

РГР
.pdf
|
|
11 |
|
|
Составим условия равновесия: |
|
|
||
n |
|
|
|
|
kX |
|
RAX+RBX+P1¡P2+P4 cos ®+Q1 sin ®¡Q2 = 0; |
|
|
Fkx = 0; |
|
(1) |
||
=1 |
|
|
|
|
n |
|
|
|
|
kX |
|
RAY +RBY ¡P3¡P4 sin ®+Q1 cos ®¡P5 = 0; |
|
|
Fky = 0; |
|
(2) |
||
=1 |
= 0; |
RBY ¢ 16 ¡ P1 ¢ 6 + P2 ¢ 3 ¡ P3 ¢ 4 ¡ P4 cos ® ¢ 3+ |
|
|
k=1 MAZ ³F~k´ |
|
|||
n |
|
|
|
|
X |
|
+Q1 cos ® ¢10¡Q1 sin ® ¢7:5¡P5 ¢12+Q2 ¢7¡M = 0: |
(3) |
|
|
|
|||
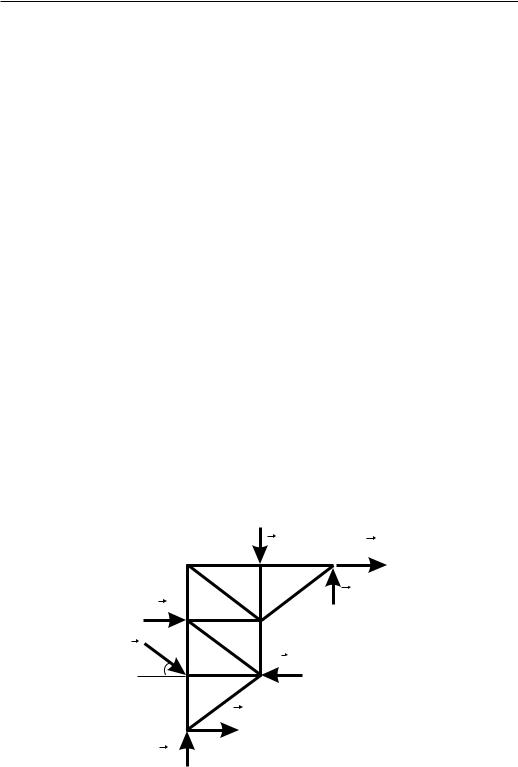
Рассмотрим равновесие левой части конструкции - фермы. Силовая схема представлена на Рис.3.
Составим условия равновесия:
n |
|
|
|
kX |
|
RAX+RCX+P1¡P2+P4 cos ® = 0; |
|
Fkx = 0; |
|
(4) |
|
=1 |
|
|
|
n |
|
|
|
kX |
|
RAY +RCY ¡P3¡P4 sin ® = 0; |
|
Fky = 0; |
|
(5) |
|
=1 |
= 0; |
¡RCX ¢9+RCY ¢8¡P1 ¢6+P2 ¢3¡P3 ¢4¡P4 cos ® ¢3 = 0: |
(6) |
k=1 MAZ ³F~k´ |
|||
n |
|
|
|
X |
|
|
|
|
|
P3 |
|
|
RCY |
P5 |
|
|
|
D |
C |
RCX |
RCX |
|
|
||
|
|
|
|
|
||||
|
|
|
|
|
C |
|
|
|
3ì |
P1 |
|
|
RCY |
α |
|
|
0.5ì |
|
|
|
|
|
|
|
||
|
|
|
|
Q1 |
|
|
Q2 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
3ì |
P4 |
|
|
|
|
q1 |
|
|
|
|
|
|
|
|
|
||
|
α |
|
P2 |
|
|
|
|
7ì |
3ì |
|
|
|
|
|
M |
|
RBX |
|
A |
RAX |
|
|
|
|
B |
|
|
|
|
|
|
|
|||
|
RAY |
|
|
|
|
|
RBY |
|
|
|
|
|
|
|
|
||
4ì |
4ì |
2ì |
2ì |
4ì |
Ðèñ. 3 |
Ðèñ. 4 |

12
Рассмотрим равновесие правой части конструкции - пластины. Сило-
вая схема представлена на Рис.4. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
Учитывая, что в соответствии с третьим законом Ньютона |
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
¡!CX = |
|
|
|
|
|
¡!CX; |
|
!¡ CY |
= |
|
|
¡!CY |
; |
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
R0 |
|
|
|
¡ |
R |
|
R0 |
|
|
¡ |
|
R |
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Получаем уравнения равновесия в виде: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
kX |
¡RCX+Q1 sin ®¡Q2+RBX = 0; |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
Fkx = 0; |
|
|
|
|
|
|
|
|
(7) |
||||||||||||||||||||||||||||||||
=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
kX |
¡RCY +RBY ¡P5+Q1 cos ® = 0; |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
Fky = 0; |
|
|
|
|
|
|
|
|
(8) |
||||||||||||||||||||||||||||||||
=1 |
|
|
|
|
|
|
RBY ¢8+RBX ¢9¡P5 ¢4+Q1 cos ®¢2+ |
|
|
|
|||||||||||||||||||||||||||||||
k=1 MCZ ³F~k´ = 0; |
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
X |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+Q1 sin ®¢1:5¡Q2 ¢2¡M = 0: |
|
|
(9) |
||||||||||||||||||||
Определим составляющие реакций. Из уравнения (3) находим: |
|||||||||||||||||||||||||||||||||||||||||
3 |
|
|
|
|
3 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
5 |
|
||||||||||||
RBY = P1 ¢ |
|
|
¡ P2 |
¢ |
|
|
|
|
+ P3 ¢ |
|
|
+ P4 cos ® ¢ |
|
|
|
¡ Q1 |
|
cos ® ¢ |
|
|
+ |
||||||||||||||||||||
8 |
16 |
4 |
16 |
8 |
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
15 |
|
|
|
|
|
|
|
3 |
|
|
|
7 |
|
|
|
1 |
|
|
|
|
400 |
|
|
|
|
|
|
|||||||||
+Q1 sin ® ¢ |
|
+ P5 ¢ |
|
|
¡ Q2 |
¢ |
|
+ M ¢ |
|
|
= |
|
|
|
= 25 kH: |
|
|||||||||||||||||||||||||
32 |
4 |
16 |
16 |
16 |
|
|
|||||||||||||||||||||||||||||||||||
Из уравнения (2) находим: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
RAY = ¡RBY + P3 + P4 sin ® ¡ Q1 cos ® + P5 = 15 kH: |
|
|
|
||||||||||||||||||||||||||||||||||||||
Из уравнения (5) находим: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
RCY = ¡RAY + P3 + P4 sin ® = 24 kH: |
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
Из уравнения (6) находим: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
8 |
|
|
|
2 |
|
|
|
1 |
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|||||||||||||
RCX = RCY ¢ |
|
|
¡ P1 |
¢ |
|
|
|
+ P2 ¢ |
|
|
¡ P3 ¢ |
|
¡ P4 |
cos ® ¢ |
|
|
= ¡8 kH: |
||||||||||||||||||||||||
9 |
3 |
|
3 |
9 |
3 |
||||||||||||||||||||||||||||||||||||
Из уравнения (4) находим:
RAX = ¡RCX ¡ P1 + P2 ¡ P4 cos ® = ¡16 kH:
13
Из уравнения (7) находим:
RBX = ¡Q1 sin ® + Q2 + RCX = ¡14 kH:
Для проверки подставляем полученные результаты в неиспользованные уравнения (1), (8) и (9):
RAX + RBX + P1 ¡ P2 + P4 cos ® + Q1 sin ® ¡ Q2 = 48 ¡ 48 ´ 0;
¡RCY + RBY ¡ P5 + Q1 cos ® = 1 ¡ 1 ´ 0;
RBY ¢8+RBX ¢9¡P5 ¢4+Q1 cos ®¢2+Q1 sin ®¢1:5¡Q2 ¢2¡M = 264¡264 ´ 0:
Как видно, уравнения удовлетворяются тождественно. Следовательно, величины реакций определены верно. Таким образом:
RAX = ¡16 kH; |
RBX = ¡14 kH; |
RCX = ¡8 kH; |
RAY = 15 kH; |
RBY = 25 kH; |
RCY = 24 kH: |
Часть 2. Расч¨ет фермы.
Все внешние силы, приложенные к ферме, известны. Обозначим буквами все узлы фермы и цифрами - все е¨ стержни (Рис.5).
D |
|
|
|
P3 |
|
C |
RCX |
|
4 |
N |
|
|
|||
|
|
12 |
|
||||
|
|
|
|
|
|||
|
|
|
5 |
10 |
13 |
|
|
|
|
|
|
|
|
RCY |
|
|
3 |
|
|
|
|
|
|
P1 |
|
6 |
|
|
|
|
|
E |
|
|
|
L |
|
|
|
|
|
7 |
|
|
|
|
|
P4 |
|
|
11 |
|
|
|
|
2 |
|
|
|
|
|
||
|
|
|
|
|
|
||
α |
|
8 |
|
|
P2 |
|
|
K |
|
|
|
H |
|
|
|
|
|
9 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
RAX |
|
|
|
|
|
|
|
|
|
|
|
|
RAY |
|
|
|
|
|
|
|
Ðèñ. 5

14
Метод вырезания узлов.
Расч¨ет начинают с узла, соединяющего два стержня фермы. Затем переходят к соседним узлам в определ¨енной последовательности, которая позволяет на каждом шаге определять усилия в очередных двух стержнях. Первоначально предполагается, что стержни растянуты, т.е. их реакции направлены от узлов. Если усилие в каком–либо стержне оказывается отрицательным, то это означает, что данный стержень сжат.
Узел A |
(Рис.6) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
kX |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
F e |
= 0; |
S9 cos ® + RAX = 0; |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
kx |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
kX |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
Fkye = 0; |
S2 + S9 sin ® + RAY = 0: |
|
|
|
|||||||||||||
|
|
|
|
|
|
=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Отсюда: |
|
|
|
|
|
|
RAX |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
S9 = ¡ |
= 20; kH стержень растянут |
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
cos ® |
|
|
|
||||||||||||||||||
|
|
|
S1 = ¡RAY ¡ S9 sin ® = ¡27 kH: |
|
стержень сжат |
|
||||||||||||||||||||
Узел K |
(Рис.7) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kX |
Fkxe = 0; |
S8 + P4 cos ® = 0; |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
kX |
|
|
S2 ¡ S1 ¡ P4 sin ® = 0: |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
Fkye = 0; |
|
|
|
|||||||||||||
|
|
|
|
|
|
=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Отсюда: |
S8 = ¡P4 cos ® = ¡12 kH; |
стержень сжат |
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
S2 = S1 + P4 cos ® = ¡18 kH: |
стержень сжат |
|
|||||||||||||||||||
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
S9 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S2 |
|
|
|
|||||||||
|
|
S1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
P4 |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K |
S8 |
x |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
α |
||||||||
|
|
|
|
|
|
|
|
RAX |
|
|
|
|
|
|
|
|
||||||||||
|
|
A |
|
α |
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RAY |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S1 |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ðèñ. 6 |
Ðèñ. 7 |

15
Узел H (Рис.8)
n |
|
|
|
|
kX |
|
|
|
|
Fkxe = 0; |
S7 |
cos ® + S8 + S9 cos ® + P2 = 0; |
||
=1 |
|
|
|
|
n |
|
|
|
|
kX |
|
S11 + S7 sin ® ¡ S9 sin ® = 0: |
||
Fkye = 0; |
||||
=1 |
|
|
|
|
Отсюда: |
|
|
|
|
S7 = ¡ |
S8 |
¡ S9 |
= ¡20; kH |
стержень сжат |
cos ® |
||||
S11 = ¡S7 sin ® + S9 sin ® = 24 kH: |
стержень растянут |
|||
Узел E |
(Рис.9) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
kX |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
F e |
= 0; |
S6 + S7 |
cos ® + P1 = 0; |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
kx |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
kX |
|
S3 ¡ S7 |
sin ® ¡ S2 = 0: |
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
Fkye |
= 0; |
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Отсюда: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
S6 = ¡S7 cos ® ¡ P1 = ¡8; kH стержень сжат |
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
S3 = S7 sin ® + S2 = ¡30 kH: |
стержень сжат |
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S11 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S3 |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S6 |
|
||||
|
|
S8 |
α |
|
|
|
|
P2 |
x |
|
|
P1 |
E |
x |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
α |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
α |
|
|
|
|
|
|
|
|
|
|
|
|
|
H |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
S9 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S7 |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S2 |
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Ðèñ. 8 |
Ðèñ. 9 |

16
Узел D |
(Рис.10) |
|
|
|
||
|
n |
|
|
|
||
|
kX |
|
|
|
||
|
|
Fkxe |
= 0; |
S4 |
+ S5 cos ® = 0; |
|
|
=1 |
|
|
|
|
|
|
n |
|
|
|
||
|
kX |
|
|
|
||
|
|
Fkye |
= 0; |
S3 |
+ S5 sin ® = 0: |
|
|
=1 |
|
|
|
|
|
Отсюда: |
|
S3 |
|
|
|
|
|
S5 = ¡ |
= 50; kH |
|
стержень растянут |
||
|
|
|
|
|||
|
sin ® |
|
||||
|
S4 = ¡S5 cos ® = ¡40 kH: стержень сжат |
|||||
Узел N |
(Рис.11) |
|
|
|
||
|
|
n |
|
|
|
|
|
|
kX |
|
|
S12 ¡ S4 = 0; |
|
|
|
Fkxe = 0; |
|
|||
|
=1 |
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
kX |
|
|
|
|
|
|
Fkye = 0; |
|
S10 + P3 = 0: |
||
|
=1 |
|
|
|
|
|
Отсюда: |
S12 = S4 = ¡40; kH |
стержень сжат |
||||
|
||||||
|
S10 = ¡3 = ¡30 kH: |
стержень сжат |
||||
y |
|
|
|
y |
|
|
|
S4 |
x |
P3 |
|
D |
|
|
|
||
|
|
S12 |
|
||
|
|
S4 |
x |
||
|
α |
|
|||
|
|
|
|
||
|
|
|
|
N |
|
|
|
S5 |
|
|
|
S3 |
|
|
|
S10 |
|
|
|
|
|
|
Ðèñ. 10 |
Ðèñ. 11 |
Узел L (Рис.12)
Xn
Fkxe = 0; S13 cos ® ¡ S5 cos ® ¡ S6 = 0;
k=1

17
Отсюда:
S5 = |
S6 |
+ S5 = 40; kH |
стержень растянут |
|
cos ® |
||||
|
|
|
Определены усилия во всех стержнях фермы. Оставшиеся уравнения равновесия узлов используем для проверки полученных результатов.
Xn
Fkye = 0; S10 + S13 sin ® + S5 sin ® = 54 ¡ 54 ´ 0:
k=1
|
|
|
|
|
y |
|
|
|
|
|
|
|
y |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
S13 |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
S5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
S10 |
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
S12 |
C |
RCX |
x |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
α |
|
|
|
|
|
|
|
S6 |
|
|
α |
|
|
|
|
α |
|
x |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
L |
|
|
|
|
|
|
S13 |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
RCY |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S11 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
Ðèñ. 12 |
|
|
|
|
|
|
|
Ðèñ. 13 |
|
|
|
|
|||||||
Узел C (Рис.13)
Xn
Fkxe = 0; RCX ¡ S12 ¡ S13 cos ® = 40 ¡ 40 ´ 0;
k=1
Xn
Fkye = 0; RCY ¡ S13 sin ® = 24 ¡ 24 ´ 0:
k=1
Метод сквозных сечений.
Провед¨ем сквозное сечение по третьему, шестому и одиннадцатому стержням. Рассмотрим равновесие нижней части фермы. Силовая схема представлена на Рис.14. Выбираем условия равновесия таким образом, чтобы в каждое из них входила только одна неизвестная.
k=1 MLZ ³F~k´ |
= ¡S4 ¢4¡P2 ¢3+P4 sin ®¢4+P4 cos ®¢3+RAX ¢6¡RAY ¢4 = 0: |
n |
|
X |
|

|
|
|
|
|
|
|
18 |
Отсюда |
S3 = ¡30 kH: |
|
|
|
|
||
|
n |
|
= S6 + P1 ¡ P2 + P4 cos ® + RAX = 0: |
|
|
||
|
=1 |
Fkxe |
|
|
|||
|
kX |
|
|
|
|
|
|
Отсюда |
S6 = ¡8 kH: |
|
|
|
|
||
n |
|
|
= S11 ¢ 4 ¡ P2 ¢ 3 + P4 cos ® ¢ 3 + RAX ¢ 6 = 0: |
|
|||
k=1 MEZ ³F~k´ |
|
||||||
X |
|
|
|
|
|
|
|
Отсюда |
S11 = 24 kH: |
|
|
|
|
||
y |
|
|
|
|
|
|
|
S3 |
|
|
|
y |
|
|
|
|
|
|
S11 |
|
|
|
|
|
|
|
|
|
|
|
|
P1 |
S6 |
L |
|
|
|
|
|
|
|
P3 |
|
|
|||
E |
|
|
|
|
|
|
|
|
|
S4 |
N |
C |
RCX |
x |
|
P4 |
|
|
|
|
|||
α |
α |
|
P2 |
|
α |
|
|
|
|
|
|
|
|||
K |
|
H |
|
S10 |
|
RCY |
|
|
|
|
|
|
|||
A |
RAX |
x |
L |
S13 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
RAY
Ðèñ. 14 |
Ðèñ. 15 |
Второе сквозное сечение провед¨ем через четв¨ертый, десятый и тринадцатый стержни (Рис.15).
k=1 MLZ ³F~k´ |
= S4 ¢ 4 + RCY ¢ 4 ¡ RCY ¢ 3 = 0: |
Отсюда |
S4 = ¡40 kH: |
|
n |
|
|
|
|
X |
|
|
|
|
k=1 MCZ ³F~k´ = S10 ¢ 3 + P3 ¢ 3 = 0: Отсюда S10 = ¡30 kH: |
||||
n |
|
|
|
|
X |
³F~k |
´ = ¡S13 sin ® ¢ 4 + RCY ¢ 4 = 0: |
|
|
n |
|
|
||
X |
Отсюда |
|
||
k=1 MNZ |
S13 = 40 kH: |
|||

19
Построение диаграммы Максвелла–Кремоны.
На Рис.16 приведена разбивка на внешние и внутренние зоны действия сил.
|
|
|
|
|
|
1 |
8 |
|
|
|
|
|
|
|
|
|
|
|
Масштаб |
|
|
|
|
|
|
|
|
|
2kH |
|
|
|
P3 |
|
|
|
2, 13 |
|
3 |
|
|
|
|
|
|
|
|
||
|
D |
N |
|
IV |
C |
RCX |
|
|
|
|
|
|
|
|
|
|
|||
|
III |
XIII |
XIV |
|
7 |
|
|
6 |
|
|
|
V |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
P1 |
E |
XII |
|
|
RCY |
|
|
|
|
|
|
|
L |
VI |
|
|
|
|
|
|
II |
XI |
|
9 |
|
|
|
||
P4 |
|
|
|
10, 14 |
|
|
|||
|
α |
X |
H |
P2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
K |
IX |
VII |
|
|
|
|
11 |
12 |
|
I |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
RAX |
|
|
|
|
|
|
|
|
VIII |
|
|
|
|
|
|
|
RAY
5 |
|
4 |
Ðèñ.16 |
Ðèñ.17 |
Диаграмма Максвелла–Кремоны приведена на Рис.17.
Таблица полученных результатов.
Метод |
Усилие |
S 1 |
S 2 |
S 3 |
S 4 |
S 5 |
S 6 |
S 7 |
S 8 |
S 9 |
S 10 |
S 11 |
S 12 |
S 13 |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Метод вырезания |
-27 |
-18 |
-30 |
-40 |
50 |
-8 |
-20 |
-12 |
20 |
-30 |
24 |
-40 |
40 |
|
|
узлов |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Метод сквозных |
|
|
-30 |
-40 |
|
-8 |
|
|
|
-30 |
24 |
|
40 |
|
|
сечений |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Диаграмма Максвелла- |
-27 |
-18 |
-30 |
-40 |
50 |
-8 |
-20 |
-12 |
20 |
-30 |
24 |
-40 |
40 |
|
Кремоны |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
20 |
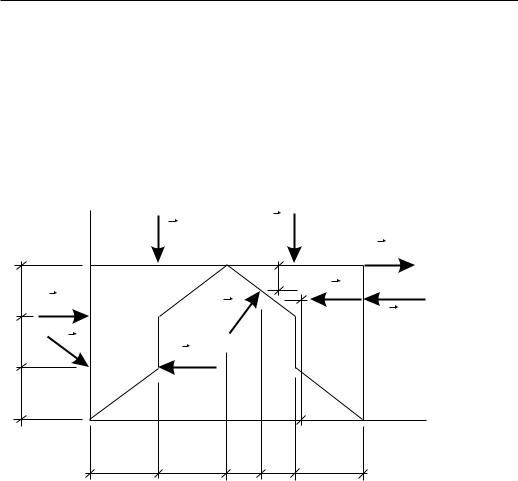
Часть 3. Приведение системы активных сил к |
||||||||||
простейшему виду. |
|
|
|
|
|
|
|
|
||
|
На Рис.19 изображена система активных сил, приложенных к рас- |
|||||||||
|
|
|
G1 |
G2 |
|
|
|
|
|
|
сматриваемой конструкции. Силы ¡! |
и ¡! составляют пару сил с задан- |
|||||||||
ным моментом MZ = ¡6 kH=м. Эту систему сил необходимо привести к |
||||||||||
простейшему виду. |
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
P5 |
|
|
|
|
|
|
|
|
P3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D |
|
C |
|
G 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1.5 M |
|
|
P1 = 24 kH; |
|||
3 M |
|
|
|
G 2 |
|
|
|
|
|
|
P1 |
|
|
|
|
P2 |
= 12 kH; |
||||
|
|
Q 1 |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
Q 2 |
|
P3 |
= 30 kH; |
|||
|
|
|
|
|
|
|||||
3 M |
P4 |
P2 |
|
7 M |
|
|
P4 |
= 15 kH; |
||
|
|
|
|
|
P = 335 |
kH; |
||||
|
|
|
|
|
|
|
||||
3 M |
|
|
|
|
|
|
Q 1 |
= 40 kH; |
||
|
A |
|
|
|
B |
x |
Q 2 |
= 18 kH; |
||
|
|
|
|
|
|
|
G 1 |
= 6 kH; |
||
|
4 M |
4 M |
2 M |
2 M |
4 M |
|
G 2 |
= 6 kH. |
||
|
|
|
Ðèñ.19 |
|
|
|
|
|
|
|
|
Графическое построение равнодействующей. |
|
|
|
|
|
||||
|
На Рис.20 изображена в масштабе заданная система активных сил. |
||||||||
|
P 0 |
|
|
|
|
P |
G |
|
Q0 |
Сила ¡!3 Представляет собой равнодействующую сил ¡!3 |
и ¡!1; сила ¡!2 |
||||||||
|
|
|
Q |
G |
|
|
|
|
|
- авнодействующая сил ¡!2 |
и !¡ |
2. |
|
|
|
|
|||
|
Выбранная последовательность сложения сил следующая. Сначала |
||||||||
|
|
|
|
|
P |
P |
|
|
|
строится равнодействующая сил ¡!2 |
и ¡!4; полученный результат скла- |
||||||||
|
P |
Q0 |
|
|
R |
|
|
|
|
|
¡! |
- получаем силу ¡!1. Далее заменяем силы |
|||||||
дывается с ¡!1, затем с |
2 |
||||||||
P 0 |
Q |
|
|
|
|
|
P |
|
|
¡!3 |
и ¡!1 равнодействующей, которую складываем с силой ¡!5 |
- полу- |
|||||||
|
R |
|
|
|
|
|
R |
R |
2, то |
чаем силу !¡ |
2. Оста¨ется построить равнодействующую сил ¡!1 и |
!¡ |
|||||||
!¡
есть равнодействующую F заданной системы активных сил.