книги из ГПНТБ / Радиотехнические системы в ракетной технике
..pdf(рис. 2.9). Разреженное размещение вибраторов на излучающей стороне решетки выбрано из расчета амплитудного распределения Тейлора для получения уровня боковых лепестков около 34 дб.
Линза TACOL, управляемая от ЭВМ, обеспечивает сканирова ние луча и трансформацию сферического фронта волны в плоский. Это приводит к статистическому сглаживанию периодической функции фазовых ошибок фазовращателей, вызванных дискрет ностью, и к уменьшению максимального уровня боковых лепе
стков.
5
Рис. 2.9. К принципу действия РЛС «Хапдар»:
а — принцип построения |
разреженной апертуры; б — принцип |
построения линзы |
|
с управлением от ЭВМ; |
I — рупор |
облучения; 2 — приемные вибраторы; 3 —■излу |
|
чающие вибраторы; 4 — дискретные |
фазовращатели с нелинейным законом прира |
||
|
щения по |
апертуре; 5 — линза |
|
Пятирупорный облучатель обеспечивает получение независимых |
|||
амплитудных распределений |
(со спадом к краям |
апертуры для |
|
суммарного и разностного каналов) с низким уровнем боковых ле пестков. Коллекторные элементы линзы, выполненные печатным способом, представляют собой полуволновые диполи с трехэле ментными фазовращателями, за каждым из которых устанавли вается возбуждающий элемент рупора излучения.
Фазовращатель имеет следующие характеристики: вносимые потери 1,2 дб; среднеквадратическая ошибка установки фазы 6°; допустимая импульсная мощность 2 квт (средняя — 20 вт). Пло скость антенной решетки отклонена от вертикали на 30°, коэффи циент направленного действия антенны 39,5 дб, 'потери в антенне
3,6 дб.
Уровень боковых лепестков, равный в среднем —-40 дб, дости гает максимального значения —28 дб. Диаметр рабочей части лин зы и фокусное расстояние равны между собой. Антенная решетка имеет 4300 элементов (2165 активных) с 2165 трехэлементными фазовращателями. Элементы решетки установлены в вершинах равностороннего треугольника со стороной 0,676 X.
РЛС «Хапдар» может обнаружить, захватить и сопровождать
60
Зевс». В связи с переходом на огневой комплекс «Найк-Икс» ЗАР не пошла в серийное производство и в настоящее время выполняет функции полигонного радиолокатора. Проектная дальность дей ствия РЛС 1000—1600 км. В РЛС используются разнесенные на 300 м антенны для приема и передачи. Передающая антенна, со стоящая из трех плоских решеток длиной около 24 м, расположен ных треугольником, вращается по азимуту вкруговую со скоро стью 10 об/мин. В РЛС используется метод сжатия импульсов
«Chirp».
РЛС ЗАР является первой полностью автоматизированной станцией определения траектории цели. Основные режимы работы РЛС — обнаружение и слежение. Слежение за целью осуще ствляется путем точного направления луча антенны на цель и удержания ее в этом луче. Более сложным представляется сопро вождение цели «на проходе», т. е. слежение за объектом в про цессе сканирования. Метод сопровождения цели «на проходе» пред полагает непрерывное сканирование заданного участка про странства и фиксацию координат всех обнаруженных при этом объектов. Информация о координатах, получаемая при каждом цикле сканирования, записывается в запоминающее устройство и затем анализируется для определения степени корреляции с дан ными, получаемыми при последующих циклах сканирования.
Работа РЛС может быть разделена на четыре этапа:
—обнаружение цели;
—сортировка полученных сообщений;
■— определение корреляции между координатами полученных радиолокационных отметок;
— обработка данных о траектории цели.
На первом этапе проводятся фильтрация шумов и выделение действительных отраженных сигналов, представляющих «сообще ния о целях», т. е. информацию о текущих координатах всех обна руженных объектов. Эта задача возникает в результате того, что с аналого-цифрового преобразователя, стоящего на выходе прием ного устройства РЛС, унимается большое количество шумовых импульсов. Амплитуда таких импульсов колеблется в широких диапазонах, так что в течение секунды появляется много шумовых выбросов, превышающих по интенсивности минимальный уровень сигналов. Скорость сканирования и частота следования зондирую щих импульсов РЛС ЗАР позволяют принимать за один цикл ска нирования 4—5 импульсов, отраженных от каждого объекта. За
это время в приемнике возникает около |
10 000 шумовых импуль |
сов, маскирующих полезные сигналы. |
сигналы селектируются |
В блоке обнаружения цели полезные |
путем применения методов интегрирования и фильтрации дискрет ных шумов. Интегрирование заключается в накоплении отражен ных радиолокационных сигнатов, принятых за время одного пе риода сканирования. Поскольку шумовые импульсы возникают случайно, то появление их на одной дальности в нескольких цик лах временной развертки маловероятно. Интегрирование импуль
62
сов является эффективным средством селекции сигналов, хотя и усложняет общую схему РЛС. Усложнение обусловлено наличием в РЛС более 200 отдельных приемников, работу которых трудно разделить по времени для использования одного интегрирующего устройства. Поэтому необходимо каждый приемник дополнять своей интегрирующей схемой. Для того чтобы можно было менять частоту следования импульсов в процессе работы, в РЛС исполь зуются методы дискретной обработки сигналов. Для каждого ра диолокационного сигнала и шумового всплеска аналого-цифровой преобразователь вырабатывает дискретные значения дальности, азимута, угла места и времени приема.
На втором этапе работы РЛС данные сортируются на две груп пы. В первую группу попадают сообщения о целях, согласующиеся
сранее рассчитанными траекториями. Такие сообщения поступают
вустройство обработки данных. Сообщения второй группы, не со гласующиеся с ранее рассчитанными траекториями, подаются в корреляционное устройство. Время сортировки сообщений нахо дится в квадратичной зависимости от числа рассчитанных траек торий. При достаточно большом количестве последних для сорти ровки требуется значительное время, что снижает быстродействие РЛС. Для устранения этого ограничения в РЛС ЗАР применяется специальное запоминающее устройство, регистрирующее и воспро изводящее данные о траекториях в зависимости от их дальности. Сообщения сортируются на основе их сравнения не со всеми рас считанными траекториями, а лишь с теми, которые близки им по дальности.
Третий этап работы Р Л С — определение корреляции получен ных данных — осуществляется в корреляционном устройстве, пред ставляющем собой специальную ЭВМ. Коррелированными счита ются те сообщения, координаты которых не выходят за допусти мые пределы при сравнении данных в четырех последовательных циклах сканирования. Так ГЧ, летящая со скоростью 6,4 км/сек, переместится за время одного 4-секундного цикла на 25,6 км, и эта цифра считается предельной при определении корреляции. Если среди четырех последовательных сообщений найдутся три с коор динатами, лежащими на одной прямой, и с разносом, не превы шающим указанные пределы, то эти сообщения считаются принад лежащими к одному объекту, и информация о его траектории пе редается в устройство обработки данных, после чего начинается четвертый этап работы РЛС, характеризуемый расчетом коорди нат обнаруженных объектов для последующих циклов сканиро вания.
На рис. 2.11 представлены результаты построения траектории ИСЗ по 600 радиолокационным отметкам, выделенным в течение 200 сек из 6 млн. шумовых отметок. На рис. 2.11а на участке тра ектории с 36-й по 44-ю сек шумы маскируют полезные сигналы. На рис. 2.116 представлены результаты обработки сообщений, полу ченные после прохождения через противошумовой фильтр (начи нает намечаться траектория, хотя еще имеется много ложных от-
63
меток, возникших в результате совпадения случайных шумовых импульсов). По истечении 200 сек наблюдения (рис. 2.11 в) после прохождения через дискретный противошумовой фильтр траекто рия уже достаточно отчетлива. После прохождения сигналов через устройство обработки данных (рис. 2.11 г) остались одни действи тельные сообщения.
Время, сек |
Время, сек |
а |
5 |
Рис. 2.11. Результаты |
эксперимента |
по |
наблюдению |
за |
ИСЗ |
с |
помощью |
|||||
|
|
|
РЛС ЗАР: |
|
|
|
|
|
|
|
||
а — радиолокационные отметки |
и шумы до |
прохождения |
через |
фильтр; б — радиолокаци |
||||||||
онные отметки в шумах, оставшихся |
после |
прохождения |
фильтра; в —в результате |
наблю* |
||||||||
дения за ИСЗ в течение |
200 сек с использованием противошумового |
дискретного фильтра; |
||||||||||
г — траектория |
ИСЗ |
после окончательной обработки |
данных в |
РЛС |
|
|||||||
РЛС «Рампарт» была |
разработана |
для |
опознавания |
бал |
||||||||
листических объектов |
на |
основе |
анализа |
их |
входа |
в |
атмосфе |
|||||
ру. РЛС сооружена на полигоне Уайт-Сандс и распознает ГЧ на фоне ложных целей на дальностях до 1600 км. РЛС оборудована аппаратурой сжатия импульсов и имеет передающее устройство из двух параллельно включенных передатчиков общей мощностью 24 Мвт. Передатчики работают в моноимпульоном режиме на одну чашеобразную антенну диаметром 18 м. Антенна (рис. 2.12) фор
мирует узкий луч «карандашного» типа с помощью четырех рупор ных облучателей.
Направление полета дели определяется фазометрическим спо собом. ЭВМ РЛС позволяет обрабатывать 100 отраженных сигна лов в секунду. РЛС способна сопровождать одновременно несколь
ко целей.
Оконечные каскады передатчиков РЛС выполнены на амплитронах с выходной мощностью 3 Мвт. Излучаемый импульс состоит
из десяти импульсов по 1 мксек |
|
|
|||||||
каждый, |
разнесенных по |
часто |
|
|
|||||
те на |
1 Мгц. |
Коэффициент |
сжа |
|
|
||||
тия — 10. |
|
|
|
|
|
|
|
||
РЛС АЛТАЙР сооружена на |
|
|
|||||||
острове |
Рой-Наму с целью |
рас |
|
|
|||||
ширения |
исследований |
физиче |
|
|
|||||
ских явлений, |
возникающих |
при |
|
|
|||||
входе головных частей в атмосфе |
|
|
|||||||
ру. Полученные данные преду |
|
|
|||||||
сматривается |
использовать |
для |
|
|
|||||
отработки методики |
распознава |
|
|
||||||
ния ГЧ среди ложных целей. |
|
|
|||||||
Предполагается, что РЛС ра |
|
|
|||||||
ботает в широком диапазоне ча |
|
|
|||||||
стот (помимо частот 60, 425 и |
|
|
|||||||
1320 Мгц, может быть еще не |
|
|
|||||||
сколько |
рабочих |
частот) |
и |
смо |
|
|
|||
жет |
определять |
конфигурацию |
|
|
|||||
целей и их скорость. |
|
|
|
|
|
||||
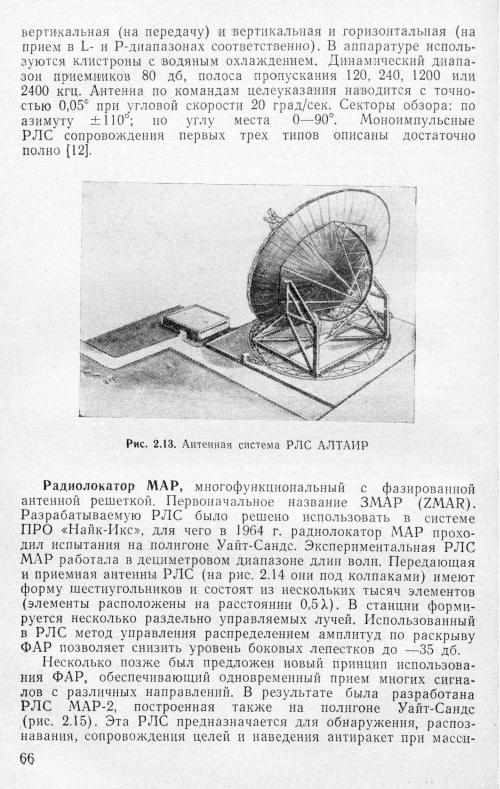
Антенна РЛС |
(рис. 2.13) пред |
|
|
||||||
ставляет |
собой |
параболический |
|
|
|||||
рефлектор диаметром 45 |
м. Пре Рис. |
2.12. |
Антенная система РЛС |
||||||
делы движения антенны |
по ази |
|
«Рампарт» |
||||||
муту |
±200°, по углу |
места — 0— |
рупорными облучателями |
||||||
90°. Антенна моноимпульсная с пятью |
|||||||||
(один суммирующий) |
работает с сигналами |
различных видов по |
|||||||
ляризации: линейной |
(вертикальной и горизонтальной) и круго |
||||||||
вой (с различным направлением вращения).
РЛС «Амрад» разрабатывалась для слежения за входом ГЧ в атмосферу. РЛС достаточно точно измеряет ЭПР и скорости вхождения ГЧ в атмосферу (полигон Уайт-Сандс) в диапазоне метровых и дециметровых волн. Антенна высотой 18,3 м форми рует диаграмму направленности «карандашного» типа. Импульс ная мощность РЛС 10 Мвт, средняя излучаемая мощность 750 квт, ширина диаграммы направленности антенны менее 0,5°.
Другими (стандартными) измерительными полигонными РЛС являются: AN/FPS-16, AN/FPQ-6, AN/TPQ-18, AN/FPA-22, AN/FPA-23. Две последние станции построены на полигоне УайтСандс. Каждая из них имеет по два передатчика с импульсной мощностью 30 Мвт и по четыре приемника. Поляризация сигнала
65
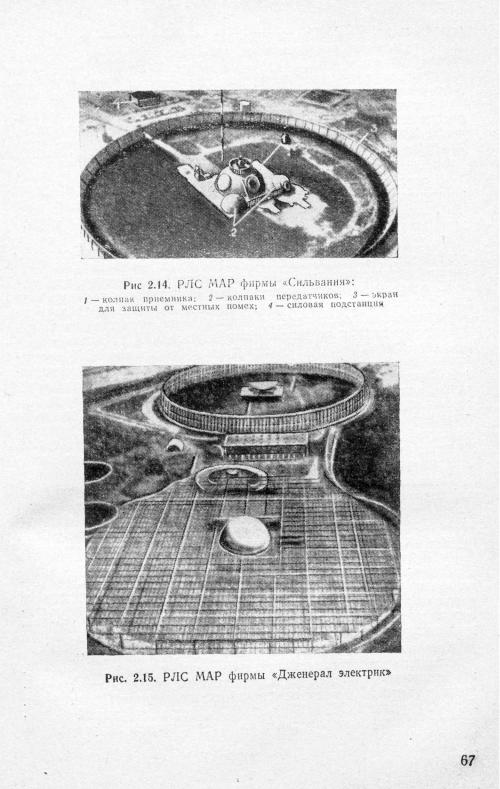
рованном налете МБР, оснащенных средствами прорыва ПРО. РЛС использует раздельные на прием и передачу ФАР и рабо тает в диапазоне частот 1000—2000 Мгц. В других источниках указывается несколько иной диапазон частот: 390—1556 Мгц.
Впередающем устройстве применяется 20 000 мощных ЛБВ. Упрощенный вариант РЛС МАР — ТАКМАР, сооружаемый на
атолле Кваджелейн, предназначен для выполнения тех же задач, что и МАР, но при меньшем количестве сопровождаемых целей. РЛС ТАКМАР имеет меньшую мощность и меньший коэффициент усиления антенны по сравнению с РЛС МАР.
В последнее время стало известно о разработке РЛС КАМАР, прототипом которой послужила РЛС ТАКМАР. В основу этой РЛС положен новый принцип конструирования ФАР — совмещен ные приемопередающие решетки.
РЛС МАР может вести постоянный обзор воздушно-космиче ского пространства для обнаружения целей аналогично РЛС ПАР. После обнаружения цели ЭВМ определяет ее характер, для чего РЛС длительное время следит за целью и вычисляет ее траекто рию. Слежение ведется без прекращения наблюдения за воздуш но-космическим пространством. При наличии большого числа це лей проводится их селекция. Если число целей превышает про пускную способность системы вторичной обработки, ЭВМ обеспе чивает очередность обработки данных и времени облучения це лей. При поиске ЭВМ обеспечивает управление элементами ан тенной системы РЛС с тем, чтобы создать широкий луч для бы строго обзора сектора наблюдения и узкие остронаправленные лучи для селекции баллистических целей. Во время поиска по команде ЭВМ генерируются длинные импульсы, а во время сле жения и распознавания — более короткие для обеспечения высо кой разрешающей способности по дальности.
В системе обработки данных предусмотрены расчет траекто рий перехвата для АР «Спартан» и «Спринт» и передача команд управления на антиракеты. Каждый огневой комплекс системы «Найк-Икс» должен был иметь определенное количество устройств обработки данных в зависимости от типа РЛС и количества АР «Спартан» и «Спринт».
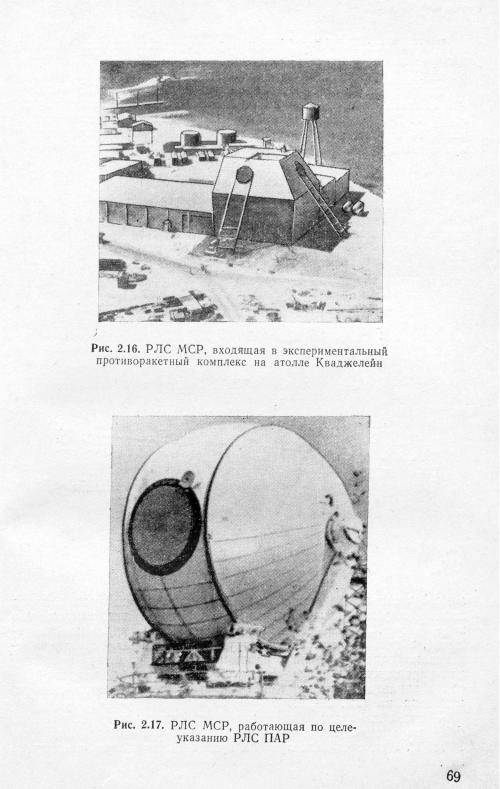
Радиолокатор МСР. Радиолокационная станция МСР пред назначена для наведения антиракет, сопровождения и распозна вания баллистических целей. Она представляет собой импульснодопплеровскую станцию диапазона S, работающую в моноимпульсном режиме. Дальность действия около 1300 км.
Сооружения РЛС МСР занимают участок 900X1300 м. Антенное устройство станции представляет собой пирамидаль
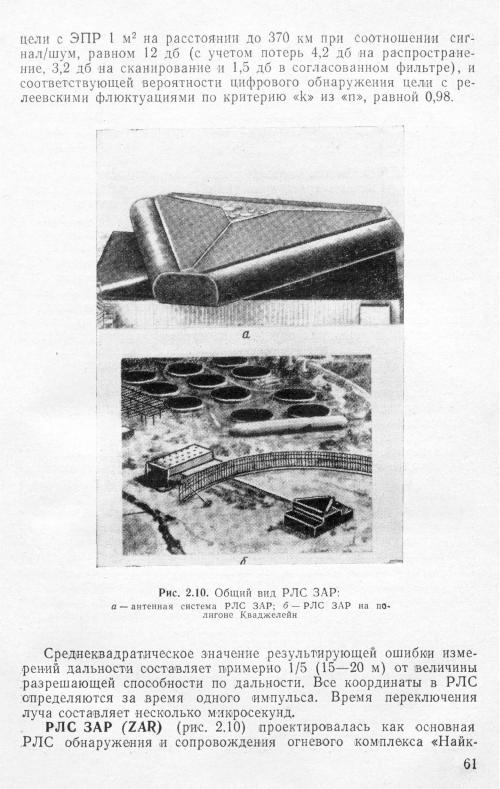
ное сооружение высотой 40 м, содержащее четыре приемопере дающие плоские фазированные антенные решетки (рис. 2.16). Другой вариант РЛС МСР (рис. 2.17) содержит только одну ан тенную решетку, которая способна поворачиваться по углу места и азимуту.
68