книги из ГПНТБ / Радиотехнические системы в ракетной технике
..pdfложение 1) на мощных клистронах с водяным охлаждением. Одна из РЛС, установленная в северной части полигона, имеет 9-метро вую параболическую антенну, другая, расположенная в южной ча сти полигона,— антенну диаметром 25 м. Имеются сведения, что эта РЛС в настоящее время перестраивается из L-диапазона в метровый диапазон.
Данные измерений ЭПР объектов, входящих в атмосферу, на капливаются с целью создания каталога «радиолокационных об разцов». При этом необходимо отметить, что в индикаторных уст ройствах перечисленных станций фиксируются не просто отметки целей, а амплитуды отраженных от цели сигналов, что .позволяет получать наиболее полные данные о конфигурации целей.
2.4. Австралийский полигон Вумера
Решение о строительстве полигона принято правительствами Англии и Австралии еще в 1946 г. с целью .испытаний систем ра кетного вооружения.
Стартовые позиции ракет (рис. 2.2) были построены в районе деревни Вумера. Основной центр полигона расположен в районе городов Солсбери и Аделаида в 480 км от стартовых позиций. Про тяженность трассы полигона составляет 2000 км (трасса проходит над малонаселенными районами страны).
Ввиду благоприятных метеорологических условий (до 330 ясных дней в году) на полигоне в качестве основных измерительных средств приняты оптические. Из радиотехнических средств на по лигоне применяются несколько РЛС AN/FPS-16, размещенных в районе Вумера, РЛС AN/TPQ-18 в конце испытательной трассы и система для передачи и приема информации о ракетах и спут никах.
В 1968 г. на полигоне проводились работы по сигнальной се лекции ГЧ МБР в метровом диапазоне длин волн. Полученные результаты засекречены, однако сообщалось, что «испытания сле дует считать успешными». Применявшиеся при этом сверхмощные когерентные РЛС «Dazzle» и «Sparta» использовали для селекции ГЧ информацию об изменении фазы отраженного сигнала.
2.5. Восточный испытательный полигон
Восточный испытательный полигон (полуостров Флорида), соз данный в 1950 г., является основным центром США по испытаниям МБР и управляемых снарядов.
В состав полигона входят авиабаза Патрик, являющаяся науч но-административным центром, и база на мысе Кеннеди, где нахо дятся основные стартовые позиции, оборудование для запуска МБР и аппаратура для слежения за ракетами на начальном уча стке их траектории.
На полигоне проводились испытания МБР «Атлас», «Титан», «Минитмен», «Юпитер», «Тор», «Поларис», «Посейдон». Основные
50
измерительные средства полигона располагаются в пунктах
1 —12 (рис. 2.4).
На каждом пункте наблюдения имеются по две РЛС сопро вождения AN/FPS-16, радиотелеметрическая станция, оптические и инфракрасные локаторы для слежения за МБР. Радиотехниче ские и оптические средства работают как в импульсном, так и в непрерывном режимах.
Рис. |
2.4. Схема Восточного |
испытательного поли |
|||
|
|
|
гона: |
|
|
/ — мыс Кеннеди; |
2 — мыс Юпитер; острова: |
3 — Боль |
|||
шая |
Багама; |
4 — Эльютера; |
5 — Сан-Сальвадор; 6 — |
||
Мая |
Гуана,- |
7 — Гранд-Теркс; |
8 — Гаити; 9 — Мэйгуэй; |
||
10 — Санта-Люсия; |
/ / — Фернанду-ди-Норонья; |
12 — Воз |
|||
|
несения; |
х корабли наблюдения |
|
||
Радиотехнические системы Восточного испытательного полиго на имеют:
—систему измерения параметров траектории и скорости МБР на активном участке, систему определения ожидаемой точки па дения ГЧ, ложных целей и т. д. (система имеет вычислительные машины !и планшет-индикатор, на котором прочерчиваются трассы полета ГЧ, ЛЦ, корпуса М БР);
—систему SECOR для измерения параметров траектории го ловной части МБР на внеатмосферном участке ее полета;
—системы DOVAP, DOPLOC, определяющие параметры тра
ектории ГЧ, ЛЦ и скорости их -полета;
3* |
51 |
— систему ELSSE для измерения параметров траектории МБР по сигналам бортового радиотелеметрического передатчика и
сравнения их с расчетными;
— систему ARCAS для сопровождения МБР (содержит шесть РЛС и вычислительные устройства, расположенные на авиабазе Патрик, мысе Кеннеди, островах Большая Багама, Сан-Сальвадор, Пуэрто-Рико и Антигуа);
—РЛС AN/FPS-16 слежения за ИСЗ и измерения параметров траектории МБР (локаторы размещены на авиабазе Патрик, мысе Кеннеди, островах Большая Багама и Сан-Сальвадор);
—РЛС AN/FPS-18 (подвижный вариант AN/FPQ-6), пред
назначенные для сопровождения ГЧ, ЛЦ, корпусов МБР (дисло цируются в районе мыса Кеннеди, на авиабазе Патрик, на остро вах Большая Багама, Гранд-Теркс, Вознесения, Антигуа);
—РЛС MPQ-12 (модифицированный вариант РЛС SCR-584), работающую по пассивным целям (установлена на мысе Кеннеди);
—систему MISTRAM для точного измерения координат и ско рости МБР и ИСЗ по сигналам радиомаяка (дислоцируется в рай оне мыса Кеннеди и на островах Большая Багама);
—систему STAR, контролирующую водное пространство с
целью определения мест падения головных частей и ступеней МБР (размещена на кораблях). Принцип работы системы основан на акустической пеленгации взрывов зарядов, размещенных на ГЧ и в корпусе МБР. Эта система позволяет определять точки падения ГЧ в радиусе нескольких сот километров от корабля с точностью до нескольких километров.
В состав каждой станции системы ARCAS входит РЛС сопро вождения AN/FPQ-6. Целеуказание и команда на включение станции выдаются с вычислительного центра. Непрерывный авто матический контроль работы РЛС позволяет оперативно опреде лять ошибочные показания любой станции с целью исключения ее из измерительного комплекса.
Для обеспечения измерений при запусках МБР по всей трассе полигона необходимо располагать свыше десяти кораблей, обору дованных РЛС AN/FPQ-4, обзорными локаторами SPN-8, радиотелеметрическими станциями и аппаратурой для определения свое го местоположения с точностью 10—15 м. Радиус действия аппара туры каждого судна около 1000 км. Данные о траектории МБР, полученные с .помощью РЛС AN/FPQ-4, сначала должны переда ваться на самолет, а с него на мыс Кеннеди. РЛС SPN-8 исполь зуются также для определения мест падения ГЧ, корпусов МБР и ступеней ракет-носителей ИСЗ.
Телеметрическое оборудование полигона имеет более 175 на земных радиотелеметрических станций, размещаемых на расстоя ниях примерно 500 км. В 1966 г. на полигоне сооружен крупный наземный телеметрический комплекс для слежения и сбора данных при запусках МБР и ИСЗ, имеющий в своем составе РЛС типа
AN/FPA-22 и AN/FPA-23.
На полигоне также пришлось установить большое количество
. 52
специальной оптической аппаратуры для съемки процессов схода МБР со стартового стола, разделения ступеней, отделения ГЧ, от стрела средств преодоления системы ПРО.
Для испытаний кассетных ГЧ типа МИРВ (MIRV) полигон мо дернизируется. Предусматривается: установка на кораблях аппа ратуры для записи радиолокационных характеристик ГЧ типа МИРВ; установка РЛС слежения, работающих на одном из участ ков диапазона 3900—6200 Мгц; оснащение кораблей когерентными РЛС дециметрового диапазона для сбора данных о возмущениях атмосферы (спутных следах), сопровождающих полет головных частей.
Для подводной локации мест падения ГЧ необходима также модернизация системы гидроакустических станций, расположенных на трассе полигона. С 1972 г. Восточный полигон намечено обору довать дополнительно тремя системами определения траектории полета испытываемых объектов. Одна из них должна использовать импульсную РЛС большой мощности, следящую одновременно за несколькими объектами от точки старта и до точки падения. Вто рая система с сетью РЛС непрерывного излучения должна опреде лять характеристики объектов с автономными системами наве дения. Третья система должна иметь лазерное дальномерное уст ройство определения траектории полета ракеты сразу после ее за пуска.
|
2.6. Полигонные РЛС |
|
|
РЛС AN/FPS-85 |
с антенной системой из фазированных |
||
решеток (ФАР) с |
электронным сканированием |
луча. |
Антенна |
90-элементная, работает в диапазоне дециметровых волн. |
Исполь |
||
зование ФАР привело к созданию РЛС «Езар» |
(ESAR), |
Испыта |
|
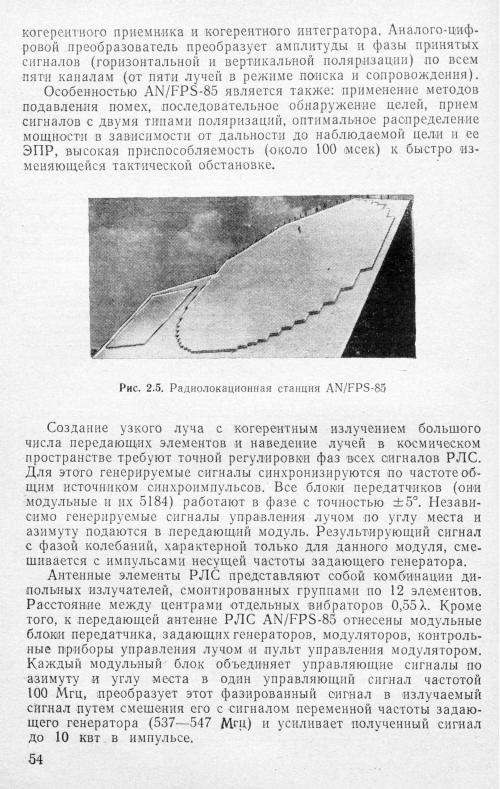
ния РЛС «Езар» показали возможность автоматического управле ния работой РЛС с помощью ЭВМ и легли в основу эксперимен тальной станции большой мощности AN/FPS-85 (рис. 2.5), соору женной на авиабазе Эглин к 1965 г., но впоследствии уничтожен ной пожаром. В 1968 г. был сооружен рабочий образец РЛС. Ан тенная система РЛС AN/FPS-85 ориентирована в южном направ лении, что позволяет обнаруживать и сопровождать космические объекты, движущиеся по очень высоким орбитам, с высокой сте пенью вероятности. Считается, что РЛС имеет возможность обна руживать и сопровождать БРСД, запускаемые с подводных лодок, МБР, ложные цели и осколки корпусов ракет.
Многофункциональность РЛС определяется высокой скоростью перемещения луча (время переключения элементов ФАР несколько микросекунд).
Конструктивной особенностью РЛС является наличие когерент ного устройства обработки данных. Оно предназначено для обеспе чения достаточной разрешающей способности по допплеровской частоте, а также когерентного интегрирования отраженных от цели сигналов. Устройство обработки данных состоит из двух секций —
53
Решетка приемной антенны состоит из антенных панелей, при емных модулей, устройства управления лучом, гетеродина, устрой ства распределения мощности, калибровочного оборудования и схемы формирования луча. Приемная антенна содержит 19 500 ви браторов, образующих круговую апертуру, по диаметру которой располагается 152 элемента.
Приемный модуль представляет собой малошумящий суперге теродинный приемник на транзисторах с двойным преобразованием по частоте: в первый смеситель поступает сигнал от местного гете родина, управляемого частотным генератором всей системы, во втором смесителе используется сигнал отклонения луча. После усиления по высокой частоте с помощью местных гетеродинов фор мируются два независимых сигнала первой промежуточной часто ты с шириной полосы 1 Мгц, разнесенные на 3 Мгц. Эти сигналы перед смешением модулируются сигналом с частотой 100 Мгц из блока управления лучом. В результате создается модулированный сигнал второй промежуточной частоты (20,5 и 23,5Мгц). Приемный модуль имеет высокий коэффициент усиления для компенсации по терь в пассивной схеме формирования луча.
Вид поляризации (горизонтальная либо вертикальная) опреде ляется путем использования для каждого канала сигналов местно го генератора с отличающейся частотой. Отдельные распредели тельные системы делят поровну 500-ваттную выходную мощность каждого местного гетеродина между 4660 модулями.
Блок формирования луча (матрица 3x3) образует пучок из девяти узких лучей шириной 0,4° каждый. В режиме поиска ис пользуются все девять лучей, в режиме сопровождения — цен тральный и четыре противолежащих друг другу луча.
В системе AN/FPS-85 применяются семь различных сигналов для трех режимов работы (табл. 2.1): обнаружения, сопровожде ния и когерентной обработки. Сигнал поиска длительностью 250 мксек с линейной ЧМ обеспечивает минимальную вероятность ложной тревоги и спектральную полосу, требуемую для работы без допплеровских фильтров. Потери в этом случае не превышают по тери в допплеровских фильтрах. Модулированный импульс дли тельностью 250 мксек, прошедший через линию задержки, обеспе чивает хорошее разрешение по дальности.
Поисковый импульс длительностью 10 мксек и простой импульс сопровождения (1 мксек) позволяют работать с минимальным рас ходом энергии по большому числу целей, находящихся на малой дальности.
В РЛС AN/FPS-85 применяются 11 различных схем сопровож дения, подразделяющихся в общем на два типа — сопровождение известных и неизвестных объектов. При сопровождении известных объектов для расчета их эфемерид используются записанные в оперативную память ЭВМ параметры орбиты. Новые данные о па раметрах орбиты в режиме сопровождения используются для пред сказания траекторий .наблюдаемой цели.
55
Т а б л и ц а 2.1
Сигналы, излучаемые AN FPS-85
Наимгнование сигнала |
|
Длительность |
! |
|
Назначение |
|
|||||
Импульс поиска с ли |
250 |
мксек |
|
|
Поиск |
на |
больших |
||||
нейной ЧМ |
|
|
|
|
|
|
дальностях, |
автосопро |
|||
|
|
|
|
|
|
|
вождение |
и опознавание |
|||
Простой |
импульс |
10 |
мксек |
|
|
РЛ отметок |
|
|
|||
|
|
Поиск на малых даль |
|||||||||
Импульс |
сопровожде |
250 |
мксек |
|
|
ностях |
|
|
на |
||
|
|
Сопровождение |
|||||||||
ния с линейной ЧМ |
1 мксек |
|
|
больших |
расстояниях |
||||||
Простой |
импульс со |
|
|
Сопровождение |
на ма |
||||||
провождения |
|
|
|
|
|
лых |
расстояниях |
и поиск |
|||
Когерентный |
сигнал |
Пачка из 40 импульсов |
|
БР |
|
|
|
в боль- |
|||
|
Сопровождение |
||||||||||
дальности |
|
|
по 125 мксек. Длитель |
|
шом |
диапазоне |
дально |
||||
|
|
|
ность пачки |
1 сек |
|
стей и получение сиг |
|||||
Когерентный |
сигнал |
Пачка из 40 импульсов |
|
нальных |
признаков цели |
||||||
|
Измерение |
допплеров- |
|||||||||
скорости |
|
|
по 25 мксек. Длитель |
|
ской частоты и сигналь |
||||||
Когерентный |
сигнал |
ность пачки 0,2 сек |
|
ная |
селекция |
|
|
||||
Пачка из 40 импульсов |
|
Точное |
сопровождение |
||||||||
точной дальности |
|
по 5 мксек, ступенчатая |
|
по дальности |
|
|
|||||
|
|
|
частота, |
длительность |
|
|
|
|
|
|
|
Импульс |
калибровки |
пачки 1,2 мсек |
|
Калибровка (контроль) |
|||||||
60 |
мксек |
|
|
||||||||
|
|
|
|
|
|
|
блоков приемника и пе |
||||
|
|
|
|
|
|
|
редатчика |
|
|
||
При сопровождении неизвестных объектов полученные данные используются для предсказания поведения объекта. Сопровождение неизвестных объектов и некоторых объектов, требующих большой скорости обработки данных, производится при помощи простой экстраполяции по двум точкам с поправками на кориолисово уско рение и ускорение силы тяжести. Орбита ИСЗ или траектория МБР вычисляется в течение 1—2 мин. РЛС AN/FPS-85 способна сопровождать почти одновременно 200 известных или 20 неопоз нанных космических объектов, автоматически передавая их пара метры в центр ПКО.
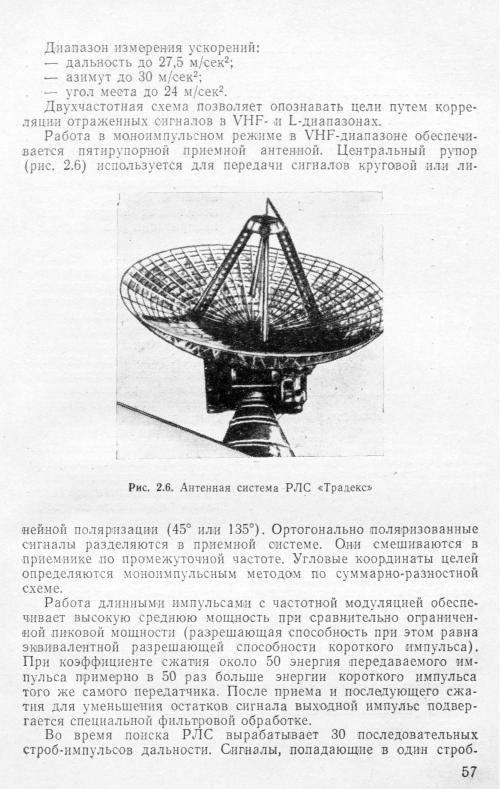
РЛС «Традекс», относящаяся к группе радиолокаторов типа AN/FPS-16, характеризуется большой мощностью и высокой раз решающей способностью по допплеровской частоте. Высокая ча стота повторения импульсов (около 1500 импульсов в секунду) позволяет использовать большой темп считывания информации. Автоматическое сопровождение начинается сразу после того, как на следящие системы поступит отраженный сигнал от данной цели.
Диапазон скоростей слежения:
—по дальности до 18,3 км/сек;
—по азимуту и углу места до 12 град/сек.
56
импульс, накапливаются на магнитном диске. Таким образом по лучается информация в виде непрерывных сигналов, соответствую щих допплеровским частотам целей, находящихся в данном стробимпульсе. Иллюстрация разделения целей по дальности и доппле ровской скорости представлена на рис. 2.7.
В РЛС «Традекс» имеется восемь приемных каналов: верти кально и горизонтально поляризованные каналы опорных сигна
лов; канал сигнала |
ошибки |
(по углу |
места |
и азимуту); |
каналы, |
|||||||||
|
|
|
|
используемые |
|
для |
|
работы |
||||||
|
|
|
|
в моноимпульсном |
режиме |
|||||||||
|
|
|
|
в VHF-диапазоне; |
опорный |
|||||||||
|
|
|
|
канал |
для |
каждого |
вида |
|||||||
|
|
|
|
поляризации |
|
в |
L-диапа- |
|||||||
|
|
|
|
зоне. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Принятые импульсы сжи |
||||||||||
|
|
|
|
маются с помощью согласо |
||||||||||
|
|
|
|
ванного |
фильтра |
посредст |
||||||||
|
|
|
|
вом |
использования |
усилите |
||||||||
|
|
|
|
лей с коэффициентом |
пере |
|||||||||
|
|
|
|
дачи, зависящим от дально |
||||||||||
|
|
|
|
сти до цели. Выходные сиг |
||||||||||
|
|
|
|
налы |
приемника |
содержат |
||||||||
|
|
|
|
информацию обо всех целях, |
||||||||||
|
|
|
|
видимых |
радиолокатором. |
|||||||||
|
|
|
|
Именно |
эта |
информация |
и |
|||||||
|
|
|
|
Накапливается |
устройством |
|||||||||
Рис. 2.7. Разделение целей по дальности и |
для |
записи |
на магнитную |
|||||||||||
ленту по промежуточной ча |
||||||||||||||
допплеровской скорости в РЛС «Традекс», |
||||||||||||||
использующей метод когерентного интегри |
стоте. |
Помимо |
стробирова |
|||||||||||
рования (отношение сигнал/шум единичного |
ния |
целей по |
дальности, |
в |
||||||||||
импульса равно |
16 дб |
для цели 1 и 5 дб |
РЛС используется схема ав |
|||||||||||
для |
целей |
2, 3) |
|
тосопровождения |
по |
скоро |
||||||||
целей находятся в |
пределах |
|
сти в случае, если несколько |
|||||||||||
строб-импульса |
дальности. |
В |
этой |
|||||||||||
схеме и производится автоматическое регулирование частоты. Результаты испытаний РЛС «Традекс» по слежению за искус
ственными спутниками Земли и Луны выявили следующие точно
стные характеристики системы: по дальности — 44,8 м; по |
скоро |
сти — 42,7 м/сек. |
входя |
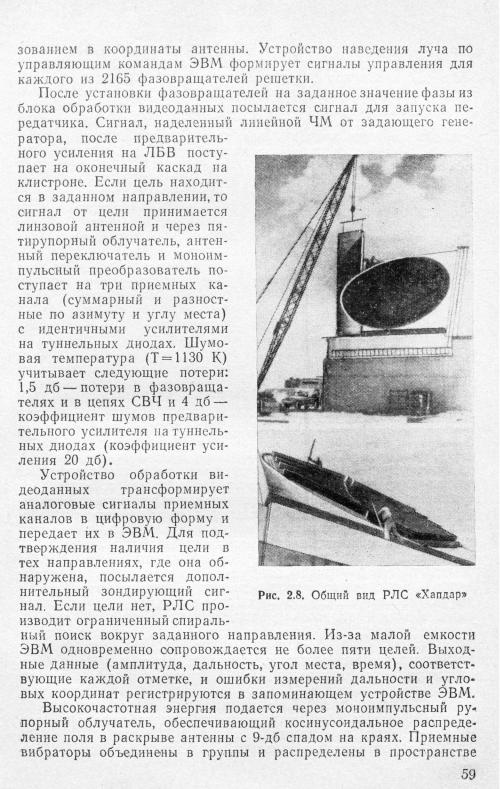
РЛС «Хапдар» (рис. 2.8) — многофункциональная РЛС, |
щая в комплекс перехвата ПРО укрепленных пунктов. РЛС рабо тает в моноимпульсном режиме с разделением сигналов по време ни. Используется ФАР типа TACOL. Станция полностью автома тизирована. Один передатчик обслуживает конический сектор об зора 90°.
РЛС работает следующим образом. Данные целеуказания с пункта управления принимаются системой «модулятор — демоду лятор» и направляются в ЭВМ, которая привязывает указанные координаты цели к точке стояния РЛС с последующим их преобра
58