книги из ГПНТБ / Боббер Р.Дж. Гидроакустические измерения
.pdf122 |
Гл. II. Методы и теория |
сопротивлении R. Сам измеритель включает в себя гидрофонный предусилитель, фильтры и другие электронные узлы. Он может содержать также генератор напряжения, подаваемого на R. Отсчет по вольтметру, самописцу, осциллографу или какомулибо другому прибору используется для измерения или наблю дения сигнала на выходе системы, обозначенного е0. Если R мало по сравнению с Z и с входным сопротивлением измери-
/
Р и с. 2.57. Прибор для измерения акустического шума. 1 — генератор Тевенина, замещающий гидрофон; 2 — измеритель (предусилитель, фильтры и т. д.); 3 — калибровочный сигнал.
теля, то отношение e0/eg = e0 /e, = К, где /( — градуировочная по стоянная прибора. Тогда
_£о__ |
(2.108) |
|
eg ~ Мр |
||
|
||
или |
|
|
е0\р = М К . |
(2.109) |
В случае синусоидального звукового давления (2.109) может служить градуировочной формулой, причем е01р — чувствитель ность системы, выраженная через известную чувствительность гидрофона М и постоянную измерителя К-
Если р является среднеквадратичным давлением шума в по лосе частот, то М и К должны быть известны для всей полосы частот, а е02 должно быть пропорционально р2 или полной мощ ности в частотной полосе. Обычные вольтметры, даже если они отградуированы в единицах среднеквадратичного напряжения, не являются измерителями мощности. Объединение (2.107) и (2.109) дает
PSL = 20 lg е0 - 20 lg М/С- 20 lgр0 - 10 lg А/. (2.110)
Используется значение М/С на центральной чистоте полосы про
2.16. Измерения шума |
123 |
пускания. Любое изменение М и К с частотой при этом учиты вается введением эффективной ширины полосы А/. На рис. 2.58показана зависимость (М/С) 2 от частоты. Если по осям исполь зуется линейный масштаб, то площадь под сплошной кривой пропорциональна мощности, проходящей через систему гидро фон—фильтр измерителя. Для нахождения этой площади приме-' няют планиметр или другой графический метод, а затем нахо дят характеристику идеального фильтра, показанную пункти ром, ограничивающим равновеликую площадь. За высоту ха рактеристики пропускания идеального фильтра принимается
Рис. 2.58. Характеристики реального (сплошная кривая) и эквивалентного идеального (пунктирная) фильтров.
значение (М/С) 2 на центральной частоте /о- Идеальная, или эф фективная, ширина полосы равна тогда Af, как показано на рисунке. Выбор центральной частоты f0 довольно произволен. Можно выбирать частоту, на которой (М/С) 2 имеет максимум. Тогда, поскольку произведение (М/С) 2 А/ фиксировано, lOlgAf уменьшается на ту же величину, на какую увеличивается 2 0 lg М/С, и (2.110) не меняется. При этом М/С, ро и А/ в (2.110) из вестны, и PSL определяется выходным напряжением е0 измери теля.
2.16.2. Уровень звукового давления, эквивалентного шуму
Звуковое давление, эквивалентное шуму, — это среднеквад ратичное давление, создаваемое нормально падающей синусои дальной волной, создающей то же самое зыходное напряжение холостого хода, что и собственный электрический шум гидро фона, который измеряется как среднеквадратичное напряжение в полосе 1 Гц. Приравнивая эти два напряжения и разрешая по лученное соотношение относительно р, получаем
P = e nJM, |
(2.111) |
где М — чувствительность гидрофона в свободном поле, а еп — шумовое напряжение. Теоретически еп измеряется почти таким же образом, как напряжение ее электроакустического генератора,.
124 |
Гл. II. Методы и теория |
|
замещающего гидрофон (см. разд. 2.16.1). Из (2.108) |
|
|
|
en= e g= e 0\K. |
(2.112) |
Приведение к полосе 1 Гд дает |
|
|
|
20 lg е„=20 lg е0 —20 lg К —10 lg Д/. |
(2.113) |
Обычно собственный шум электроакустического генератора, не имеющего предусилителя, слишком мал, чтобы его можно было измерить. Это значит, что электрический шум в измери тельной системе или в среде больше, чем шум генератора. Тогда собственный шум вычисляется в предположении, что он имеет тепловое происхождение; это условие записывается в виде
е2„/Д/=4£77?, |
(2.114) |
где k —-постоянная Больцмана, равная |
1,38 • 1 0 ~ 2 3 Дж/К, Т — |
абсолютная температура в градусах Кельвина, R — эквивалент ное последовательное сопротивление преобразователя. Сопро тивление R может зависеть от акустической нагрузки, давления, температуры и т. д. и, следовательно, должно измеряться при определенных окружающих условиях. При температуре 20° С формула (2.114) принимает вид
Объединение (2.111) и (2.115) дает
201g/? = -197,9 + 101g^ + 101gA /-201gA f. (2.116)
Если требуется измерить уровень звукового давления, экви валентного шуму, для гидрофона, включая предусилитель или другие связанные с ним цепи, то применяется методика, описан ная в разд. 2.16.1. При этом предусилитель рассматривается как единое целое с гидрофоном (рис. 2.57), а известное напряже ние ei вводится между предусилителем и остальной частью из мерительной системы. Этот вид измерений встречается с рядом практических трудностей, если и выход предусилителя и вход измерителя имеют общее заземление. Этот случай обсуждается более подробно в разд. 3.6.
,Литература |
|
|
|
|
1. |
Henriquez Т. |
A., Diffraction constants of acoustic transducers, |
J.'Acoust. |
|
2. |
Soc. Am., 36, |
267 (1964). |
Soc. Am., |
|
Bobber |
R. J., Diffraction constants of transducers, J. Acoust. |
|||
|
37, 591 |
(1965). |
|
|
3.Schottky W„ Das Gesetz des Tiefempfangs in der Akustik und Elektroakustik, Z. f. Physik, 36, 689 (1926).
4.Ballantine S., Reciprocity in electromagnetic, mechanical, acoustical and
interconnected systems, Proc. Inst. Rad. Engr., 17, 929 (1929).
,5. MacLean W. R., Absolute measurement of sound without a primary stan-' dard, J. Acoust. Soc. Am., 12, 140 (1940).
Литература |
125 |
6.Cook R. К., Absolute pressure calibration of microphones, J. Acoust Soc Am., 12, 415 (1941).
7.Summary Technical Report of NDRC, Division 6, Vol. 10, Sonar Calibra tion Methods, 1946.
8.McMillan E. M., Violation of the reciprocity theorem in linear passive elec tromechanical systems, J. Acoust. Soc. Am., 18, 344 (1946).
9.Bobber R. J., Darner C. L., A linear passive nonreciprocal transducer, J. Acoust. Soc. Am., 26, 98 (1954).
10. Bobber R. J., A general reciprocity parameter, J. Acoust. Soc. Am 39 680 (1966).
11. Foldy L. L., Primakojf H., General theory of passive linear electroacou
stic transducers and the electroacoustic reciprocity theorem, I, J. Acoust Soc Am., 17, 109 (1945); and Part II, 19, 50 (1947).
12. Carstensen E. L., Self-reciprtfcity calibration of electroacoustic transducers,
J.Acoust. Soc. Am., 19, 961 (1947).
13.Sabin G. A., Transducer calibration by impedance measurements, J. Acoust. Soc. Am., 28, 705 (1956).
14. Patterson R. B., Using the ocean surface as a reflector for |
a self-recipro |
city calibration of a transducer, J. Acoust. Soc. Am., 42, 653 |
(1967). |
15.Bobber R. J., Sabin G. A., Cylindrical wave reciprocity parameter, J. Aco ust. Soc. Am. 32, 923(A) (1960); 33, 446 (1961).
16.Simmons B. D., Crick R. J., Plane wave reciprocity parameter and its
application to calibration of electroacoustic transducers at close distances,
J.Acoust. Soc. Am., 21, 633 (1949).
17.Beatty L. G., Reciprocity calibration in a tube with active-impedance ter mination, 4- Acoust. Soc. Am., 39, 40 (1966).
18.Beatty L. G., Bobber R. J., Phillips D. L., Sonar calibration in a highpressure tube, J. Acoust. Soc. Am., 39, 48 (1966).
19.Sims С. C., Henriquez T. A., Reciprocity calibration of a standard hydro phone at 16,000 psi, J. Acoust. Soc. Am., 36, 1704 (1964).
20.McMahon G. A., Coupler-reciprocity system for hydrophone calibration at high pressure, J. Acoust. Soc. Am., 36, 2311 (1964).
21.Голенков A. H.,' Градуировка инфразвуковых гидрофонов методом вза имности в малой камере с водой. Измерительная техника, № 8, 637 (1959).
22. |
Diestel Н. G., Reciprocity |
calibration of microphones in a |
diffuse sound |
23. |
field, J. Acoust. Soc. Am., |
33, 514 (1961). |
|
Trott W. J., Lide E. N., Two-projector null method for calibration of hydro |
|||
|
phones at low audio and |
infrasonic frequencies, J. Acoust. |
Soc. Am., 27, |
24. |
951 (1955). |
transmitter as a uniformly sensitive instrument |
|
Wente E. C., A condenser |
|||
|
for the absolute measurement of sound intensity, Phys. Rev., |
10, 39 (1917). |
|
25.Wente E. C., The Thermophone, Phys. Rev., 19, 333 (1922).
26.Kaye G. W. C. Acoustical work of the National Physical Laboratory, J.
27. |
Acoust. Soc. Am., 7, 167 (1936). |
|
Glover R., Baumzweiger |
B., A moving coil pistonphone for measurement |
|
28. |
of sound field pressure, J. |
Acoust. Soc. Am., 10, 200 (1939). |
Beranek L. L., Acoustic |
Measurements, John Wiley & Sons, New York, |
|
1949, Sec. 4.4. (Русский перевод: Л. Л. Беранек, Акустические измерения, ИЛ, М„ 1952.)
29.Sims С. С., Bobber R. J., Pressure phone for hydrophone calibrations, J. Acoust. Soc. Am., 31, 1315 (1959).
30.Sims С. C., Hydrophone calibrator, U. S. Navy Underwater Sound Refe
rence Lab. Res. Rep. № 60, 12 April 1962 (AD .279-904); см. также Rapid calibrator for small hydrophones, J. Acoust. Soc. Am., 36, 401 (1964).
31. Schloss F., Strasberg M., Hydrophone calibration in a vibrating column of liquid, J. Acoust. Soc. Am., 34, 958 (1962).
126 |
Гл. II. Методы и теория |
32.Summary Technical Report of NDRC, Division 6, Vol. 11, Sonar Calibra tion Measurements, 1946, p. 42.
33.Olson H. F., Mechano-electronic transducers, J. Acoust. Soc. Am., 19, 307 (1947).
34.Bobber R. I., Electronic hydrophone for calibrations at very low frequencies. J. Acoust. Soc. Am., 26, 1080 (1954).
35.Beatty L. G., The dunking machine method of hydrophone calibration at infrasonic frequencies, U. S. Navy Underwater Sound Reference Lab. Res. Rep. № 35, 1955: [AD 75-330].
36.Голенков A. H., Абсолютная градуировка приемников инфразвукового давления в воздушно-водном резонаторе с гидростатическим возбужде нием, Измерительная техника, № 5, 41—46 (1965), а также доклад К-41, 5-й Международный акустический конгресс, Льеж, Бельгия, сентябрь 1965.
37.Hueter Т. F., Bolt R. Н., Sonics, John Wiley & Sons, New York, 1955, p. 43.
38.Fieldler G., Siemens-Sonotest, U. S. Pat. 2,531,844, Nov. 28, 1950 (manu factured by Siemens-Reiniger Co., Erlangen, FRG).
39.Laufer A. R., Thomas G. L., New method for the calibration of a plane hydrophone, J. Acoust. Soc. Am., 28, 951 (1956).
40.Bauer В. B., A laboratory calibrator for gradient hydrophones, J. Acoust. Soc. Am., 39, 585(L) (1966).
41. Rraus J. D., Antennas, McGraw-Hill Book Co, New York, 1950, Chaps. 2, 3 and 4.
42.Olson H. F., Acoustical Engineering, D. Van Nostrand Co., Princeton, N. J., 1957, Chap. II.
43.Albers V. M., Underwater Acoustics Handbook, Pennsylvania State Univ. Press, 1960, Chap. 11.
44. Stenzel H., Leitfaden zur Berechnung |
von Schallvorgangen, |
Julius Sprin |
ger, Berlin, 1939. English translation |
by A. R. Stickley, Handbook for |
|
the Calculation of Sound Propagation Phenomena, NRL Translation № 130. |
||
45. Summary Technical Report of NDRC, |
Division 6, Vol. 13, |
Magnetostric |
tion Transducers, 1946, Chap. 5. |
|
|
46.Stenzel H., Die akustische Strahlung der rechteckigen Kolbenmetnbran, Acustica, 2, 263 (1952).
47.Molloy С. T Calculation of the directivity index for various types of ra-'
48. |
diators, J. Acoust. Soc. Am., 20, 387 (1948). |
Wandler, Elektrotechn. |
|
Spandock F., Grenzen der |
Giite elektroakustischer |
||
49. |
Z„ A76, 598 (1955). |
(slide rule), Edo Corporation, College Point, |
|
Sonar Transducer Computer |
|||
|
L. I., New York; Sonar Performance Calculator |
(slide rule),’ Raytheon |
|
|
Company, Submarine Signal Division, Portsmouth, R. |
I. |
|
50.Summary Technical Report of NDRC, Division 6, Vol. 10, Sonar Calibra tion Methods, 1946, Chap. 4.
51.Kendig P. M., Mueser R. E., A simplified method for determining trans ducer directivity index, J. Acoust. Soc. Am., 19, 691 (1947).
52.Резников A. E., Снытко А. Я-, К вопросу об измерении коэффициента осевой концентрации ультразвукового излучателя. Измерительная тех
53. |
ника, № 7, 654 (июль 1965). |
John Wiley & Sons, New York, 1954/ |
|
Hunt F. V., Electroacoustics, |
|||
54. |
Fischer F. A., Grundzflge der |
Elektroakustik, Fachverlag Schiele & Schon, |
|
|
W. Berlin, 1950; English translation by S. Ehrlich and F. Pordes, Funda |
||
55. |
mentals of Electroacoustics, Intersci. Publ., New York, 1955. |
|
|
Summary Technical Report of NDRC, Division 6, Vol. 13, Magnetostriction |
|||
56. |
Transducers, 1946, Chaps. 2, 3. |
Kinsler L. E., Investigations |
and application |
Brud W. L., Donnelly J. D., |
|||
|
of reverberation measurements |
of acoustic power in water, |
J. Acoust. Soc. |
|
Am., 35, 1621 (1963). |
|
|
ОСНОВЫ ИЗМЕРЕНИЙ В СВОБОДНОМ ПОЛЕ
3.1. ВВЕДЕНИЕ
Большинство подводных электроакустических измерений от носится к измерениям в дальней зоне свободного поля. Почти все остальные методы, описанные в гл. II, являются специаль ными и не находят такого широкого использования, как изме рения в свободном поле. Практически каждая лаборатория, за нимающаяся подводными исследованиями и разработками, имеет оборудование для измерений в свободном поле; это же отно сится ко многим морским лабораториям и к некоторым универ ситетам. Соответствующее оборудование обычно имеет значи тельные размеры, так как измерения в дальней зоне свободного поля нельзя провести на лабораторном столе, за исключением, возможно, высоких ультразвуковых частот. Оборудование обычно далеко не идеально соответствует условиям измерений, требуемым теорией; поэтому весьма важное значение приобре тает правильная процедура измерений в свободном поле.
Теория электроакустических измерений в дальней зоне сво бодного поля предъявляет к процедуре измерений немного тре бований. Все, что необходимо, это: 1) свободное поле, 2) доста точно большое расстояние излучатель—гидрофон, чтобы удов летворить критериям свободного поля, 3) приборы, измеряющие силу тока или напряжение на входе и выходное напряжение хо лостого хода, и 4) известные значения некоторых параметров, например расстояния, плотности воды и частоты. Эти параметры легко определить, а кажущаяся простота трех первых требова ний обманчива. В частности, требование свободного поля яв ляется большой и сложной проблемой. Истинное свободное поле, или однородная безграничная среда, конечно, лишь идеа лизированное понятие. Основное количество практических труд
ностей в подводных электроакустических |
измерениях |
связано |
с получением приемлемого приближения |
к условиям |
свобод |
ного поля.
Эти теоретические требования, а также соображения удоб ства и экономии привели к разработке различных процедур из мерений, рассматриваемых в следующих разделах. Детали про цедуры измерений сильно меняются от места к месту и, конечно, меняются со временем. Большая часть вопросов, обсуждаемых
128 |
Гл. III. Основы измерений в свободном поле |
в этой главе, имеет первостепенное значение для практики из мерений, хотя не все они в одинаковой степени применимы к конкретным измерительным задачам.
3.2. ЕСТЕСТВЕННЫЕ ВОДОЕМЫ И ИСПОЛЬЗУЕМОЕ В НИХ ОБОРУДОВАНИЕ
Для измерений в условиях свободного поля используют раз личные естественные водоемы — озера, пруды, большие родники, реки, затопленные карьеры, океанские заливы, — а кроме того, такие водоемы, как искусственные пруды и лабораторные бас сейны, но для их использования необходим импульсный режим работы, и они рассматриваются отдельно в разд. 3.12. Основные требования к естественным водоемам состоят в следующем: 1) достаточно большие размеры, чтобы интерференцию, обус ловленную отражениями от поверхности, можно было устранить путем использования импульсного режима, применения погло щающих покрытий или за счет затухания при распространении на большие расстояния, 2) низкий уровень окружающего шума и 3) водная среда должна быть относительно свободна от всего, что может вызвать преломление или рассеяние звука (те чений, градиентов температуры, морских организмов, пузырей и загрязнителей). Для обеспечения низкого уровня окружающего шума, стабильности платформы и удобств проведения измере ний желательна защита от ненастной погоды.
Вспомогательные платформы, используемые при измерениях, бывают разные: пирсы, мосты, баржи или другие полуподвижные плавающие сооружения, а также лодки и корабли. Пирсы и мосты обеспечивают наилучшие удобства и стабильность усло вий работы. Если же водоем большой и глубокий, нужно исполь зовать плавучую конструкцию, а стабильность и удобства обеспе чиваются вертикальным . размером конструкции и коммуника циями, проходящими под водой или идущими к берегу.
Критическим размером естественных водоемов является глу бина, так как обычно она меньше горизонтальных размеров, а также потому, что поверхность раздела вода—воздух и дно являются основными отражающими поверхностями. Боковые границы естественных водоемов обычно находятся на значитель ных расстояниях и имеют наклоны, образуя вместе с поверх ностью раздела вода—воздух естественные клинообразные ло вушки для звука, в которых звуковые лучи, распространяю щиеся почти горизонтально, многократно отражаются между дном и поверхностью, отдавая при каждом отражении часть энергии в воздух или в грунт.
Песок, ил или грязь на дне частично поглощают звук при условии, что в них не содержится распадающегося органического вещества. Однако если на дне имеются разлагающиеся органи
3.2. Естественные водоемы и оборудование |
129 |
ческие вещества, то постоянно образуются пузырьки газа (обычно метана). При этом на дне создается поверхность раздела вода— газ, являющаяся хорошим отражателем [1, 2]. В том случае, когда и дно и поверхность являются хорошими отражателями, интерференция усиливается более чем вдвое по сравнению с от ражениями только от поверхности. Между этими двумя поверх ностями, которые обычно приблизительно параллельны, проис ходят многократные отражения, — иными словами, между дном и поверхностью устанавливаются стоячие волны. Амплитуда ре зультирующих интерференционных экстремумов может быть во много раз больше, чем в случаях интерференции при одной от ражающей поверхности [3]. Вогнутое дно может привести к фо кусировке отражений, и, следовательно, к очень сильной интер ференции.
Простого критерия для определения минимальной приемлемой глубины для проведения измерений в водоеме не имеется. Тре буемая глубина зависит от типа преобразователя, вида и точ ности измерений, от частотного диапазона и режима работы: импульсного или непрерывного. Однако опыт работы ряда гидро акустических лабораторий на разных полигонах позволяет сде лать несколько выводов общего характера.
Малые глубины, до 6 м, используются в основном для ульт развукового диапазона частот. При измерениях в верхней части диапазона звуковых частот и в нижней части ультразвукового диапазона типичными являются глубины 7,5—15 м. Для частот ниже 1 кГц такие глубины являются минимально допустимыми. Если измеряются характеристики широкополосных преобразова телей с приблизительно постоянной чувствительностью, то отра жения от границ можно обнаружить и ввести необходимые по правки. Преобразователи, имеющие резонансы на частотах ниже 1 кГц, нужно градуировать в более глубоком водоеме, где можно обеспечить глубину погружения преобразователя порядка 15 м и более.
Если преобразователь погружен недостаточно глубоко, могут возникнуть трудности, связанные с присутствием рыб. Заполнен ные газом плавательные пузыри, имеющиеся у многих рыб, дей ствуют как газовые пузырьки, резонирующие на частотах зву кового диапазона.
Источниками фонового шума служат лодки и корабли, рас положенные неподалеку от водоема промышленные установки (особенно связанные с водой насосы), грузовой транспорт, же лезные дороги, дождь и волны. Как ни странно, но большие самолеты тоже являются источником интерференционного шума из-за его высокого уровня в этом случае. Даже при ослаблении на 30 дБ на границе воздух—вода шум самолета может создать достаточно высокий уровень шума в воде.
9 З а к а з № 730
130 |
Гл. III. Основы измерений в свободном поле |
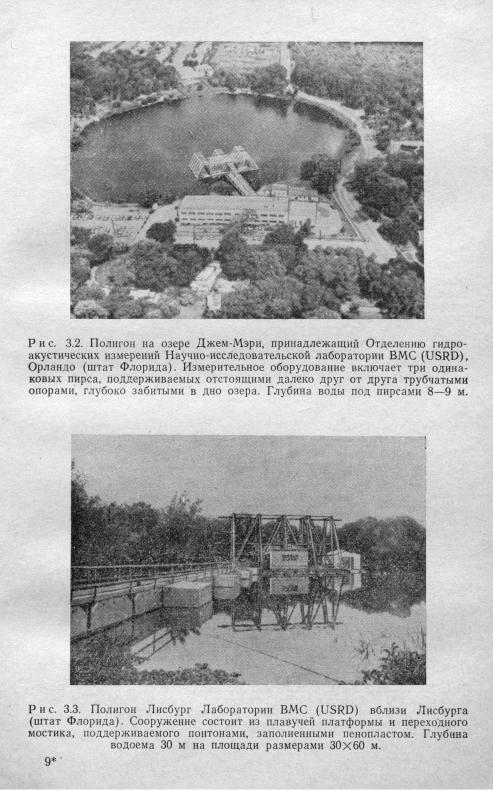
Температурные градиенты в месте расположения преобразо вателя или поблизости от него тоже создают помехи при граду ировке. Звуковые лучи преломляются из-за них и, конечно, могут привести к ошибкам в измерениях. На рис. 3.1 показаны некоторые температурные разрезы, или термоклины, для озера Джем-Мэри в Орландо (штат Флорида), полученные до того, как были при няты меры для устранения градиентов. Некоторые виды рыб,
Рис. 3.1. Типичные термоклины в озере Джем-Мэри, Орландо (штат Фло рида). Средняя глубина озера вблизи места расположения измерительного оборудования равна 8—9 м.
вероятно, предпочитают определенную температуру воды, что ведет к концентрации рыбы на определенных глубинах. Темпе ратурные градиенты в малых спокойных водоемах выше всего вблизи поверхности и в теплую погоду. В глубоких озерах влия ние градиента при электроакустических измерениях становится пренебрежимо малым на глубинах порядка 15—30 м. Состояние
без градиентов, наиболее близкое к изотермическому, обычно бы вает весной. Небольшие озера и пруды можно сделать изотер мическими с помощью принудительной вертикальной циркуля ции воды. На полигоне Додж-Понд, принадлежащем Гидроаку стической лаборатории ВМ.С в Нью-Лондоне (штат Коннек тикут), для этой цели используется мощный насос низ кого давления. На озере Джем-Мэри в Орландо (штат Фло рида) вблизи дна под тем .участком озера, где проводятся