

ХПИ_ОРЗА_вар_Б_заочники / Книга по РЗА 2006 / 3. МИКРОПРОЦЕССОРНЫЕ УСТРОЙСТВА РЕЛЕЙНОЙ ЗАЩИТЫ, АВТОМАТИКИ, ДИСТАНЦИОННОГО УПРАВЛЕНИЯ
.pdf3.МИКРОПРОЦЕССОРНЫЕ УСТРОЙСТВА РЕЛЕЙНОЙ ЗАЩИТЫ, АВТОМАТИКИ, ДИСТАНЦИОННОГО УПРАВЛЕНИЯ
При написании главы, с согласия автора, использована книга В. Я. Шмурьёва. «Цифровые реле защиты.»
3.1 ОСНОВНЫЕ ХАРАКТЕРИСТИКИ МИКРОПРОЦЕССОРНЫХ УСТРОЙСТВ
Большинство фирм производителей оборудования РЗА прекращают выпуск электромеханических реле и устройств и переходят на цифровую элементную базу.
Переход на новую элементную базу не приводит к изменению принципов релейной защиты и электроавтоматики, а только расширяет ее функциональные возможности, упрощает эксплуатацию и снижает ее стоимость. Именно по этим причинам микропроцессорные устройства очень быстро занимают место устаревших электромеханических и микроэлектронных устройств.
Основные характеристики микропроцессорных защит значительно выше, чем у микроэлектронных, а тем более электромеханических. Так, мощность, потребляемая от измерительных трансформаторов тока и напряжения, находится на уровне 0,1—0,5 ВА, аппаратная погрешность — в пределах 2—5%, коэффициент возврата измерительных органов составляет
0,96—0,97.
Мировыми лидерами в производстве устройств РЗА являются концерны GE, AREVA (ALSTOM), ABB, SIEMENS. Общей для них является тенденция все большего перехода на цифровую технику. Цифровые защиты, выпускаемые этими фирмами, имеют высокую стоимость, которая, впрочем, окупается их высокими техническими характеристиками и многофункциональностью. Использование цифровых способов обработки информации в устройствах РЗА существенно расширило их возможности и улучшило эксплуатационные качества.
Впоследнее время выпуск микропроцессорных устройств РЗА освоили и ряд фирм России, Украины и других стран ближнего зарубежья. Компанией Энергомашвин (ЭМВ) разработан и выпускается целый комплекс микропрцессорных устройств, охватывающий практически полностью потребности распределительных сетей 6-110кВ.
Современные цифровые устройства РЗА интегрировали в рамках единого информационного комплекса функции релейной защиты, автоматики, измерения, регулирования и управления электроустановкой. Такие устройства в структуре автоматизированной системы управления технологическим процессом (АСУ ТП) энергетического объекта являются оконечными устройствами сбора информации.
Винтегрированных цифровых комплексах РЗА появляется возможность перехода к новым нетрадиционным измерительным преобразователям тока и напряжения – на основе оптоэлектронных датчиков, трансформаторов без ферромагнитных сердечников и т. д. Эти преобразователи технологичнее при производстве, обладают очень высокими метрологическими характеристиками, но имеют малую выходную мощность и непригодны для работы с традиционной аппаратурой.
3.2КРАТКОЕ ОПИСАНИЕ АППАРАТНОЙ ЧАСТИ
3.2.1 Структурная схема
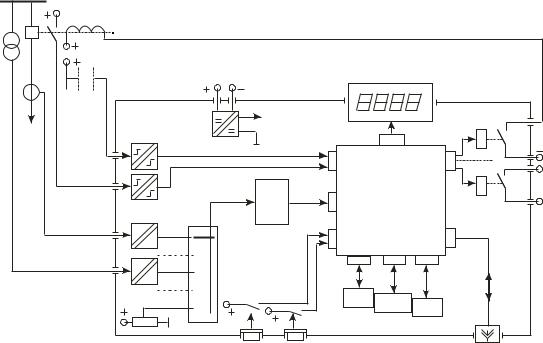
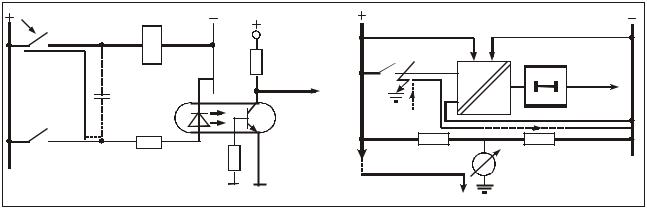
Цифровые устройства РЗ различного назначения имеют много общего, а их структурные схемы очень похожи и подобны представленной на рис. 3.1. Центральным узлом цифрового устройства является микроЭВМ, которая через свои устройства ввода-вывода обменивается информацией с периферийными узлами. С помощью этих дополнительных узлов осуществляется сопряжение микроЭВМ (микропроцессора) с внешней средой: датчиками исходной информации, объектом управления, оператором и т. д.
Непременными узлами цифрового устройства РЗА являются:
входные U1—U4 и выходные KL1—KLj преобразователи сигналов, тракт аналого-цифрового преобразования U6, U7, кнопки управления и ввода информации от оператора SB1, SB2, дисплей H для отображения информации и блок питания U5. Современные цифровые устройства, как правило, оснащаются и коммуникационным портом X1 для связи с другими устройствами.
Основные функции вышеперечисленных узлов следующие:
Входные преобразователи обеспечивают гальваническую развязку внешних цепей от внутренних цепей устройства. Одновременно, входные преобразователи осуществляют приведение контролируемых сигналов к единому виду (как правило, к напряжению) и нормированно-
1
му уровню. Здесь же осуществляется предварительная частотная фильтрация входных сигналов перед их аналого-цифровым преобразованием. Одновременно принимаются меры по защите внутренних элементов устройства от воздействия помех и перенапряжений. Различают преобразователи входных сигналов аналоговые (UЗ, U4) и логические (U1, U2). Первые стремятся выполнить так, чтобы обеспечить линейную (или нелинейную, но с известным законом) передачу контролируемого сигнала во всем диапазоне его изменения.
Преобразователи логических сигналов, наоборот, стремятся сделать чувствительными только к узкой области диапазона возможного нахождения контролируемого сигнала.
Выходные преобразователи. Воздействия устройства на защищаемый объект традиционно осуществляется в виде дискретных сигналов управления. При этом выходные цепи устройства защиты выполняются так, чтобы обеспечить гальваническую развязку коммутируемых цепей как между собой, так и относительно внутренних цепей устройства РЗ. Выходные преобразователи должны обладать соответствующей коммутационной способностью и, в общем случае, обеспечивать видимый разрыв коммутируемой цепи.
Q |
YAT |
|
|
|
|
|
|
|
TV |
SQ |
|
|
|
|
|
|
|
|
SA |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
TA |
|
|
|
220 B |
|
|
H |
|
|
0 |
B |
|
~ |
|
|
|
|
|
|
|
U5 |
|
|
|
Kl1 |
|
|
|
|
U1 |
|
|
U8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Микро ЭВМ |
KL j |
|
|
|
|
|
|
n |
|
||
|
|
|
U2 |
U7 |
Микро - |
|
||
|
|
|
|
|
|
|||
|
|
|
U6 |
|
# |
|
||
|
|
i |
|
процессор |
|
|||
|
|
UJ |
|
|
||||
|
|
|
|
|
|
|
||
|
|
u |
|
|
|
|
|
|
|
|
u u |
U4 |
SB1 |
U9 |
U10 |
U11 |
|
|
|
R1 |
|
ПЗУ |
ППЗУ ОЗУ |
|||
|
|
|
|
|
||||
|
|
|
|
|
SB2 |
|
|
Х1 |
|
Рис. 3.1. Структурная схема цифрового устройства защиты |
|||||||
Тракт аналого-цифрового преобразования включает мультиплексор U6 и собственно ана-
лого-цифровой преобразователь (АЦП) — U7. Мультиплексор — это электронный коммутатор, поочередно подающий контролируемые сигналы на вход АЦП. Применение мультиплексора позволяет использовать один АЦП (как правило, дорогостоящий) для нескольких каналов. В АЦП осуществляется преобразование мгновенного значения входного сигнала в пропорциональное ему цифровое значение. Преобразования выполняются с заданной периодичностью. В последующем в микроЭВМ по этим выборкам из входных сигналов рассчитываются интегральные параметры контролируемых сигналов — их амплитудные или действующие значения.
Блок питания (БП) U5 обеспечивает стабилизированным напряжением все узлы рассматриваемого устройства, независимо от возможных изменений напряжения в питающей сети. Обычно это импульсный БП с питанием от сети постоянного тока. Имеются также блоки питания от цепей переменного напряжения и тока (переменный оперативный ток).
Дисплеи и клавиатура являются непременными атрибутами любого цифрового устройства, позволяя оператору получить информацию от устройства, изменять режим его работы, вводить новую информацию. Надо отметить, что дисплей H и клавиатура SB1, SB2 цифровых устройств, как правило, реализуются в максимально упрощенном виде: дисплей — цифробуквенный, одно- (или несколько-) строчный; клавиатура — несколько кнопок.
Порт связи с внешними цифровыми устройствами. Достоинством цифровых устройств является возможность передачи имеющейся информации в другие цифровые системы: АСУ ТП, персональный компьютер и т. д., что позволяет интегрировать различные системы, экономя на каналах связи, затратах на предварительную обработку сигналов и т. п. Комму-
2
никационный порт — необходимый элемент для дистанционной работы с данным устройством.
Наряду с вышеперечисленными, цифровые устройствах, в общем случае, могут содержать и другие узлы, например, цифро-аналоговые преобразователи - при формировании аналоговых сигналов управления и регулирования.
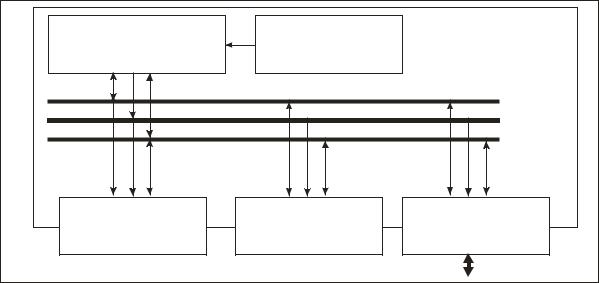
Практически вся обработка информации в любом цифровом устройстве осуществляется внутри микроЭВМ по определенному алгоритму, реализованному в виде программы работы. Для облегчения понимания принципов работы цифровых устройств РЗА необходимо иметь хотя бы общее представление об устройстве и функционировании ЭВМ. Рассмотрим структурную схему микроЭВМ, представленную на рис. 3.2.
Центральный управляющий и решающий блок микроЭВМ называется центральным процессорным устройством (Central Processing Unit-CPU) или просто процессором. Этот узел в виде интегральной микросхемы (ИМС), что дало повод называть такую ИМС микропроцессором. Как видно из структурной схемы, микроЭВМ МП в качестве самостоятельного узла не применяется.
Для его работы требуется внешнее запоминающее устройство, где хранится программа (последовательность команд), которую необходимо выполнить. В устройствах, работающих по жесткой программе, какими и являются устройства защиты, программа записывается в постоянном запоминающемся устройстве (ПЗУ).
Центральное |
Тактовый |
Микро ЭВМ |
Процессорное |
|
|
Устройство |
генератор |
|
|
|
ШД |
|
|
ША |
|
|
ШУ |
Память |
Память |
Устройство |
Устройство |
||
Память |
Память |
Ввода |
Программы |
Данных |
Ввода |
Данных |
Данных |
Вывода |
|
|
вывода |
Рис. 3.2 Структурная схема микроЭВМ Для хранения переменных и промежуточных результатов вычислений (данных) применяется оперативное запоминающее устройство (ОЗУ).
Обмен информацией с внешним оборудованием осуществляется с помощью устройств вво- да-вывода.
Любая информация в ЭВМ представляется в виде чисел (числовых кодов). Обмен информацией между узлами микроЭВМ осуществляется с помощью шин, т. е. системы электрических линий. Шины различаются по функциям: шина пересылки данных ЩД, шина адреса ША, шина передачи команд управления ШУ. Например, при чтении данных из устройства ввода-вывода (УВВ) в процессор последний выставляет на ША адрес УВВ, а на ШУ— сигналы, предписывающие УВВ выдать данные на ЩД. В результате этого на шине данных появляется число, которое было в УВВ в момент обращения. При передаче информации используется двоичная система счисления, требующая для отображения чисел использования только двух символов 0 и 1, что делает наиболее простой реализацию узлов ЭВМ на основе электрических схем.
Скорость работы микроЭВМ существенно зависит от разрядности чисел, передаваемых по шинам от узла к узлу. Это определяется разрядностью шины данных. Современные микроЭВМ работают с 16- и 32-разрядными машинными словами. Время выполнения команды определяется тактовой частотой задающего генератора и зависит от быстродействия применяемых ИМС, что в свою очередь определяется технологией их изготовления. Сегодня электронной промышленностью предлагаются десятки разновидностей МП, и они непрерывно совершенствуются.
3
По этой причине происходит периодическое обновление аппаратной базы и в цифровых устройствах РЗА.
Сигналы, контролируемые устройствами РЗА, имеют в общем случае разную физическую природу — токи, напряжения, температура и т. д. Чаще всего устройства РЗ работают с сигналами от источников переменного тока и напряжения, с традиционными номинальными уровнями: 1 А, 5 А, 100 В. Такие уровни сигналов обеспечивают необходимую помехозащищенность, но совершенно неприемлемы для обработки в электронных схемах. При подключении микропроцессорных устройств к традиционным датчикам тока и напряжения требуется приведение их сигналов к единому виду и диапазону изменения, приемлемому для обработки электронными узлами.
Входные преобразователи
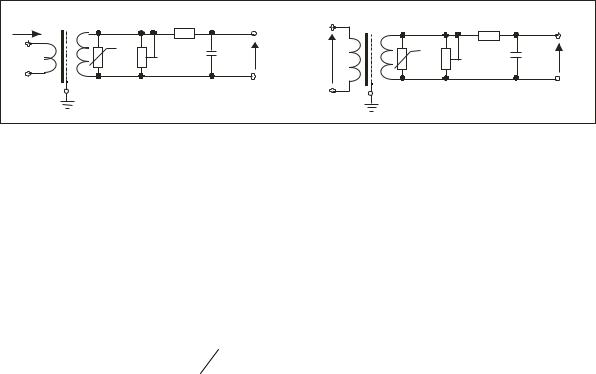
Наиболее часто входные согласующие преобразователи цифровых устройств выполняются на базе обычных электромагнитных трансформаторов с ферромагнитным сердечником. Несмотря на то, что такие трансформаторы имеют нелинейные передаточные характеристики, определенный разброс параметров, некоторую нестабильность во времени и при изменении температуры, они все же приемлемы для построения устройств РЗ, допускающих работу с погрешностью 2—5%.
В трансформаторных преобразователях (рис. 3.3) основное внимание уделяется снижению междуобмоточной емкости, по которой возможно попадание импульсных помех внутрь устройства. С этой целью секционируют вторичную обмотку, или помещают между первичной и вторичной обмотками электростатический экран. Ввиду очень малого потребления мощности последующими электронными узлами, преобразование токовых сигналов в напряжение осуществляют простейшим способом — с использованием шунтов R. Для защиты электронных узлов от возможных перенапряжений широко применяют варисторы RV (или стабилитроны) и фильтры нижних частот, например, на основе R/C-цепей. Эффективность фильтра нижних частот объясняется тем, что энергия импульсной помехи сосредоточена в высокочастотной части спектра. Ограничение полосы пропускания тракта в области высоких частот необходимо и для правильной работы аналого-цифрового преобразователя, независимо от того, будет ли в последующем применяться цифровая фильтрация сигналов или нет.
TAL |
Rф |
|
TVL |
Rф |
|
|
Iвх |
Cф |
Uвых Uвх |
|
Cф |
Uвых |
|
RV |
RV |
|||||
R |
|
R |
|
|||
|
a) |
|
|
б) |
|
Рис. 3.3. Входные преобразователи на основе промежуточных трансформаторов
Аналогово-цифровые преобразователи
Дискретный (цифровой) сигнал, в отличие от аналогового, может принимать лишь конечное множество значений и определен лишь для конкретных моментов времени.
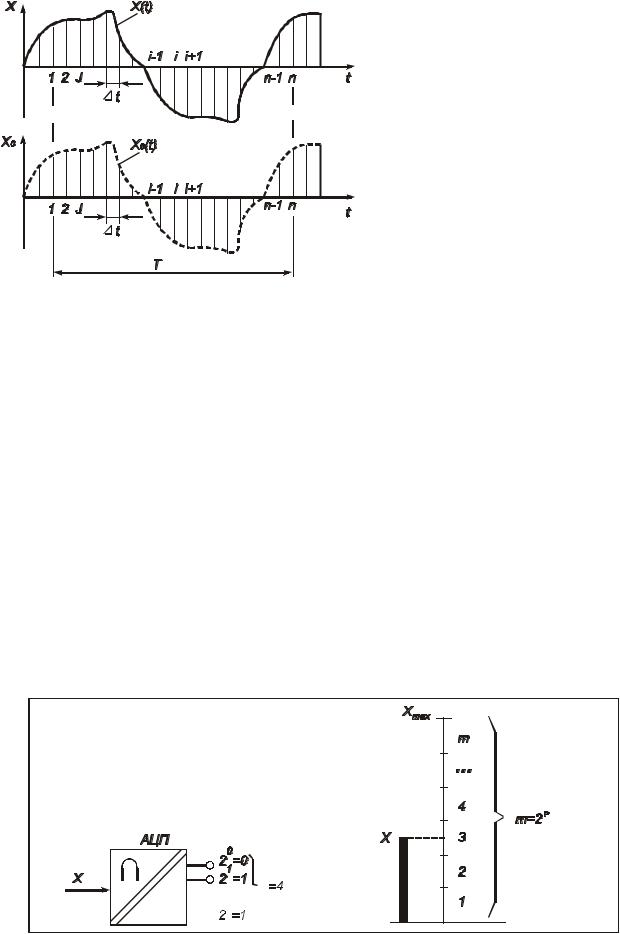
Процесс перехода от аналогового сигнала к дискретному называется дискретизацией или квантованием сигнала, а устройства, выполняющие эту операцию, называются аналогоцифровыми преобразователями (АЦП). Переход от непрерывного сигнала к дискретному всегда происходит с потерей некоторого количества информации. Конечное число градаций дискретного сигнала обуславливает погрешность квантования по уровню, а одной из причин необходимости квантования по времени является то, что и сам процесс аналого-цифрового преобразования, и последующий цикл вычислений в микроЭВМ требует определенного времени, по истечении которого можно делать новую выборку из входного сигнала (рис. 3.4).
Характеризуя АЦП, говорят о его разрядности и интервале дискретизации сигнала по времени ∆t или частоте выборок fB = 1Дt , или, если речь идет о периодических сигналах с перио-
дом Т, о количестве выборок за период N = fB T .
Для периодических сигналов существует взаимосвязь между верхней частотой преобразуемого сигнала и необходимым количеством выборок. Для точного восстановления первоначального сигнала из его дискретного представления частота выборок должна по крайней мере вдвое превышать самую высокочастотную гармоническую составляющую входного сигнала, т.е.:
fB ≥ 2 fmax .или N ≥ 2 fmaxT
4
|
Более того, при аналого-цифровом |
|
|
преобразовании из входного сигна- |
|
|
ла должны быть исключены все |
|
|
гармоники с частотой, более высо- |
|
|
кой, чем частота квантования. В |
|
|
противном случае, при восстанов- |
|
|
лении сигнала появляется разност- |
|
|
ная составляющая низкой частоты, |
|
|
поэтому на входе АЦП всегда уста- |
|
|
навливают аналоговый фильтр ниж- |
|
|
них частот с полосой пропускания |
|
|
не более fB. |
|
|
В устройствах РЗА применяют АЦП |
|
|
с частотой |
выборок от 600 до |
|
2000 Гц. Более высокая частота вы- |
|
|
борок используется в том случае, |
|
Рис. 3.4 Аналого-цифровое преобразование сигна- |
когда устройства защиты обеспечи- |
|
вает еще и |
осциллографирование |
|
ла |
аварийного процесса. |
|
|
||
Цифровое устройство с частотой выборок 2000 Гц эквивалентно осциллографу с полосой пропускания 0—1000 Гц. Для сравнения отметим, что запись звука на компакт-дисках осуществляется с частотой дискретизации около 44 кГц, что обеспечивает качественное воспроизведение фонограмм, включая частоты свыше 20 кГц.
Второй важной характеристикой АЦП является разрядность р формируемого им двоичного числа. Для того, чтобы выяснить каким должно быть значение р, рассмотрим работу АЦП как некоего "черного ящика" (рис. 3.5), на вход которого поступает аналоговый сигнал X, а на его цифровых выходах появляется эквивалентное число в виде двоичных сигналов с двумя возможными уровнями, условно обозначаемыми как 0 и 1. Кстати, представление числа напряжениями или током только двух уровней и делает предпочтительней двоичную систему счисления.
Существует однозначная связь между разрядностью АЦП и точностью измерения аналоговой величины. Например, в двухразрядном АЦП на его двух выходах возможно формирование только четырех независимых числовых комбинаций: 00, 01, 10 и 11. Эти числа можно интерпретировать как нахождение входного аналогового сигнала в одном из четырех поддиапазонов, ограниченных 0 – Хтах. В случае р-разрядного АЦП возможно отождествление нахождения входного сигнала в любом из т = 2р поддиапазонов. При этом ступенька квантования при определении уровня сигнала составит Хmax/ 2р. В энергетике из всех величин в наиболее широком диапазоне изменяется ток. Ток при нормальном режиме работы электроустановки находится в пределах 0 – Iном, а в аварийных — достигает (10+30)Iном. Для преобразования с погрешностью не более 2—5 % требуемое число ступеней квантования т должно быть 2000 ÷ 4000, т. е. требуется АЦП с р = 11+12.
# 





Рис. 3.5 К пояснению разрядности АЦП
5
Ввод дискретных сигналов
Практически во всей современной электронной аппаратуре ввод дискретных сигналов осуществляется через преобразователи на основе оптронов. Следует отметить, что схемы реальных преобразователей гораздо сложнее, чем схемы, приведенные на рис. 3.6.
Собственное время переключения оптронов составляет доли микросекунды. Для оптопары (светодиод-фотоприемник) характерна малая проходная емкость, что препятствует проникновению помех по этому пути. Допустимое напряжение между цепью управления и элементами управляемой цепи достигает нескольких киловольт, а рабочий ток светодиода VD составляет 3—5 мА.
S1 |
KL |
|
EП |
|
|
|
|
|
S |
E |
DT~3 мс |
|
|
|
RH |
|
|
In |
C |
VD |
U |
U |
Uвых |
|
|
вх |
|||
S2 |
|
Rв |
вых |
|
|
|
|
|
|
||
|
|
VТ |
|
|
|
|
|
Rб |
R |
R |
|
|
a) |
|
|||
|
|
|
|
|
|
|
|
|
|
б) |
|
Рис. 3.6 Варианты ввода дискретного сигнала Малый входной ток оптрона с одной стороны является благом, так как приводит к снижению
мощности, потребляемой преобразователем, решает проблему рассеивания тепла резистора Rб и уменьшает нагрузку на управляющий контакт S2 (рис. 3.6, а). Но с другой стороны, малый рабочий ток оптрона приводит к ряду проблем.
В первую очередь, малый входной ток обуславливает низкую помехозащищенность преобразователя. Например, при наличии протяженного проводника, связывающего управляющий ключ S2 с оптроном, возможно ложное срабатывание при перезарядке паразитной емкости С в момент замыкания ключа S1 в сторонней цепи. Чтобы исключить ложную работу устройства РЗ в такой ситуации, на выходе преобразователя устанавливают элемент задержки DT (рис. 3.6, б) с фиксированной или регулируемой задержкой в формировании выходного сигнала. Для того, чтобы отстроиться от переходных процессов, обычно достаточно задержки
0,5—3 мс.
Устройства с малым потреблением могут реагировать на замыкания на землю в сети оперативного тока, так как их входной ток соизмерим с током цепи контроля изоляции сети оперативного тока. Для исключения этого, входные цепи измерительного преобразователя Е выполняют с привязкой к потенциалам полюсов сети оперативного тока, и поднимают порог переключения преобразователя Е до уровня 60—80% номинального напряжения сети.
Выходные реле
Несмотря на очевидные достижения в области высоких потенциалов и сильных токов, в цифровых устройствах, в большинстве случаев, в качестве выходных элементов по-прежнему используются промежуточные электромагнитные реле. Контактная пара пока еще остается вне конкуренции как единственное устройство, обеспечивающее видимый разрыв в коммутируемой цепи. К тому же, это и самое дешевое решение. Как правило, в цифровых устройствах РЗ применяются несколько типов малогабаритных реле: с большей коммутационной способностью — для работы непосредственно в цепях управления выключателей, с меньшей — для работы в цепях сигнализации. Мощные реле способны включать цепи с током примерно 5— 30 А, но их отключающая способность обычно не превосходит 0,2 А при постоянном напряжении 220 В. Таким образом, схема управления должна предусматривать прерывание тока в цепи электромагнита выключателя его вспомогательным контактом. Отключающая способность применяемых сигнальных реле обычно не превышает 0,15 А в цепях постоянного тока напряжением 220 В.
Отображение информации
Для отображения информации в микропроцессорных устройствах используются и отдельные светодиодные индикаторы, жидкокристаллические минидисплеи, и даже графические экраны. Для простоты будем называть совокупность элементов визуального отображения информации в устройстве дисплеем.
6
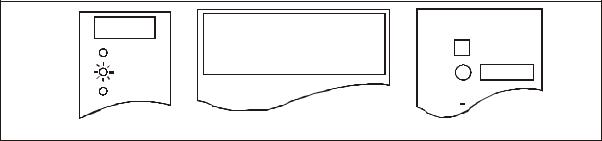
Очевидно, что дисплей не должен быть дорогим, так как "общение" человека с устройством происходит крайне редко. Дисплей должен обеспечивать быстрое и однозначное представление информации. Этим требованиям удовлетворяют простые дисплеи в виде светодиодных индикаторов. С другой стороны, цифровое устройство защиты — это устройство, которое способно предоставить оператору очень большой объем информации: текущие значения токов и напряжений электроустановки, их аварийные значения, уставки (а их в цифровых устройствах может быть несколько наборов), состояние входов и выходов управления и т. д. Для оперативного получения такого объема информации требуются соответственно и более информативные дисплеи. На рис. 3.7 представлены некоторые варианты выполнения дисплеев устройств РЗ.
Внекоторых типах цифровых устройств защиты (рис. 3.7, а) отдельный светодиодный индикатор (или крайний левый разряд цифрового светодиодного табло) указывает на отображаемый параметр, а численное значение этого параметра выводится в трех правых разрядах цифрового табло. Светодиодный дисплей хорошо заметен, особенно в условиях малой внешней освещенности.
Вболее современных устройствах применяются цифробуквенные многострочные табло (рис. 3.7, б), что обеспечивает удобство считывания информации. Такие табло выполняются на основе жидкокристаллических индикаторов (ЖКИ). Основными недостатками ЖКиндикаторов являются относительно низкая контрастность изображения и неработоспособность при низких температурах. Однако, невысокая стоимость и легкость управления ЖКИ способствует их широкому применению, в том числе и в устройствах РЗА. В последнее время
появились более дорогие ЖКИ, способные работать при температурах до -25°С.
8082 |
Ток фазы А = 245 кА |
|
|
|
|
|
|
|
|
|
Q2 |
|
|
|
|
|
|
||||
Ia / In |
Ток фазы B = 242 кА |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|||||
Ток фазы С = 247 кА |
|
|
|
|
|
|
|
|
|
|
TA2 |
|
|
|
|
|
|||||
Ib / In |
|
|
|
|
|
245 кА |
||||
|
J00/5 |
|
|
|
|
|||||
|
|
|
|
|
||||||
Ic / In |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a) |
б) |
|
|
|
|
|
|
|
в) |
|
Рис. 3.7. Варианты дисплеев цифровых устройств защиты Наиболее наглядно информация представляется на графическом дисплее, что в какой-то мере демонстрирует рис. 3.7, в.
Цифровые устройства имеют погрешность 2 — 5%. С учетом этой погрешности и выполняются дисплеи цифровых устройств — с возможностью отображения лишь трех значащих цифр. В цифровых устройствах используются в основном два способа представления величин — в именованных единицах (вольтах, амперах, градусах и т. д.) и в относительных. Оперативному персоналу удобнее работать с именованными величинами, отражающими реальные значения токов, напряжений и других параметров электроустановки. Но это требует занесения в устройство дополнительной информации — коэффициентов трансформации измерительных трансформаторов, а на дисплей необходимо дополнительно выводить размерность отображаемой величины. Альтернативным решением является представление всех величин в относительных единицах или процентах. Чаще всего за базисные единицы принимают номинальные значения контролируемых величин.
Управление аппаратурой
Кнопки управления или клавиатура являются неотъемлемыми элементами связи человека с цифровым устройством. С помощью клавиатуры можно изменить режим работы устройства, вызвать на дисплей интересующие параметры и величины, ввести новые уставки и т. д.
Число кнопок, используемых в клавиатурах различных устройств РЗ, варьируется от двух до десяти. Чем больше кнопок в клавиатуре, тем удобнее и быстрее можно вводить информацию в устройство. Однако, кнопки являются наиболее ненадежными элементами цифровой аппаратуры. Поэтому там, где пользоваться клавиатурой приходится крайне редко, стремятся использовать минимальное число кнопок. Минимальное число кнопок клавиатуры, позволяющее вводить любую информацию, равно двум, оптимальное — 5: вверх, вниз, влево, вправо, ввод.
7
t<0.5 c S2 t>0.5 c
Ia(1) |
Ia(n-1) |
Ia(n-2) |
Ia(1) |
t<0.5 c
S1 Ib(n)  Ib(n-1)
Ib(n-1)  Ib(n-2)
Ib(n-2)  Ib(1)
Ib(1)
t>0.5 c
Ic(n) |
Ic(n-1) |
Ic(n-2) |
Ic(1) |
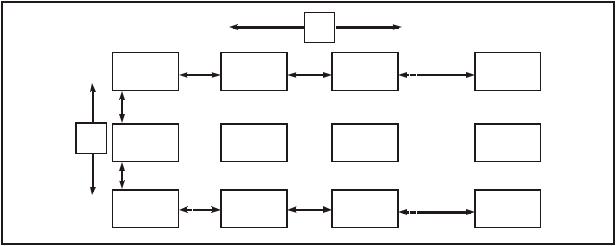
Рис. 3.8 Поиск информации в памяти устройства Состояния, доступные с помощью кнопок управления, представляются двухмерным масси-
вом. Продвижение по координатам массива осуществляется соответствующими кнопками, а выбор элемента массива производится одновременным нажатием кнопки “ENTER”. Поясняет этот принцип рис. 3.8, где в качестве примера рассматривается процесс поиска информации о фазных токах, которые фиксировались в памяти защиты в момент срабатывания при помощи двухкнопочной клавиатуры. Предполагается, что в памяти данного устройства хранится информация по п последним событиям, причем последнее событие имеет номер п.
Устройства хранения информации
Одним из важнейших узлов цифровых устройств являются устройства хранения информации.
Внастоящее время для хранения информации используются различные типы статических запоминающих устройств, которые в функциональном отношении подразделяются на ПЗУ, ОЗУ и ЭППЗУ.
Для хранения рабочей программы в устройствах защиты обычно используются постоянные запоминающие устройства - ПЗУ. Отличительной чертой ПЗУ является однократная запись информации. В последующем возможно только считывание записанной информации. Отсюда и происходит англоязычное название этого типа памяти RОМ (Read Only Memory — только считываемая память). Достоинством микросхем ПЗУ является их низкая стоимость и возможность хранения информации при отключении питания.
Впоследнее время все шире начинают применяться так называемые перепрограммируемые устройства памяти. Особенно они актуальны для устройств защиты, рабочая программа которых должна изменяться в процессе эксплуатации. В настоящее время существуют устройства РЗА, у которых нужные функции защиты выбираются из библиотеки стандартных функций самим пользователем. Логическая часть этих устройств РЗА создается пользователем из базовых логических функций типа И, ИЛИ, ТРИГГЕР и т. д. Рабочая программа в таких устрой-
ствах защиты располагается в перепрограммируемом постоянном запоминающем уст-
ройстве (ППЗУ или ЕЕРRОМ — Electrical Erasable Programmable Read Only Memory — элек-
трически перезаписываемая постоянная память). Подчеркнем, что ППЗУ является энергонезависимой памятью, т. е. хранимая в ней информация не разрушается в обесточенном состоянии.
Для временного хранения результатов промежуточных вычислений используются опера-
тивные запоминающие устройства (ОЗУ или иначе RАМ — Random Access Memory —
память с произвольным доступом). Запись и считывание данных в ОЗУ осуществляется с максимальной скоростью. Существенным недостатком ОЗУ является разрушение информации при отключении питания.
Для хранения уставок и других параметров, которые приходится изменять в процессе эксплуатации защиты, используются ППЗУ, допускающие многократное изменение уставок. Промежуточным решением задачи стало хранение уставок в ОЗУ, имеющем резервное питание от встроенного в изделие источника О. В таких устройствах применяют специальные малопотребляющие ИМС и литиевые батареи, имеющие срок службы 5—6 лет. Недостаток очевиден — необходим периодический контроль и своевременная замена источника питания. Как и любое другое изделие, устройства памяти могут повреждаться или терять информацию, например, под воздействием ионизирующих излучений. Для обнаружения этого применяются следующие способы.
8
ВПЗУ, где данные размещаются в ячейках памяти, последовательно выполняют формальное суммирование всех чисел этого массива данных, а результат (контрольную сумму) помещают в определенную ячейку. В режиме тестовой проверки ПЗУ компьютер рассматривает его как объект исследования, выполняет подсчет суммы фактических чисел, хранящихся в ячейках, и сравнивает с контрольной суммой. При проверке ОЗУ в его ячейки поочередно записывают нули и единицы, а затем анализируют получающиеся при считывании результаты.
Вустройствах с ЕЕРRОМ-памятью имеется возможность даже восстанавливать утерянную информацию. Для этого важнейшие массивы информации, например, уставки, дублируются в разных микросхемах памяти. Так как одновременное повреждение информации в двух микросхемах маловероятно, то имеется возможность восстановить информацию перезаписью содержимого неповрежденного массива на место поврежденного.
Блоки питания
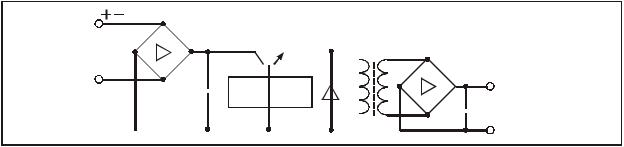
Практически во всех современных устройствах используются импульсные блоки питания, выполняемые на базе высокочастотных инверторов. Схематично такой БП с однотактным инвертором представлен на рис. 3.9
Uвх |
|
|
VС1 |
|
|
VT1 |
T |
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
VС2 |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
СУ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
С1 |
|
|
|
|
|
|
|
VD1 |
|
|
|
|
|
|
|
|
|
Uвых |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
С2 |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 3.9
Упрощенная схема импульсного блока питания: СУ — схема управления
С помощью электронного ключа, выполненного на транзисторе VТ1, на первичную обмотку развязывающего трансформатора T подаются импульсы напряжения с частотой несколько десятков килогерц. Трансформатор, работающий на высокой частоте, получается небольших габаритов, с малым числом витков в обмотках, но с относительно большой проходной мощностью. Использование широтно-импульсной модуляции при управлении ключом VТ1 позволяет поддерживать стабильным выходное напряжение инвертора при изменении питающего напряжения в широких пределах. Например, устройства серии MODULEX 3 устойчиво работают при изменении напряжения питания от 64 до 300В. Для исключения повреждения инвертора при несоблюдении полярности подаваемого напряжения, на его входе устанавливается диодный мост VC1. Емкости накопительных конденсаторов С1 и С2 обычно выбирают из соображения требуемого сглаживания пульсации в выходном напряжении при питании инвертора от выпрямленного постоянного тока. В некоторых случаях емкости С1 и С2 увеличивают до уровня, достаточного для исключения сбоев в микропроцессорной части при кратковременных понижениях питающего напряжения, возникающих, например, при коротких замыканиях на смежных фидерах в сети оперативного тока. Отметим, что в БП большое внимание уделяется защите от перенапряжений в питающей сети и исключению проникновения помех внутрь устройства.
Интерфейсы цифровых устройств
Под интерфейсом понимается совокупность аппаратных, программных и конструктивных средств, необходимых для реализации взаимодействия различных цифровых устройств, объединенных в систему.
По принципу обмена информацией интерфейсы подразделяются на интерфейсы с парал-
лельной и последовательной передачей данных.
Наиболее быстрый обмен информацией между двумя цифровыми устройствами обеспечивает параллельный интерфейс, упрощенная схема которого представлена на рис. 3.10, а.
В этом случае по синхронизирующему сигналу СС (в действительности это может быть последовательность из нескольких сигналов управления) передающее устройство выставляет на шину данных ШД одновременно все разряды передаваемого числа, а приемное устройство его считывает. Как видно, параллельный интерфейс требует достаточно сложного тракта передачи, включающего п + 1 физические линии при п-разрядном слове передаваемых данных. Чаще всего этот тип интерфейса применяется при передаче информации на небольшие расстояния (например, при связи компьютера с принтером) или при необходимости обеспечить наивысшую скорость обмена.
9
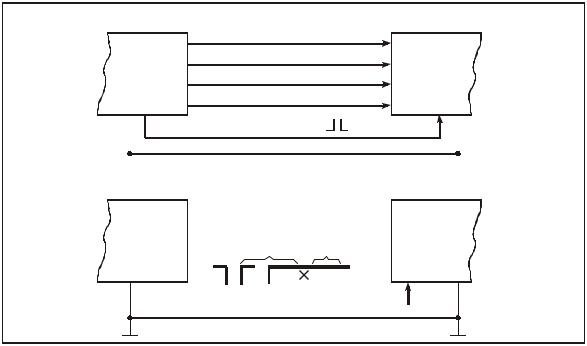
Технически более просто выполняется интерфейс с последовательной передачей данных. В этом случае слово данных передается последовательно разряд за разрядом. Наиболее распространен асинхронный режим передачи данных, схематически представленный на рис. 3.10, б. Асинхронный способ передачи данных требует минимального количества линий. При асинхронной передаче используют определенные договоренности, позволяющие приемнику распознать не только начало и окончание передачи, но и даже обнаруживать искажение информации при передаче. Это обеспечивается следующим образом. В режиме ожидания передатчик выдает в линию сигнал логической единицы. Начало передачи приемник распознает по появлению на линии логического нуля. Это так называемый стартовый бит СТБ. Длительность передачи одного бита заранее оговорена, т. е. приемник и передатчик должны быть предварительно настроены. После окончания передачи стартового бита СТБ, передатчик передает разряд за разрядом биты данных БД. После передачи данных следует так называемый бит паритета БП. Бит паритета по договоренности устанавливается передатчиком в состояние логической единицы, если в бите (слове) данных нечетное число единиц, и используется "четный" паритет. И, наоборот, в случае договоренности о работе с "нечетным" паритетом, биту паритета присваивается нулевое значение. Таким образом, используя бит паритета, приемник способен обнаруживать единичные сбои при передаче данных. Оканчивается сообщение передачей стоповых битов СПБ (1; 1,5 или 2 бита). По сути, стоповые биты определяют минимальный интервал между передачей отдельных слов данных. При асинхронной передаче обычно используется стандартный ряд скоростей: 300, 600, 1200, 2400, 4800, 9600,19200, 38400 бит/с и т. д.
Передатчик |
|
|
ШД |
1 |
|
|
|
|
Приемник |
|||||||||||||||||||||||
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
СС |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а) |
|
|
|
|||||||||||||||
Передатчик |
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Приемник |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
СТБ БД |
БП СПБ |
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
1 |
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
1 |
|
0 1 |
|
0 1 |
|
1 |
|
|
|
|
1 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б)
Рис. 3.10 Варианты обмена информацией Существует достаточно много стандартов на каналы последовательной связи. Стандарты отличаются по скорости обмена, организации и длине линий связи и т. д.
Наиболее известен стандарт RS232, применяемый в IВМ-совместимых ПК. Стандарт RS232С разработан в 1969 г. Интерфейс обеспечивает дальность связи до 15 м со скоростью до 19 200 бод. Уровни используемых сигналов:
лог. 0 = +3 ÷ +25 В, лог. 1 = -3 ÷ -25 В. Сопротивление нагрузки 3 -7 кОм.
В ряде цифровых устройствах порт последовательной связи выполнен в стандарте RS485. В этом стандарте используются сигналы с уровнями: лог. 0 = 0 В, лог. 1 = +5 В. Стандарт RS485 требует симметричный канал (витая пара). Обеспечивает связь сегментами длиной до 1200 м с возможностью подключения до 32 узлов на сегмент. Минимальное сопротивление нагрузки
— 60 Ом; скорость обмена—до 10 Мбит/с.
Как видно, порты у цифрового устройства и персонального компьютера выполнены в разных стандартах, что исключает их непосредственное соединение. Для их соединения требуется элементтак называемый преобразователь протоколов (конвертор).
10