2 |
||||
|
|
2 |
1 |
|
|
2 |
|
1 |
|
2 |
1 |
|
|
|
|
||
|
|
|
|
= |
|
|
Pr |
|
(r2 |
− r2 )(−1) = −P . |
|
|
|||||
|
|
|
|
|
r2 |
− r2 |
|
|
|||||||||
|
|
|
|
|
|
2 |
1 |
|
|
r |
|
|
|||||
|
|
|
|
|
2 |
|
1 |
|
|
|
|
|
|
|
|
|
|
Напряжения на внутренней поверхности трубы по касательной к окружности определяем по формуле Ляме:
|
|
2 |
− P2 |
2 |
|
2 |
2 |
|
1 |
|
|
σ |
|
= |
P1 r1 |
r2 |
+ |
(P1 − P2 )r1 |
r2 |
|
, |
||
t |
r22 − r12 |
|
r22 − r12 |
|
r2 |
||||||
|
|
|
|
|
|
|
|||||
Тогда при r = r1 и P2 = 0 имеем
σ |
|
= |
P1 r12 |
+ |
P1 r22 |
= |
P |
R12 + R22 |
= |
P |
R12 + R22 |
= |
||||
|
|
|
|
− R2 |
|
− R2 |
||||||||||
|
t |
|
r2 |
− r2 |
|
r2 |
− r2 |
|
1 R2 |
|
r R2 |
|
||||
|
|
2 |
1 |
2 |
1 |
|
|
2 |
1 |
|
|
2 |
1 |
|
||
=281 6,852 + 62 = 2133 (кгc/см2 ). 6,852 − 62
42
Приведенное нормальное напряжение по энергетической теории прочности:
|
|
σ = σ + σ + σ − σ σ − σ σ − σ σ |
|
|
|
, |
||||||
|
|
|
2 |
2 |
2 |
|
|
|
|
|
|
|
|
|
пр |
1 |
2 |
3 |
1 |
2 |
1 |
3 |
2 |
3 |
|
где σ 1= σ |
=t |
2133 кгc/см2 ; |
|
|
|
|
|
|
|
|
|
|
σ 2= σ |
=z |
732 кгc/см2 ; |
|
|
|
|
|
|
|
|
|
|
σ 3= σ |
=r |
− 281 кгc/см2 . |
|
|
|
|
|
|
|
|
||
Тогда |
|
|
|
|
|
|
|
|
|
|
|
|
σ пр= |
|
21332+ 7322+ 2812− 2133 732+ 2133 281+ 732 281= |
||||||||||
|
|
|
|
= 2100 (кгc/см2 ). |
|
|
|
|
|
|||
Запас прочности
nt = 3600 = 1,71. 2100
8. РАСЧЕТ НА ПРОЧНОСТЬ ЭЛЕМЕНТОВ СЕДЕЛЬНО-СЦЕПНОГО УСТРОЙСТВА СКРЕПЕРА
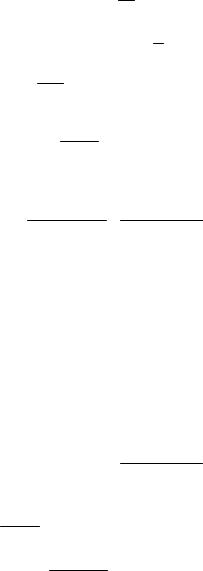
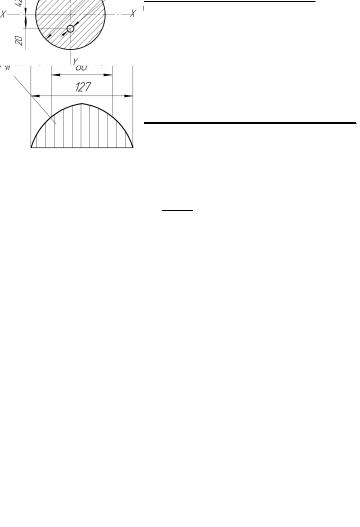
Материал — сталь 45, σ т= 3600 кгс/см2 . Расчетная схема пальца опоры Е дана на рис. 20. Сечение пальца показано на рис. 21.
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 20. Расчетная схема пальца |
Рис. 21. Сечение пальца |
||
седельно-сцепного устройства |
|
||
43

Это сечение соответствует координате наибольшего изгибающего момента (см. рис. 20). При значении момента Mи = 50130 кгс·см игеометрическихпараметрахсечения(см. рис. 21) напряжениеизгибаσи = = Mи/ Wox = 50130 / 93,76 = 535 (кгс/см2), гдеWox — моментсопротивления сеченияотносительнооси, проходящейчерезцентртяжестисечения[9].
Запас прочности по пределу текучести:
h = |
σ т |
= |
3600 |
= 6,7. |
|
|
|||
т |
σ и |
535 |
|
|
|
|
|||
Напряжение среза
τ = RE ,
2F
где RE — максимальная сила, действующая на палец; F — площадь сечения.
Если RE =18740 кгс, то
τ= 18740 = 119 (кгс/см2 ). 2 78,5
Напряжение смятия
σ см= |
|
RE |
, |
|||
1, 25 |
|
R lT |
||||
|
|
|||||
где R — радиус пальца; lт — длина проушины.
σ = |
18740 |
= 375 (кгс/см2 ). |
|||
|
|||||
см |
1,25 |
5 |
8 |
||
|
|||||
9. РАСЧЕТ НА ПРОЧНОСТЬ ПАЛЬЦА ДЛЯ КРЕПЛЕНИЯ ТЯГОВОЙ РАМЫ
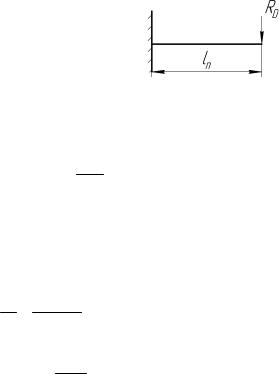
Расчетная схема пальца дана на рис. 22. Материал пальца — сталь 40Х, предел текучести материала σт = 3300 кгс/см2.
Максимальная сила, действующая на палец,
RD = RDx2 + RDz2 .
44
Для примера рассмотрим состав- |
|
|
ляющие усилий в шарнире, равные со- |
|
|
ответственно 10876 и 6359 кгс, тогда |
|
|
RD = 12 599 кгс. |
|
|
Изгибающий момент в сечении, |
Рис. 22. Расчетная схема пальца |
|
соответствующем заделке, M и = RD lп . |
||
для крепления тяговой рамы |
Если lп = 85 мм, то M и = 12 599 8,5 = 10709,5 (кгс см)
Момент сопротивления сечения (круг)
W = π D3 , 32
где D — диаметр пальца. При D = 85 мм имеем
W = |
3,14 8,53 |
= 60, 26 (см3 ). |
|
||
32 |
|
|
Напряжение изгиба в рассматриваемом сечении
σ п= M = 10709,5= 1777 (кгс/см2 ). W 60,26
Запас прочности
hт = 3300 = 1,86. 1777
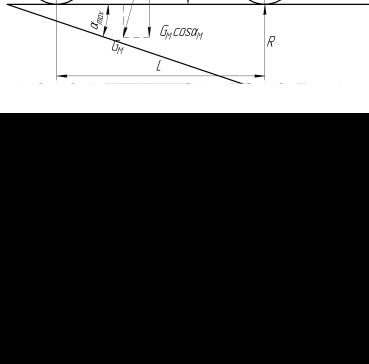
10. УСТОЙЧИВОСТЬ ЗЕМЛЕРОЙНО-ТРАНСПОРТНЫХ МАШИН
Землеройно-транспортные машины необходимо проверять на устойчивость при работе, так как они часто преодолевают значительные продольные и поперечные уклоны. Машины могут опрокидываться при перемещении и работе на больших уклонах, а шарнирносочлененные машины — при повороте на горизонтальной площадке.
При больших продольных уклонах машина может остановиться вследствие ее опрокидывания или из-за недостаточного сцепления ее ведущих колес с грунтом ввиду перераспределения нагрузок между осями машины при движении на подъем.
45
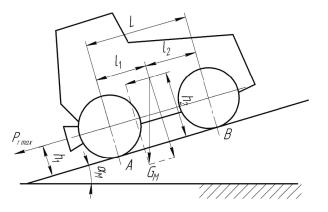
Опрокидываются нередко при работе короткобазовые машины, в частности бульдозеры на базе колесных двухосных тягачей. В этом случае кроме массы машины Gм должно быть учтено и максимальное тяговое усилие Pт max, приложенное к крюку (рис. 23).
Рис. 23. Схема к определению продольной устойчивости машины
Расчеты на устойчивость целесообразно вести путем установления максимального угла наклона α мmax , при котором машина может
опрокинуться. Уравнение моментов сил относительно точки А можно составить в виде
где
где
P |
h + G h sin α |
= |
G |
l cosα |
мmax |
, |
(14) |
||
тmax |
1 |
м |
2 |
мmax |
м |
1 |
|
|
|
α мmax — максимальный угол наклона местности. Отсюда
Pтmax h1 = Gм(l1 cos α мmax− h2 sinα мmax ).
Максимальное тяговое усилие машины по сцеплению
G ϕ |
сц |
cos α |
≥ |
P + |
G sinα |
мmax |
, |
м |
|
мmax |
тmax |
м |
|
ϕ сц — коэффициент сцепления. Отсюда
Pтmax = Gм(ϕ сц cos α мmax− sinα мmax ). |
(15) |
46
Решив совместно уравнения (14) и (15), получим
tgα = l1 − h1 ϕ сц . |
||
м |
h2 |
− h1 |
|
||
Возможность преодоления подъемов зависит от условий сцепления ведущих колес машины с поверхностью грунта. С увеличением угла αм (рис. 24) сцепление колес ухудшается из-за уменьшения действующей на них нагрузки.
Рис. 24. Схема к определению максимального угла наклона по условию сцепления
Максимальное тяговое усилие, которое может быть достигнуто при движении машины на подъем, характеризуется углом φсц при условии сохранения сцепления ведущих колес с грунтом. Это усилие можно определить по формуле
Pтmax = R ϕ сц,
где R — реакция грунта на ведущие колеса. Значение R определяем из уравнения
тельно точки В:
G |
(l1 |
cos α мmax− |
h sinα |
||
R = |
м |
|
|||
|
|||||
|
L |
|
|
|
|
моментов сил относи-
мmax ).
47
Тогда
Pтmax |
= |
Gм ϕ сц |
|
(l1 cos α |
мmax− |
h sinα |
мmax ). |
(16) |
|
||||||||
|
L |
|
|
|
|
|
|
|
Вместе стемтяговоеусилие, необходимое для движениямашины:
Pтmax = Gм f cos α мmax+ Gм sinα мmax . |
(17) |
Решение уравнений (16) и (17) даст возможность определить максимальный угол подъема:
tgα = |
l1 ϕ сц − L f |
, |
|
L + ϕ сц h |
|||
м |
|
||
|
|
где f — коэффициент сопротивления перемещению машины;
h — высота центра тяжести тягача.
При больших углах подъема для самоходной машины типа скрепер будет невозможно реализовать максимальное тяговое усилие.
Поперечную устойчивость машины при движении по косогору следует проверять при одновременном ее повороте (рис. 25). Развиваемая в этом случае сила инерции будет способствовать опрокидыванию машины. Силу инерции можно найти из выражения
|
|
|
Pj |
= |
Gм υ тр |
, |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
g rп |
|
|
|
|
|||||
где rп — радиус поворота. |
|
|
|
|
|
|
|
|
|
|
|
|
|||
Из уравнения моментов сил относительно точки А находим |
|
||||||||||||||
P |
h + G (h sin α |
|
|
)− |
|
B0 |
cosα |
= |
0, |
|
|||||
мmax |
|
|
|||||||||||||
j |
|
|
м |
|
|
мmax |
|
|
|||||||
|
|
|
|
|
|
|
2 |
|
|
|
|
||||
или |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
υ 2 |
+ g(h sin α |
|
|
)− |
|
B0 |
|
cosα |
= |
0. |
(18) |
||
|
|
rп |
|
|
2 |
||||||||||
|
|
|
мmax |
|
|
мmax |
|
|
|||||||
Из уравнения (18) можно определить предельное значение угла α мmax , при котором устойчивость машины не нарушится.
Шарнирно-сочлененные машины, а также машины, смонтированные на базе одноосных тягачей, могут потерять устойчивость при повороте на горизонтальной площадке. Наиболее опасен случай по-
48
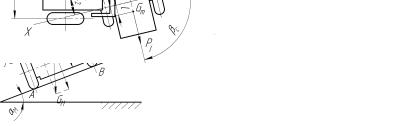
ворота порожней машины, когда одновременно производится ее торможение. Потерять устойчивость она может при нахождении оси колес тягача на одной прямой, проходящей через точку контакта заднего колеса с грунтом (линия опрокидывания Х—X, рис. 26).
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 25. Схема к определению боковой |
Рис. 26. Схема к определению поперечной |
||
|
устойчивости машины |
устойчивости шарнирно-сочлененной |
|
|
|
|
машины при повороте |
Из уравнения моментов сил, действующих на машину относительно X—X, находим выражение
Pj h + Gм l = Gп l2 ,
Тогда условие устойчивости будет иметь вид
Gм |
j h |
+ l |
≥ Gп l2 , |
|
|||
g |
|
|
|
где Pj — сила инерции, развивающаяся при торможении тягача.
Отрицательное ускорение при торможении j = 3...5 м/с2 ; h —
высота расположения центра тяжести тягача.
Из сопоставления геометрических размеров можно получить
l |
|
= |
|
B0 |
sinβ |
|
− l cosβ |
|
, |
2 |
|
|
c |
c |
|||||
|
|
|
|
2 |
|
|
|
|
|
где β c — угол складывания.
Тогда условие устойчивости машины при движении по косогору будет иметь вид
G |
|
j h |
+ l |
|
≤ |
G |
|
B0 |
sinβ |
|
− l cosβ |
. |
|
|
|
|
|
c |
|||||||
м |
g |
|
п |
2 |
|
1 |
c |
|||||
|
|
|
|
|
|
|
|
|
|
|||
49
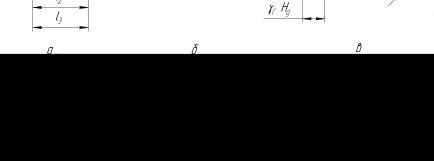
11. ОПРЕДЕЛЕНИЕ УСИЛИЙ В МЕХАНИЗМЕ ПОДЪЕМА ЗАСЛОНКИ И РАЗГРУЗКИ КОВША СКРЕПЕРА
Наибольшее усилие открывания заслонки Рзас возникает при разгрузке ковша с «шапкой» в начальный момент ее открывания. Схема сил, действующих на заслонку, показана на рис.27. Из уравнения моментов сил относительно точки О находим:
∑M 0 |
= 0; Pзас = |
Gзас l3 |
+ Gгр |
l2 |
, |
l |
l |
||||
|
1 |
|
1 |
|
|
где Gзас — масса заслонки, кг;
Gгр — масса грунта в ней (условно заштриховано), кг.
Рис. 27. К расчету разгрузочного устройства скрепера: а, б — схемы сил, действующих на заслонку и заднюю стенку соответственно; в — эпюра давлений
Масса грунта в заслонке зависит от ширины заслонки Взас, ее высоты Нзас, длины l3 и формы. Определить ее точно сложно. Для приближенных расчетов принимаем:
|
Gгр = kзас Взас Hзас Lзас γ г g, |
где |
kзас — коэффициент, учитывающий конфигурацию заслонки, |
kзас |
= 0,8; |
|
γ г — объемный вес грунта в заслонке; |
50