

книги / Маркшейдерское дело. Анализ точности
.pdfвенного выполнения ориентировки невозможно правильно и безопасно вести горные работы. В соответствии с этим маркшейдер должен уметь оценить точность ранее проведенной ориентировки, выполнить предрасчет погрешности проектируемой соединительной съемки и на основании этого предрасчета разработать методику ориентировки нового горизонта.
Под погрешностью ориентировки Mор понимается погрешность определения дирекционного угла m 0 первой стороны ОМС. Эту погрешность можно определить по формуле
Mор Mп2 2 Mш2 , |
(3.18) |
где Mп – погрешность примыкания к отвесам на поверхности; – погрешность проектирования створа отвесов с поверхности на ориентируемый горизонт; Mш – погрешность примыкания к отвесам на
ориентируемом горизонте (в шахте).
При ориентировании через один вертикальный ствол примыкание к отвесам может быть осуществлено различными способами, главными из которых являются:
–способ соединительного треугольника;
–способсимметричногопримыкания(способпараллельныхшкал);
–способ соединительного четырехугольника;
–примыкание при помощи пентапризмы.
3.5.1.Оценка точности ориентировки первой стороны подземного теодолитного хода при примыкании
к отвесам способом соединительного треугольника
Согласно опросу, проведенному профессором Н.И. Стениным [11] в более чем 150 маркшейдерских отделах, было выявлено, что на горнодобывающих предприятиях используют исключительно способ соединительного треугольника.
Определим последовательно все три составляющие погрешности ориентировки при примыкании к отвесам способом соединительного треугольника (в курсовом проекте это ствол № 1).
21
Определение погрешности примыкания к отвесам на по-
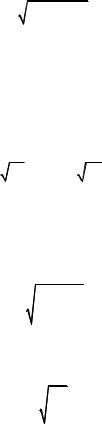
верхности. Примыкание на поверхности (рис. 3.6) заключается в передаче дирекционного угла на створ отвесов АВ при помощи примычного угла DCB и угла β при отвесе В. В шахте дирекционный угол со створа отвесов АВ передается на исходную сторону подземной съемки при помощи угла при отвесе А и примычного угла AC D (при этом передача координат с поверхности в шахту не принимается во внимание). Все вычисления, как правило, ведутся с использованием острых углов, так как в треугольнике ошибка острого угла меньше ошибки тупого.
Рис. 3.6. Схема ориентировки при примыкании к отвесам способом соединительного треугольника
Погрешность примыкания на поверхности определяется по формуле
Mп M DCB2 |
M 2 |
, |
. |
(3.19) |
|
|
|
|
Вычисления производятся в метрах. В формуле (3.19) из углов
и выбирается наименьший.
Всвою очередь, если ошибки центрирования сигнала в точке D
итеодолита в точке С (ed и ec соответственно) равны между собой
(ed eс e) , то ошибка примычного угла |
M DCB |
|||||||||
формуле |
|
|
|
|
|
|
|
|
|
|
M |
|
|
m2 |
|
|
e |
|
2 |
, |
|
DCB |
|
|
||||||||
|
|
i |
|
|
|
|||||
|
|
|
|
|
d |
|
|
|
||
вычисляется по
(3.20)
где mi – инструментальная ошибка (определяется по формуле (3.14)
или (3.15)); е – линейная ошибка центрирования теодолита в точке С и сигнала в точке D (линейная ошибка центрирования в точке В
22
равна нулю, поскольку при измерении угла DCB визируем непосредственно на проволоку отвеса В); d – длина примычной стороны на поверхности (DC).
Ошибку вычисленного угла M при отвесе A и вычисленного угла M при отвесе B можно найти по формулам из работы [5]:
M
M
2 |
|
|
m |
|
2 |
|
m |
|
2 |
2 |
|
|
|
a2 M 2 |
|
|
||||||
|
a |
|
c |
|
|
|
|
|
|
|
|
|
|
|
||||||||
tg |
|
|
|
|
|
|
|
|
M |
|
|
|
|
|
|
|
|
, |
(3.21) |
|||
a |
|
c |
|
c |
2 |
cos |
2 |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
m |
|
2 |
|
m |
|
2 |
2 |
|
|
|
b2 M |
2 |
|
|
|
|
|||
|
b |
|
c |
|
|
|
|
|
|
|
|
|
|
|
||||||||
tg |
|
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
|
|
|
|
, |
(3.22) |
|
|
b |
|
|
c |
|
c |
2 |
cos |
2 |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где M – ошибка измерения угла соединительного треугольника
АВС; ma , mb , mc – ошибки измерения сторон a, b, c соединительно-
го треугольника АCB, определяются по формуле (3.10).
Ошибка измерения угла возникает за счет инструментальной ошибки mi и ошибки центрирования теодолита в точке С:
|
2 |
|
e2 2 |
a |
2 |
|
2 |
2ab cos . |
|
M |
mi |
|
|
|
b |
|
(3.23) |
||
2a2b2 |
|
|
Определение ошибки проектирования створа отвесов.
На точность проектирования влияют следующие факторы: действие воздушного потока, капеж, схождение отвесов к центру земли, упругость проволоки и др. Вследствие этого створ отвесов на ориентируемом горизонте может составить со створом отвесов на дневной поверхности некоторый угол , который вычисляется по формуле
|
|
e2 |
e2 |
, |
(3.24) |
c |
1 |
2 |
|||
|
|
2 |
|
|
где e1 и e2 – линейные ошибки проектирования первого и второго отвесов; c – расстояние между отвесами.
23
При e1 е2 е
|
|
е. |
(3.25) |
|
c |
|
|
Линейная ошибка проектирования точки не может быть определена непосредственно. Возможно лишь примерное определение этой ошибки из сопоставления результатов геометрического и гироскопического ориентирования подземной съемки. Согласно практике эта линейная ошибка не превышает 1,5–2,0 мм [14].
Определение погрешности примыкания в шахте. Погреш-
ность примыкания в шахте определяется по формулам, аналогич-
ным формулам (3.19)–(3.23):
M |
ш |
M 2 |
|
M 2 |
|
; |
(3.26) |
||||||
|
|
|
|
AC D |
|
|
, |
|
|
|
|||
M |
|
|
|
|
m2 |
|
|
e |
|
2 |
; |
(3.27) |
|
AC D |
|
|
|
||||||||||
|
|
i |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
M |
2 |
|
m |
||
tg |
|
a |
|||
|
|
|
|
|
a |
|
|
|
|
|
|
M |
2 |
m |
|||
tg |
|
|
b |
||
|
|
|
|
|
b |
|
|
|
|
|
|
2 mcc
2 mcc
2 |
2 |
|
|
a 2 M 2 |
|
|
|||||
|
M |
|
|
|
|
|
|
|
|
; |
|
c |
2 |
cos |
2 |
|
|
||||||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
2 |
|
|
b 2 M 2 |
|
|
|
||||
|
M |
|
|
|
|
|
|
|
|
; |
|
|
c |
2 |
cos |
2 |
|
||||||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
e2 2 |
a |
2 |
b |
2 |
2a b cos . |
M |
mi |
|
|
|
|
|||
2a 2b 2 |
|
|
(3.28)
(3.29)
(3.30)
Ориентировка выполняется независимо дважды [13, п. 163],
и определяется средняя ошибка ориентировки M2ор . Полученную
ошибку нужно сравнить с допустимой по инструкции и сделать вывод о качестве ориентирно-соединительной горизонтальной съемки способом соединительного треугольника.
24
3.5.2. Определение ошибки ориентировки ствола при примыкании к отвесам с помощью параллельных шкал
(симметричный способ)
Способ симметричных шкал можно применять при примыкании к отвесам только в шахте. Поэтому на поверхности примыкание к отвесам осуществляется соединительным треугольником и ошибка примыкания на поверхности вычисляется по формулам (3.19)– (3.23). Если примыкание в шахте производится при помощи параллельных шкал (в курсовом проекте это ствол № 2), то ошибка ориентировки вычисляется по формуле
Mор |
Mп2 Mш2 , |
(3.31) |
где Mп – ошибка примыкания к отвесам на поверхности способом соединительного треугольника; Mш – погрешность примыкания к отвесам наориентируемомгоризонте способомсимметричныхшкал.
В этом случае Mш включает в себя погрешность проектирова-
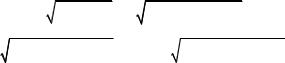
ния створа отвесов, поскольку задачи проектирования и примыкания здесь решаются одновременно. Схема примыкания симметричным способом показана на рис. 3.7.
Рис. 3.7. Схема примыкания симметричным способом
25

Примыкание симметричным способом заключается в передаче дирекционного угла створа отвесов АВ на примычную сторону P1P2 в шахте через угол . В данном случае ошибка примыкания в шахте Мш равна ошибке определения этого угла М . В свою очередь, ошибка угла зависит от ошибок шкальных отсчетов ( ra и rb ), ошибок измерения расстояний от отвесов до шкал ( l1 и l2 ), ошибки
измерения расстояния между шкалами (с) и ошибки измерения расстояний от примычных точек (Р1 и Р2) до шкал (a и b) и определяется по формуле
М |
ш |
M |
|
M 2 |
M 2 |
M 2 |
M 2 |
M 2 |
M 2 |
M 2 |
. (3.32) |
|
|
ra |
rb |
l1 |
l2 |
c |
a |
b |
|
Влияние ошибок шкальных отсчетов определяется по формулам:
M |
|
|
|
1 |
l1 |
m |
, |
|||
ra |
|
|
||||||||
|
|
|
|
|
|
a |
|
ra |
|
|
|
|
|
|
x |
|
|
(3.33) |
|||
|
|
|
|
|
1 |
l2 |
m |
|||
M |
|
|
|
, |
||||||
rb |
|
|
||||||||
|
|
|
|
|
|
|
|
rb |
|
|
|
|
|
|
x |
b |
|
|
|||
где mra и mrb – ошибки шкальных отсчетов, mra mrb 0,0005 ;
x c l1 l2 .
Влияние ошибок измерения расстояний от отвесов до шкал оп-
ределяется по формулам: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
M |
l1 |
|
|
|
|
|
|
|
ra |
|
|
y m |
, |
||||
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l1 |
|
|||
|
|
|
|
|
|
|
x a |
|
|
x |
|
(3.34) |
||||||||
|
|
|
|
|
|
|
|
|
|
|
rb |
|
|
y m |
||||||
|
|
|
M |
l2 |
|
|
|
|
|
, |
||||||||||
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l2 |
|
||||
|
|
|
|
|
|
|
|
x b |
|
|
x |
|
|
|||||||
где y r 1 |
l1 |
r |
1 |
l2 |
; m |
, |
|
m |
– |
ошибки измерения рас- |
||||||||||
a |
|
b |
|
|
|
|
|
l1 |
|
|
|
l2 |
|
|
|
|||||
|
a |
|
|
|
|
b |
|
|
|
|
|
|
|
|
|
|
|
|
||
стояний от отвесов до шкал, рассчитываются по формуле (3.10). Влияние ошибки измерения расстояния между шкалами опре-
деляется по формуле
26

M |
|
|
y |
m , |
(3.35) |
|
x 2 |
||||
|
с |
|
с |
|
где mс – ошибка измерения расстояния между шкалами, рассчиты-
вается по формуле (3.10).
Влияние ошибок измерения расстояний от примычных точек до шкал определяется по формулам:
M |
a |
|
ral1 |
|
a2 x |
||||
|
|
m ,M |
|
|
rbl2 |
m , |
(3.36) |
|
b2 x |
||||
a |
b |
|
b |
|
где ma , mb – ошибки измерения расстояний от примычных точек
до шкал.
Ориентировка выполняется независимо дважды [13, п. 163],
и определяется средняя ошибка ориентировки M2ор . Полученную
ошибку нужно сравнить с допустимой по инструкции и сделать вывод о качестве ориентирно-соединительной горизонтальной съемки симметричным способом.
Примечание: маркшейдерская практика применения способа примыкания с помощью параллельных шкал показывает, что в основном ошибку этого способа определяет ошибка шкальных отсчетов ra и rb . Поэтому оценивать точность симметричного примыка-
ния можно по упрощенной формуле:
|
|
2 |
|
|
l1 |
|
|
||
|
|
1 |
a |
|
|
||||
M |
ш |
|
|
|
|
|
m . |
(3.37) |
|
|
|
|
|
|
|||||
|
|
|
x |
|
|
r |
|
||
|
|
|
|
|
|
|
|
||
где mr – ошибка шкальных отсчетов, mr |
mr |
mr 0,0005. |
|||||||
|
|
|
|
|
|
a |
|
b |
|
3.5.3. Оценка точности гироскопического ориентирования
Гироскопическое ориентирование производят специальными приборами – гирокомпасами. Данный метод позволяет с высокой точностью определить азимут направлений.
27

В данном разделе необходимо произвести оценку точности гироскопического ориентирования, пользуясь теоретическими основами, представленными ниже. При этом требуется выбрать гирокомпас, описать требования к гироскопическому ориентированию и методику выполнения работ при гироскопическом ориентировании.
Под точностью гироскопического ориентирования понимается средняя квадратическая погрешность определения дирекционного угла ориентируемой стороны относительно исходной стороны на поверхности. Она зависит от точности гирокомпаса и выбранной методики ориентировки.
Под точностью гирокомпаса понимается средняя квадратическая погрешность m определения гироскопического азимута при одном пуске прибора. Данная величина определяется по формуле
m |
2 |
|
n 1 , |
(3.38) |
где n – количество взятых отсчетов при определении гироскопического азимута; – уклонение отдельного значения гироскопического азимута от среднего арифметического [6].
Величина m является паспортной характеристикой прибора. При его выпуске с завода погрешность устанавливается экспериментально путем многократных пусков гирокомпаса на одной и той же стороне в разных условиях. Значение ошибки m позволяет достаточно просто оценивать точность определения дирекционного угла при любой методике ориентирования.
Дирекционный угол ориентируемой стороны в шахте определяется из выражения [6]
ш п Гп Гш , |
(3.39) |
где п – известный дирекционный угол стороны на поверхности; Гп и Гш – гироскопический азимут соответственно стороны на поверхности и стороны в шахте; – разность сближения меридианов
для точек стояния гирокомпаса на поверхности и в шахте,п ш .
28
Поэтому ошибка определения дирекционного угла гироскопическим способом определяется так:
m |
m2 |
m2 |
, |
(3.40) |
|
Гп |
Гш |
|
|
где mГп и mГш – погрешности гироскопических азимутов соответст-
венно исходной (на поверхности) и ориентируемой (в шахте) сторон. Каждый из этих азимутов в общем случае определяется как среднее арифметическое результатов нескольких пусков прибора.
Погрешности средних значений вычисляются по формулам:
m |
|
m |
, m |
m |
, |
(3.41) |
|
|
|||||
Гп |
|
kп |
Гш |
kш |
|
|
|
|
|
|
|
где kп и kш – количество взятых отсчетов при определении гироскопического азимута исходной и ориентируемой сторон.
Подставляя эти выражения в формулу для определения m (3.40), получаем окончательную формулу:
m m |
1 |
|
1 |
. |
(3.42) |
|
|
||||
|
kп |
kш |
|
||
|
|
||||
В производственных условиях более целесообразно вычислять погрешность m по разности двойных измерений:
m |
|
d |
2 |
, |
(3.43) |
|
|
||||
|
2n |
|
|
||
|
|
|
|
||
где d – разность двух ближайших определений гироскопического азимута исходной стороны, выполненных в разных условиях (например, до и после работы в шахте); n – число разностей.
3.6. Определение ошибок координат конечной точки свободного полигона
В практике маркшейдерских работ форму полигона определяют горные выработки. Обычно это висячие (свободные) ходы, т.е. ходы, опирающиеся на одну твердую сторону полигона. Под твердой сто-
29
роной понимают сторону, дирекционный угол которой определен. На ошибку координат такого полигона оказывают совместное влияние ошибки ориентирования (ошибки дирекционного угла исходной стороны), ошибки измерения углов и ошибки длин сторон полигона. Для удобства дальнейших вычислений необходимо указанные на плане проектного полигона значения горизонтальных углов с точностью до градуса, длин линий – до метра свести в табл. 3.2.
|
|
|
|
|
|
|
|
Таблица 3 . 2 |
|
Исходные данные проектного полигона |
|
||||||||
|
|
|
|
|
|
||||
Номер вершины |
|
Измеренные левые |
|
Сторона |
Длина стороны |
||||
угла полигона |
|
по ходу углы βi, …º |
|
полигона |
полигона li, м |
||||
1 |
|
|
|
2 |
|
|
3 |
|
4 |
Ствол № 1 |
|
|
|
– |
|
Ствол № 1–1 |
80 |
||
1 |
|
|
178 |
|
|
1–2 |
|
60 |
|
2 |
|
|
182 |
|
|
2–3 |
|
70 |
|
… |
|
|
… |
|
|
… |
|
… |
|
Ошибка положения конечного пункта M K складывается из |
|||||||||
ошибок координат M x |
и M y и составляющих ошибки положения |
||||||||
конечного пункта: |
|
|
|
|
|
|
|
|
|
M |
K |
|
M 2 |
M 2 |
|
M 2 |
M 2 |
M 2 , |
(3.44) |
|
|
x |
y |
|
0 |
|
l |
|
|
M x M x2 M x2 |
M x2 |
, M y |
M y2 |
M y2 |
M y2 , (3.45) |
||||
|
|
0 |
|
l |
|
|
0 |
|
l |
где M 0 ,M ,Ml – ошибки положения конечного пункта, зависящие
от погрешности определения дирекционного угла, ошибок измерения горизонтальных углов и длин линий соответственно; M x 0
и M y 0 – ошибки координат, обусловленные погрешностью определения дирекционного угла исходной стороны; M x и M y –
ошибки координат, обусловленные ошибками измерения горизонтальных углов; M xl и M yl – ошибки координат, обусловленные
ошибками измерения длин линий.
30