

I Механика
Механика – наука, изучающая перемещение в пространстве твердых тел и равновесие их под воздействием сил.
Кинематика – раздел механики, изучающий движение твердых тел, не интересуясь причинами, обусловливающих это движение.
Тела, которые при движении не деформируются – твердые тела.
§1 Основные кинематические характеристики движения материальной точки
(радиус-вектор, скорость, ускорение)
Механическое движение твердого тела сводится к двум видам: поступательному и вращательному.
Опр.
Поступательное движение – движение, при котором любая прямая, связанная с этим телом, перемещается параллельно самой себе.
Опр.
Вращательное движение – движение твердого тела, при котором все точки данного тела движутся по окружности, при этом центры окружностей лежат на одной прямой. При этом любое механическое движение можно разбить на поступательное и вращательное.
Опр.
Материальная точка – тело, размерами которого можно пренебречь в условиях данной задачи.
Учитывая, что при поступательном движении твердого тела конечных размеров, все его точки движутся совершенно одинаково (у них одинаковые, но смещенные друг относительно друга траектории, скорость и ускорения в любой момент времени), то кинематика поступательного движения твердого тела сводится к кинематике материальной точки.
Для описания движения необходимо выбрать систему отсчета.
Опр.
Система отсчета – совокупность тела отсчета, системы координат, способа измерения времени.
|
|
Положение материальной точки в системе отсчета принято задавать радиус-вектором, начало которого совпадает с началом координат, а конец с самой точкой. Проекция радиус-вектора на оси совпадает с координатами материальной точки (x,y,z) |
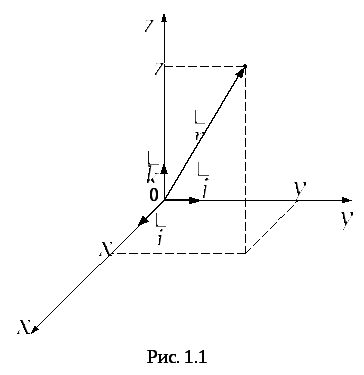
Если по осям направить единичные вектора
![]() ,
то радиус-вектор можно представить в
виде суммы трех взаимно перпендикулярных
векторов.
,
то радиус-вектор можно представить в
виде суммы трех взаимно перпендикулярных
векторов.
![]()
Или, как говорят, разложить вектор по
базису ортогональных векторов. Длина,
или модуль:
![]()
![]()

|
|
Пусть материальная точка перемещается
вдоль кривой линии L,
называемой траек-торией. При этом в
момент времениtматериальная точка находилась в
положении 1, с радиус-вектором |

с радиус-вектором
![]() ,
а спустя время
,
а спустя время![]() в
положении 2 с радиус-вектором
в
положении 2 с радиус-вектором![]() .
Длина траектории
.
Длина траектории![]() ,
заключенная между двумя точками 1 и 2 –
длина пути материальной точки за время
,
заключенная между двумя точками 1 и 2 –
длина пути материальной точки за время![]() t.
t.![]() r,
направленный из 1 в 2, есть вектор
перемещения материальной точки за время
r,
направленный из 1 в 2, есть вектор
перемещения материальной точки за время![]() t:
t:
![]()
![]() среднее
значение скорости материальной точки
на участке траектории 1-2 или за время
среднее
значение скорости материальной точки
на участке траектории 1-2 или за время![]() t,
равное отношению
t,
равное отношению![]() ко
времени
ко
времени![]() ,
за которое произошло это перемещение.
,
за которое произошло это перемещение.
![]()
![]()
![]() Вектор
Вектор![]() направлен по
направлен по![]() .
.
![]() Вектор
Вектор![]() ,
равный
,
равный![]() ,
за которое это перемещение произошло,
при стремлении
,
за которое это перемещение произошло,
при стремлении![]() к 0, называется мгновенной скоростью
материальной точки в положении 1 или
момент времениt:
к 0, называется мгновенной скоростью
материальной точки в положении 1 или
момент времениt:
![]()
![]() ,
,
![]() т.е
вектор скорости
т.е
вектор скорости![]() равен
производной от радиус-вектора
равен
производной от радиус-вектора![]() по
времени.
по
времени.
![]()

Отметим, что при уменьшении времени
![]() точка 2 приближается к точке 1, и угол
между вектором
точка 2 приближается к точке 1, и угол
между вектором![]() и касательной к траектории в точке
1уменьшается и в пределе стремится к 0.
Таким образом, в точке 1 и в любой другой
точке траектории вектор
и касательной к траектории в точке
1уменьшается и в пределе стремится к 0.
Таким образом, в точке 1 и в любой другой
точке траектории вектор![]() направлен
всегда по касательной к траектории (или
всегда направлен по направлению движения)
направлен
всегда по касательной к траектории (или
всегда направлен по направлению движения)
Найдем связь между проекциями векторов
![]() и
и![]() .
С одной стороны, согласно определению,
.
С одной стороны, согласно определению,
![]()
![]() .
.
С другой стороны вектор
![]() можно
разложить по базису
можно
разложить по базису![]() .
Сравнивая эти выражения для
.
Сравнивая эти выражения для![]() получаем,
что
получаем,
что![]() ,
,![]() .
.![]() .
При этом модуль скорости, согласно
теореме Пифагора, равен
.
При этом модуль скорости, согласно
теореме Пифагора, равен
![]()
![]()
![]() можно найти, используя понятие длины
пути, проходимого материальной тоской.
можно найти, используя понятие длины
пути, проходимого материальной тоской.
Т.к. предел отношения модуля вектора
перемещения к длине пути при стремлении
![]() к нулю равен 1, то модуль скорости
равняется
к нулю равен 1, то модуль скорости
равняется![]() ,
т.е. модуль вектора скорости равен
производной от пути, проходимого
материальной точкой, по времени.
,
т.е. модуль вектора скорости равен
производной от пути, проходимого
материальной точкой, по времени.
|
|
С течением времени при движении
материальной точки по траектории
вектор скорости в общем случае
изменяется как по величине, так и по
направлению. Пусть в точке 1 траектории
в момент времени tвектор
скорости равен |

![]() равен
равен![]() .
Тогда вектор приращения скорости за
время
.
Тогда вектор приращения скорости за
время![]() равен
равен![]() .
.
Вектор
![]() ,
равный отношению вектора приращения
скорости ко времени
,
равный отношению вектора приращения
скорости ко времени![]() ,
за которое происходит это приращение,
называется средним ускорением материальной
точки на участке траектории 1-2 (или за
время
,
за которое происходит это приращение,
называется средним ускорением материальной
точки на участке траектории 1-2 (или за
время![]() ).
).
![]()
![]()

Вектор
![]() ,
равный пределу отношения вектора
приращения скорости ко времени
,
равный пределу отношения вектора
приращения скорости ко времени![]() ,
за которое это приращение произошло,
при стремлении
,
за которое это приращение произошло,
при стремлении![]() к 0, называется ускорением материальной
точки в положении 1 (в момент времениt).
к 0, называется ускорением материальной
точки в положении 1 (в момент времениt).
![]() ,
,
т.е. вектор ускорения равен производной от вектора скорости по времени.
Поскольку сам вектор скорости есть производная от радиус-вектора по времени, то ускорение есть производная второго порядка от радиус-вектора по времени
![]() .
.
![]()

Найдем связь между проекциями
радиус-вектора
![]() ,
вектора скорости
,
вектора скорости![]() и вектора ускорения
и вектора ускорения![]() .
.
С одной стороны, согласно сказанному
выше, вектор ускорения равен
![]() .
.
С другой стороны
![]()
или
![]() .
.
Сравнивая записанные для вектора ускорения выражения, находим, что
![]()
![]()
Модуль вектора
![]() ,
согласно теореме Пифагора, равен
,
согласно теореме Пифагора, равен
![]()