

Метрология и электрорадиоизмерения / Вспомогательный теоретический материал / [lect] Данилин А.А. - Измерения в радиоэлектронике
.pdfПередатчик |
Нагрузка линии |
Витая пара |
Приемные модули
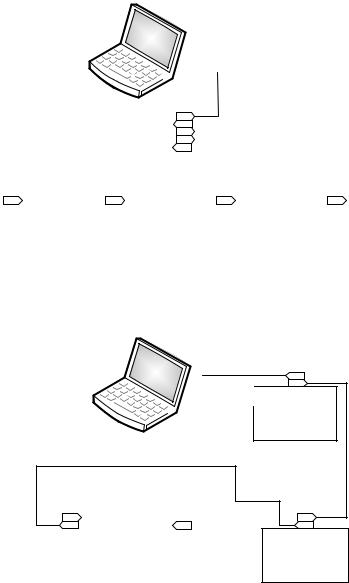
Рис. 16.6. Структура измерительной системы с интерфейсом RS–422
Этот стандарт допускает подключение к одному передатчику до 10 приемников и однонаправленную передачу с возможностью соединения «точка-точка», а также многоабонентский режим доставки сообщений. Более гибким является полудуплексный многоточечный дифференциальный интерфейс RS–485 (EIA–485). Он позволяет подключать к двухпроводной скрученной линии («витая пара», twisted pair – TP ) до 32 приемопередатчиков (рис.16.7).
Передатчик
|
|
|
|
|
|
|
|
|
|
|
|
|
Витая пара |
Нагрузка линии |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
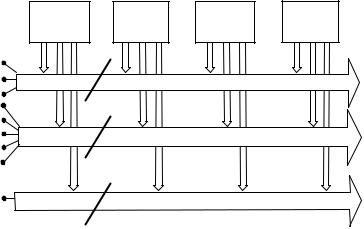
Рис. 16.7. Интерфейс RS–485
Используются шинные формирователи модулей ИС с дополнительным состоянием (нейтральный высокоимпедансный Z-режим), которое не мешает обмену информацией. Длина канала связи интерфейса RS–485 может достигать сотен метров, скорость передачи до 10 Mбит/с, она связана с длиной линии связи:
•62,5 кбит/с – 1200 м (одна витая пара),
•375 кбит/с – 500 м (одна витая пара),
383
•2400 кбит/с – 100 м (две витых пары),
•10000 кбит/с – 10 м.
Для передачи информации между модулями используют протоколы типа «Master/Slave», где подчиненный модуль имеет свой адрес и отвечает только на адресованные ему пакеты. Используют два типа линий – с одной витой парой (полудуплекс) и с двумя. Во втором случае мастермодуль по одной паре соединяется со всеми приемниками, другая пара используется для связи приемников с мастер-модулем. Это позволяет осуществить полную дуплексную связь.
Сравнение основных параметров рассмотренных последовательных интерфейсов приведено в таблице 16.1
|
|
|
Таблица 16.1. |
|
|
|
|
|
|
|
RS232 |
RS422 |
RS485 |
|
Тип передачи |
Несимметричная |
Дифференциаль- |
Дифференциаль- |
|
|
линия |
ная линия |
ная линия |
|
Общее количество |
1 передатчик |
1 передатчик |
32 передатчика |
|
передатчиков |
1 приемник |
10 приемников |
32 приемника |
|
и приемников |
||||
|
|
|
||
Максимальная |
До 15м |
До 1200м |
До 1200м |
|
длина кабеля |
||||
|
|
|
||
Максимальная |
20 кбит/с |
100кбит/с … |
100кбит/с … |
|
скорость передачи |
10Мбит/с |
10Мбит/с |
||
|
|
|
|
|
Входное напряже- |
–15В … +15В |
–10В … +10В |
–7В … +12В |
|
ние приемника |
||||
Порог |
|
–200мВ … |
–200мВ … |
|
нечувствительно- |
–3В … +3В |
|||
+200мВ |
+200мВ |
|||
сти приемника |
|
|||
|
|
|
||
Входной импеданс |
3…7кОм |
4кОм. |
12кОм |
|
приемника |
||||
|
|
|
Из таблицы видны области применения последовательных интерфейсов. RS–232C целесообразно применять для подключения отдельных измерительных приборов к компьютеру, реализуя радиальную структуру ИС. Два других интерфейса применяют в модульных протяженных ИС промышленного типа, которые работают в условиях внешних помех. Использование RS–485 позволяет построить измерительную систему магистрального типа с достаточно высоким быстродействием на основе простой линии передачи информации. Системы такого типа с удаленными датчиками сбора информации широко применяют в ИС промышленной автоматики и сигнализации.
384
Приборный интерфейс GPIB
Широкое применение в измерительной технике нашел интерфейс, предложенный фирмой Hewlett-Packard (HP) в 1965 г. Его первое назва-
ние – Hewlett-Packard Interface Bus (HP-IB). В HP-IB были заложены прогрессивные технические принципы: достаточно высокая скорость передачи, приемлемое число приборов на шине, гибкость топологии системы, достаточно большие расстояния между приборами. В процессе стандартизации интерфейса в 1975 году он был переименован в GPIB (General Purpose Interface Bus) и в 1987 году стал стандартом
ANSI/IEEE 488.1. В дальнейшем стандарт был расширен в области программного обеспечения до версии 488.2. Интерфейс GPIB рекомендован к использованию Международной электротехнической комиссией МЭК 625.1 (International Electrotechnical Commission IEC 625.1). Анало-
гичный российский стандарт ГОСТ 26.003–80 использует для интерфейса GPIB название «канал общего пользования» (КОП). Часто его называют просто «приборный интерфейс».
Цели, которые ставили перед собой разработчики интерфейса – связать программируемую контрольно-измерительную аппаратуру с компьютером многопроводным магистральным каналом передачи информации. Интерфейс должен иметь:
•сравнительно высокую скорость передачи (до 1 Мбайт/с);
•параллельный обмен байтами данных;
•магистральный принцип построения ИС;
•приборно-модульный принцип агрегатирования ИС;
•простотуконструкции и легкость сборки ИС;
•дальность передачи данных единицы метров;
•лабораторные условия применения;
В результате реализация приборного интерфейса согласно стандарта 488.1 обеспечивает следующие технические параметры:
•общая длина линий интерфейса – до 20м;
•число подключаемых модулей, определяемое нагрузочной способностью шины (без расширителей шины) – не более 15;
•общее число адресуемых модулей не более 30 (при однобайтовой адресации);
•максимальная скорость передачи – 1 Мбайт/сек, реальная скорость составляет порядка 250...500 Кбайт/сек.
Измерительная система на основе интерфейса GPIB собирается соединением приборов и компьютера (контроллера) интерфейсными кабелями. Топология магистрали при этом может быть радиальной (звезда) (рис.16.8, а) или каскадной (рис.16.8, б).
385
1 |
DIO0 |
13 |
DIO4 |
2 |
DIO1 |
14 |
DIO5 |
|
|
||
3 |
DIO2 |
15 |
DIO6 |
4 |
DIO3 |
16 |
DIO7 |
5 |
EOI |
17 REN |
|
|
|
||
6 DAV |
18 DAV GND |
||
7 |
NRFD |
19 NRFD GND |
|
8 NDAC |
20 NDAC GND |
||
|
|
||
9 IFC |
20 IFC GND |
|
|
10 SRQ |
21 SRQ GND |
|
|
11 ATN |
23 ATN GND |
|
|
12 экран |
24 общий |
|
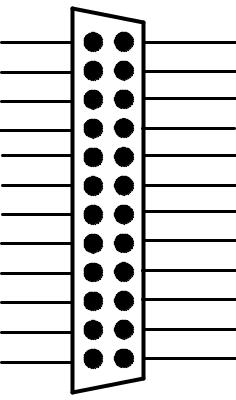
Рис. 16.10. Разъем интерфейсного кабеля GPIB
Магистраль GPIB одновременно может обслуживать до 15 модулей с адресами от 0 до 30 включительно. Стандарт GPIB определяет три различных типа модулей, которые могут быть подключены к шине. Это "listener" (слушатель, приемник), "talker" (передатчик, источник) и “controller” (контроллер, компьютер). Контроллер выполняет функции арбитра и определяет, какие из модулей в данный момент находятся в состоянии "talker" и "listener". Модуль в состоянии "listener" считывает сообщения с шины; модуль в состоянии "talker" посылает сообщения на шину. В каждый момент времени в состоянии "talker" может быть только одно устройство, в то время как в состоянии "listener" может быть несколько модулей.
Кроме магистрали, в аппаратную часть интерфейса входят аппаратнопрограммные блоки, расположенные в приборах – интерфейсные карты (ИКАР). Непосредственно с линиями магистрали соединены входные цепи приемопередатчиков (шинных формирователей) ИКАР. Следующий блок – это цифровые схемы кодирования и декодирования сигналов.
388
Здесь выделяют и формируют сигналы, используемые в блоках, реализующие интерфейсные функции. Под интерфейсной функцией в стандарте GPIB принято понимать совокупность операций при обмене данными (алгоритмы передачи и управления). Последний блок интерфейсной карты реализует приборные функции. Под ними понимают алгоритмы выполнения основных измерительных операций в конкретном приборе (например, масштабирование данных, запуск прибора на измерение и пр.). Они определяются разработчиком каждого прибора и не входят в стандарт GPIB.
Интерфейсныефункциистандартизованы. Наиболееважны 10 функций:
1.SH (Source Handshake) – функция согласования источника. Обеспечивает правильную передачубайта от источника данных;
2.AH (Acceptor Handshake) – функция согласования приемника (обеспечивает правильный прием байта данных);
3.T (Talker) – функция передачи данных;
4.L (Listener) – функция приема данных;
5.SR (Service Request) – асинхронный запрос на обслуживание от контроллера;
6.RL (Remote/Local) – включение/выключение ручного управления прибором с его передней панели;
7.SP (Serial Poll) –последовательный способ опроса приборов контроллером;
8.DC (Device Clear) –установка (сброс) прибора в исходное состояние;
9.DT (Device Triggered) – запуск прибора и реализация измерительной функции (например, начало измерений);
10.C (Controller) – функция контроллера.
Для конкретного прибора, в зависимости от его назначения, при проектировании ИКАР выбирают набор необходимых интерфейсных функций. Так, функция AH реализуется во всех приборах, так как она обеспечивает прием интерфейсных команд и адресацию. Функции SH и T могут отсутствовать, например, в генераторах сигналов, где не требуется передавать информации в другие модули ИС. Реализацию интерфейсных функций осуществляют как с использованием сигналов шин управления и синхронизации, так и путем передачи команд по шине данных.
Рассмотрим назначение линий шины управления интерфейса:
•ATN – Attention применяется для кодирования типа передаваемой информации. Контроллер устанавливает линию ATN в логическую 1 при посылке команд, и в логический 0, когда передаются данные.
•IFC – Interface Clear используется контроллером для инициализации шины (установка всех интерфейсных карт в исходное состояние).
389

•REN –Remote Enable переводит приборы в режим выполнения команд с шины (а не с передней панели прибора) и обратно. Используется в интерфейсной функции RL.
•SRQ – Service Request используется в функции SR для асинхронного запроса на обслуживание прибора контроллером. Эта функция будет рассмотрена далее.
•EOI – End of Identify – используется передатчиком для указания на последний байт составного сообщения.
Назначение сигналов шины синхронизации:
•DAV – Data Valid – устанавливается передатчиком при передаче данных;
•NRFD – Not Ready for Data устанавливается приемником при его неготовности;
•NDAC – Not Data Accepted – устанавливается приемником при отсутствии приема данных.
Алгоритм передачи байта по шине данных с использованием этих сигналов иллюстрируется на рис. 16.11.
DIO0..7
|
|
|
|
Байт данных |
|
|
|
|
|
|
6 |
1 |
|
|
2 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
0 |
DAV |
|
|
|
|
1 |
NRFD |
|
3 |
5 |
7 |
|
|
|
|
|
|
0 |
|
|
|
4 |
|
NDAC
1
0
Готовность |
|
Чтение |
|
Данные |
чтения |
|
данных |
|
приняты |
|
|
|
|
|
Рис. 16.11. Передача байта по шине GPIB 390
Исходное положение при передаче данных – все приемники выставляют нулевой сигнал NRFD (1). После этого передатчик устанавливает байт на шине данных и подтверждает его достоверность сигналом DAV = 1 (2). Приемник устанавливает сигнал неготовности к приему нового байта (3) и осуществляет прием текущих данных. Конец приема фиксируется установкой сигнала NDAC = 0 (4). После получения этого сигнала от всех приемников передатчик сбрасывает сигнал достоверности данных DAV = 0 (5) и снимает байт данных. Завершение передачи – восстановление приемником сигнала NDAC = 1. Система приходит в исходное состояние. Описанный алгоритм реализует интерфейсную функцию AH (синхронизация приемника) и функцию SH (синхронизация передатчика).
Управление передачей осуществляет контроллер, реализующий интерфейсную функцию C (Controller). В качестве контроллера может выступать компьютер с интерфейсной картой GPIB или предназначенный для этой цели интеллектуальный прибор. Операция назначения передатчика и приемников называется адресацией модулей (приборов). В одно и то же время могут быть адресованы один передатчик и несколько приемников. Для выполнения адресации каждый прибор в системе имеет свой уникальный номер, набираемый обычно на задней панели или сохраняемый в энергонезависимой памяти прибора. Адресное пространство интерфейса GPIB от 0 до 30 (то есть всего может быть адресован 31 прибор в системе).
Адресация производится путем передачи по шине данных байта команды интерфейса, передаваемого при установленном сигнале ATN =1. Это команда адресации №-го приемника MLA (My Listner Adress). Она имеет шестнадцатеричный код 20h+№ прибора. Команда адресации №-го передатчика (MTA – My Talker Adress) имеет шестнадцатеричный код 40h+№ прибора. Таким образом, код команды содержит номер адресуемого прибора.
Для реализации интерфейсных функций используют и другие команды интерфейса. Приведем наиболее важные:
•UNL, UNT – разадресация приемников и передатчиков;
•GET – запуск предварительно адресованного на прием прибора;
•SDS – сброс адресованного прибора;
•GTL – переход адресованного прибора на местное управление.
•DCL – сброс всех приборов;
•LLO – запирание местного управления увсех приборов;
•SPE, SPD – команды включения/выключения функции последовательного опроса;
391
Другой тип информации, передаваемой по шине данных – это последовательность байтов, представляющий собой одно или несколько информационных сообщений. Сообщение интерфейса GPIB – последовательность байтов данных, представляющая измерительную или управляющую информацию в виде текстовой строки, содержащей ASCII-коды цифр и букв. Сообщение завершается ограничителем строки (EOS –End of String). Обычно это код LF (0Ah). Внутри строки допускаются разделители (знаки запятой и точки с запятой). Концом серии сообщений является сигнал EOI, устанавливаемый передатчиком на соответствующей линии шины управления. Этот сигнал должен появляться одновременно с последним передаваемым байтом.
Описанный выше режим обмена информацией предполагает подчиненность приборов контроллеру и отсутствие обратной связи между ними. Между тем, очень важно эту связь иметь – например, для сигнализации о завершении измерений, сбоях в работе прибора и пр. Такую связь обеспечивает интерфейсная функция SR (запрос на обслуживание). В этом режиме прибор получает доступ к контроллеру, выставляя на линии SRQ сигнал единицы. Реакция контроллера (обработка ситуации запроса) включает следующие действия:
•контроллер приостанавливает текущие действия и переводит интерфейс в режим последовательного опроса – контроллер подает универсальную командуSPE;
•по команде SPE все приборы приостанавливают работу;
•контроллер последовательно назначает передатчиками все приборы. В режиме последовательного опроса приборы выдают на шину данных специальный байт состояния – STB. Формат байта позволяет закодировать информацию о состоянии прибора. Стандартом оговорено, что шестой бит равен 1, если прибор выставлял SRQ, иначе он равен нулю. Бит 4 используют для передачи от прибора сигнала "Занят/Готов", бит 5 рекомендован для индикации состояния прибора "Ненормальное/Нормальное" (например, переполнение или выход за пределы измерения);
•контроллер, последовательно опрашивая все приборы, выясняет, какой из них устанавливал сигнал запроса и в каком состоянии находится прибор. После выдачи байта состояния прибор сбрасывает сигнал SRQ;
•завершение режима последовательного опроса осуществляется сигналом SPD, подаваемым контроллером на все приборы.
Далее контроллер осуществляет действия, предусмотренные программой обработки запроса (например, получение от него результатов измерения, сброс прибора, переключение диапазона измерения).
Контроллеры GPIB для измерительных систем выпускают многие фирмы. Наиболее распространены платы контроллеров GPIB, встраивае-
392