

3. Решение системы линейных
УРАВНЕНИЙ.
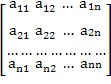
Система n уравнений от n неизвестных называется линейной, если неизвестные входят в неё только в первой, например:
a
(2.1)
a21x1 + a22x2 + … + a2nxn = b2
……………………………………
an1x1 + an2x2 + … + annxn = bn
Здесь aij-коэффициенты уравнений;
xi- неизвестные;
bi- свободные члены уравнений (i,j=1,2..n).
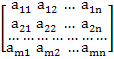
Записывая коэффициенты этой системы aij в виде прямоугольной таблицы, а неизвестные xi и свободные члены bi в виде столбцов.
A=
 , x=
, x=![]() , b
=
, b
=![]()
Систему уравнений (2.1) можно записать в векторно-матричном виде:
Ax=b
Здесь: A-матрица коэффициентов системы
x- вектор-столбец неизвестных
b- вектор-столбец свободных членов.
Так как алгебра матриц широко используется в теории линейных уравнений, рассмотрим ее основные понятия.
3.1 Основные понятия алгебры матриц.
Матрицей называется система m×n чисел, расположенных в виде прямоугольной таблицы из m строк и n столбцов
A=
Если m=n, то матрицу называют квадратной порядка n. Прямоугольную матрицу типа m×n обозначают в виде A=[aij]m×n.
Квадратная матрица вида
A=
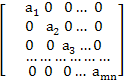
называется диагональной и обозначается A=[a1 ,a2,…,an].
Если ai=1(i=1,2…,n), то матрица называется единичной и обозначается буквой E
E=
Матрица называется нулевой, если все ее элементы равны нулю. Она обозначается Omn. Матрица называется верхней треугольной, если все элементы ее ниже главной диагонали равны нулю, и нижней треугольной, если ее элементы выше главной диагонали нулевые.
Матрица называется ленточного типа, если ненулевые элементы её располагаются параллельно главной диагонали, а остальные равны нулю.
Каждой квадратной матрице A соответствует определитель (детерминант), который обозначается detA или ∆.
Определители для матриц второго и третьего порядка вычисляются по правилу Саррюса:
∆ =
detA
= ![]() =
=
![]()
В этом случае определитель равен разности произведений элементов матрицы, расположенных вдоль главных диагоналей
Для вычисления определителя 3-го порядка к ней справа добавляются два первых столбца элементов, а затем составляется сумму произведений элементов, расположенных вдоль диагоналей, причем произведения элементов сверху вниз берутся со знаком плюс, а снизу вверх- со знаком минус.
detA
=  =
= ![]()
3.2 Действия с матрицами
Если матрицы A и B одного типа, то имеет смысл операции сложения и вычитания.
Матрица суммы (разности), матриц A и B есть матрица C, элементы которой равны сумме (разности) соответствующих элементов матриц A и B.
Матрицу A можно умножить на число α. В результате получается матрица B, элементы которой получены умножением всех элементов матрицы A на число α.
Матрица –A=(–1)A называется противоположной матрице А. Если A-квадратичная матрица порядка n, то определитель матрицы C= αA равен:
detC = detαA = αndetA
Операция умножения матриц:
Пусть A и B матрицы типов m×n и p×q соответственно. Если число столбцов n матрицы A равно числу строк p матрицы B(n=p), то для этих матриц существует матрица C типа m×q, являются их произведением.
C
=  ,
,
где
![]() (i=1,2,…,m,
j=1,2,…,q)
(i=1,2,…,m,
j=1,2,…,q)
Т.е.
элемент матрицы ![]() – равен сумме произведений элементов
i-ой
строки матрицы A
на соответствующие элементы j-го
столбца матрицы B.
– равен сумме произведений элементов
i-ой
строки матрицы A
на соответствующие элементы j-го
столбца матрицы B.
В общем случае AB ≠ BA. Если матрица A типа m×n и B типа p×q, то AB – матрица типа m×q, а BA – p×n.
Например:
A
= ![]() ;
B =
;
B = ![]() ;
AB =
;
AB = ![]()
BA
= ![]() ,
т.е.
AB ≠ BA;
,
т.е.
AB ≠ BA;