10. Фотометрические датчики. Фоторезисторы.
Датчик – средство измерений, предназначенное для выработки сигнала измерительной информации в форме, удобной для передачи, дальнейшего преобразования, обработки или хранения, но не поддающейся непосредственному восприятию наблюдателя.
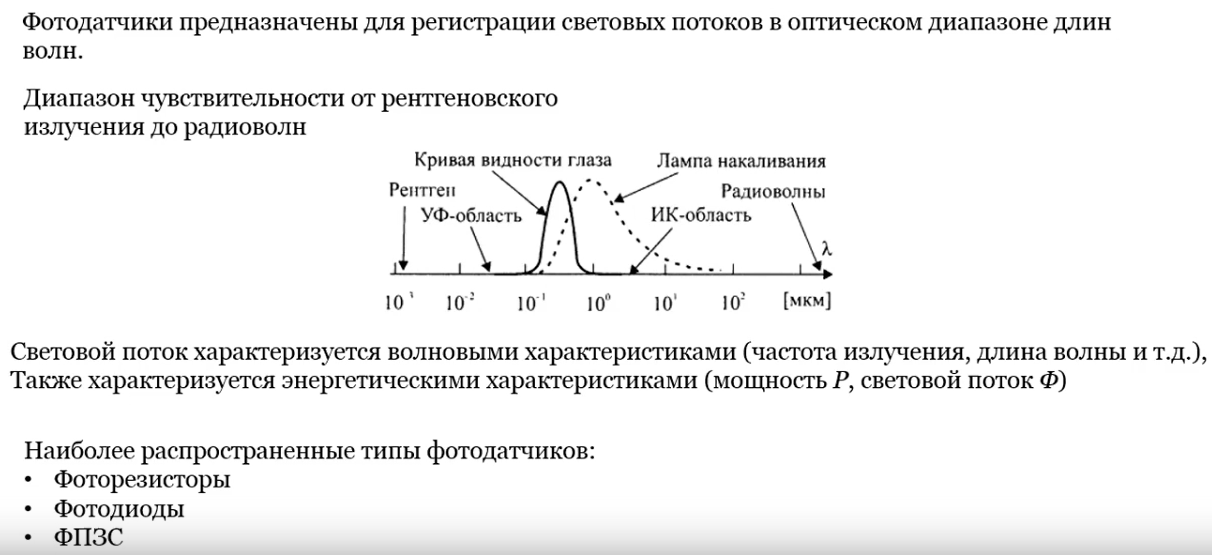
Фотоэлектрическими датчиками называют устройства, реагирующие на изменение освещенности. Они известны также как оптические бесконтактные выключатели и фотодатчики.

ФР являются параметрическими датчиками. Вольт-Амперная характеристика(ВАХ) нелинейная.
Выражение для ВАХ:
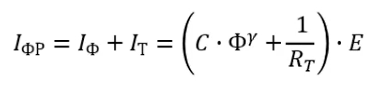
C
- коэффициент пропорциональности,
измеряется в Амперах / на Люмен на Вольт![]() .
.
Ф - световой поток в Лм.
степень 𝛾, зависит от того, из какого материала изготовлен фоторезистор и принимает значение от 0,5 до 1.
Значение Е, прикладываемое к фоторезистору, обычно в диапазоне от 10 до 100 В.

Если Ф0 равно нулю, то ВАХ - линейная.(соответствует обычному резистору).
Если вводим поток света(Ф1 и Ф2), то проводимость увеличивается у этого элемента, крутизна графика увеличивается.

Резистивный датчик у которого есть темновая составляющая 𝑅𝑇 и световая составляющая 𝑅Ф.
В зависимости от светового излучения, сопротивление датчика будет меняться

Передаточная
характеристика имеет вид функции
обратной пропорциональности: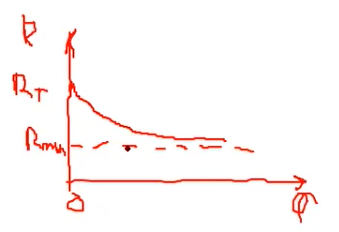
Rmin - асимптотическая линия.

11. Фотометрические датчики. Фотодиоды.
Фотоэлектрическими датчиками называют устройства, реагирующие на изменение освещенности.
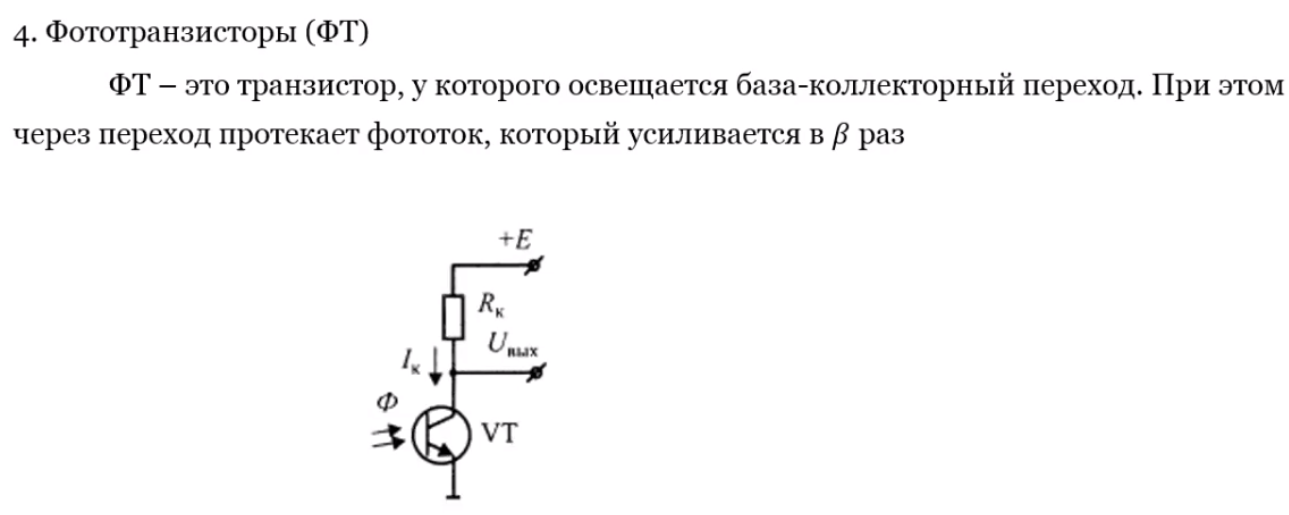
Разновидности:
Преимущества и недостатки:
лавинный фотодиод - высокие быстродействие и чувствительность, но нужно подать напряжение 100-200 В
фототранзисторы - высокая чувствительность, но зависимость от температуры
12. Инерциальные датчики. Акселерометры.
Лекция с начало до 55 минуты





13. Инерциальные датчики. Датчики угловой скорости.
Инерциальные датчики:
Акселерометр - датчик линейного ускорения. Измеряет проекцию вектора ускорения на ось чувствительности.
Гироскоп - устройство, способное индицировать, а также измерять изменение углов ориентации тела относительно инерциальной системы отсчета.
Акселерометр:
Область задач:
Измерение ускорения движения объекта
Измерение параметров вибрации
Измерение ударных нагрузок
Измерение углов наклона
Технологии изготовления:
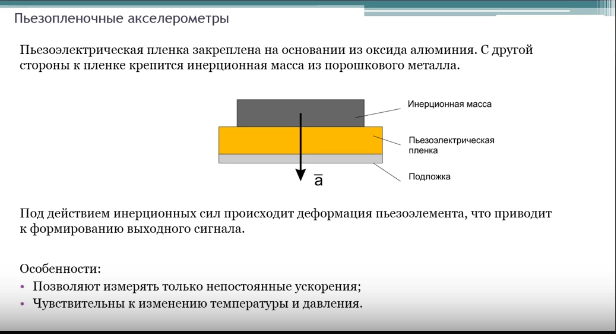
Пьезоплёночные
Интегральные объемной конструкции
Интегральные поверхностной конструкции
Тепловые
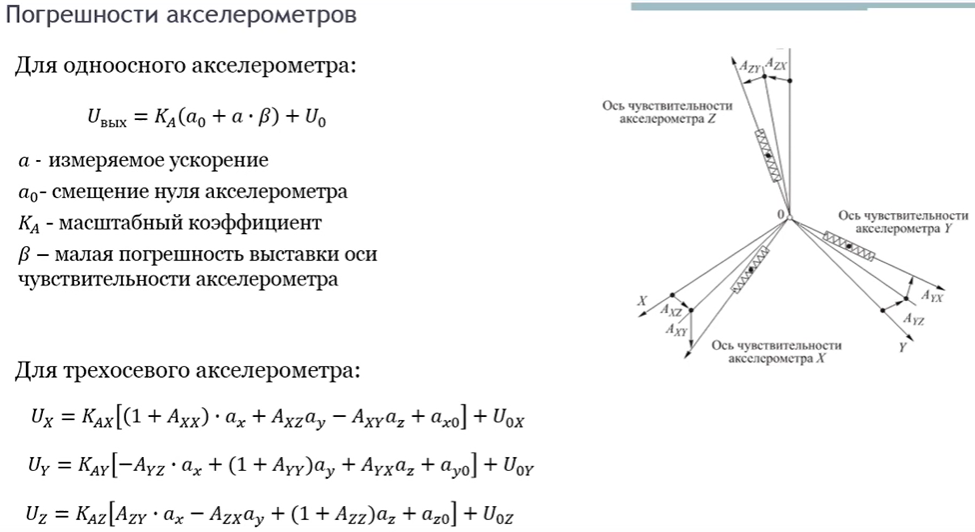
Основные параметры акселерометров:
Конструктивные:
Конструктивная схема
Количество измерительных осей
Предельные значения измеряемых ускорений
Возможность работы в статическом режиме
Показатели надежности
Электрические:
Вид выходной характеристики
Линейность выходной характеристики
Масштабный коэффициент
Смещение нуля
Постоянная погрешность в данном запуске
Повторяемость погрешности от запуска к запуску
Случайная погрешность
Коэффициент влияния внешних факторов
Не факт что это нужно, но все же оставлю, если кто-то вдруг захочет написать:
Гироскоп:
Среди гироскопов можно выделить два больших класса:
Астатические гироскопы Основная задача - хранить заданное направление. Характеризуются скоростью ухода от оси вращения [⁰/ч]
Датчики угловой скорости Характеризуются погрешностью измерения угловой скорости
Варианты исполнения ДСУ(датчиков угловой скорости):
Механические:
Камертонные
Дисковые вибрационные
Пьезоэлектрические
Оптические:
Волоконно-оптические (ВОГ)
Лазерные
ДСУ:
Механические:
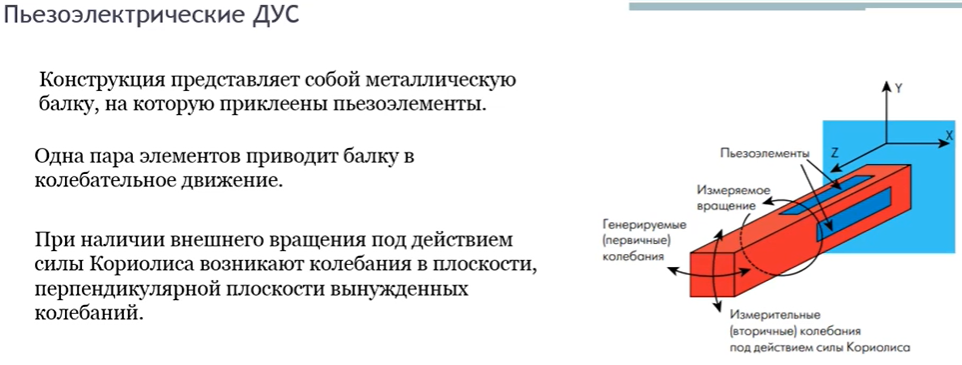
Вначале рисуем рисунки, потом пишем текст под скрином, потом формулы со скрина
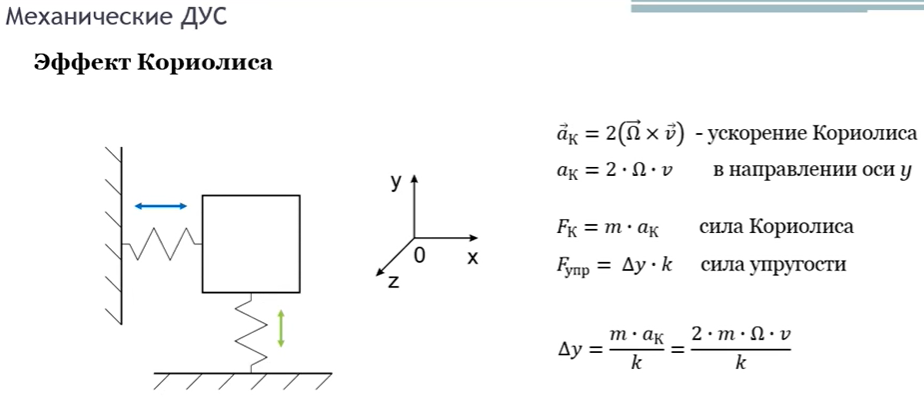
Это обязательно пишем, тут объяснение эффекта Кориолиса
У нас есть некоторый груз, который закреплен на двух пружинах к двум перпендикулярным плоскостям. Этот груз мы некоторым образом приводим в движение вдоль оси X (груз колеблется влево, вправо вдоль оси X). Дальше мы начинаем вращать груз относительно оси Z(ось Z смотрит на нас на рисунке). В результате вращение груза относительно оси Z, мы начнем наблюдать колебания нижней пружины.
Камертонный гироскоп:
Я хз надо ли рисовать такие рисунки, как бы это не просто, по идеи названия и описания действия должно хватить, но не уверен, поэтому каждому на свое усмотрение
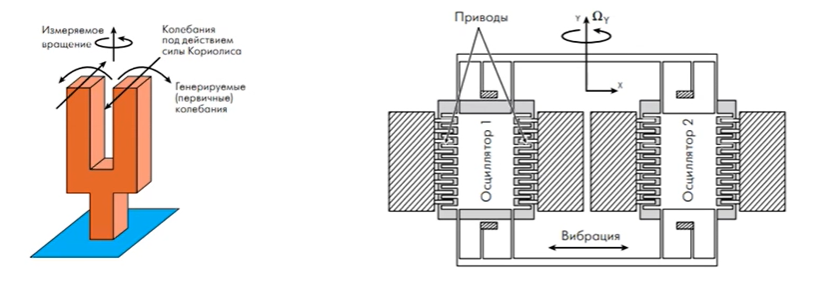
Левый рисунок:
Если мы начнем вращать камертон вокруг его оси, то мы сможем наблюдать генерируемые колебания под действием силы Кориолиса. Знак ускорения зависит от направления вращения.
Правый рисунок:
В датчиках угловой скорости это используется следующим образом. На кристалле микросхемы устанавливается два осциллятора, которые приводятся в движение электростатическими силами. Система приводится во вращение вдоль оси Х, осциляторы начинают колебатся вдоль оси Z. Дальше нам необходимо с помощью датчиков отслеживать эти колебания.
Вибрационные:
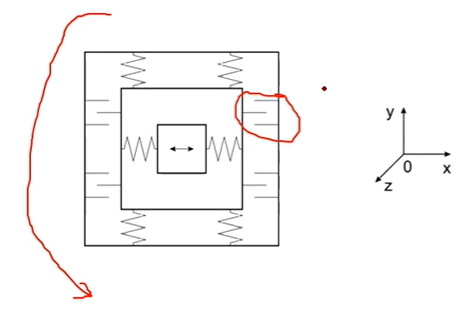
У нас есть некоторый грузки, который находится в рамке и закреплен на пружинах. Этот груз приводится в движение за счет электростатических сел(в корпусе датчика есть некая система электродов, которая притягивает грузик то влево, то вправо). Груз периодически, с определенной частотой совершает колебательное движение вдоль оси X. Если мы начнем вращать данную систему, относительно оси Z(ось Z смотрит на нас на рисунке), то пружины, удерживающие корпус внутри которого находится грузик, тоже начнут совершать колебательные движения, величину этого линейного перемещение мы отследим с помощью датчиков(дифференциальные датчики емкости)(4 фигни из трех палок на рисунке) и таким образом сможем сказать какое ускорение мы получили.
Если на датчик подействует какое-то ускорение(произошла перегрузка). Тогда вся наша конструкция отклонится в какую-то сторону. И это может дать ошибочные данные о угловой скорости, так как еще никакого вращения не происходило.

В таком случае датчик размещают не один, а несколько (две штуки). Грузики внутри колеблются в противофазе. Мы начинаем вращать(ось Z, относительно которой вращаем, смотрит на нас). Тогда у нас одна рамка будет двигаться вверх, а другая вниз и мы сможем определить, что у нас идет угловое вращение, а не ускорение. Если бы у нас действовало просто ускорение, обе рамки двигались в одну и ту же сторону.
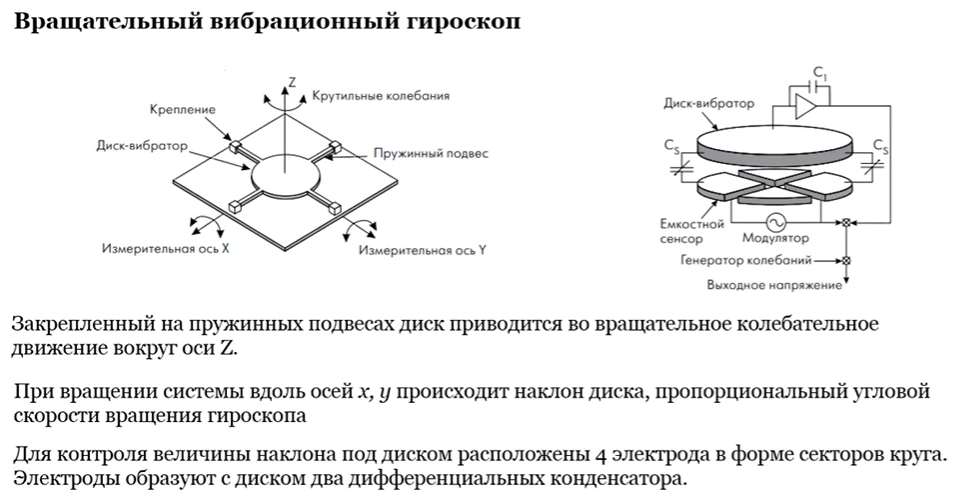
Вращательный вибрационный гироскоп:
Можно нарисовать только левый рисунок схематично и текст написать
Пьезоэлектрические: