

2.За завданням викладача для кожного з досліджуваних тіл (куля, циліндр та ін.) провести по 5-9 дослідів. Визначити час скочування кожного тіла.
3.Виміряти довжину похилої площини і її висоту.
4.Зважити досліджувані тіла і зробити необхідні виміри їх геометричних розмірів. Дані усіх вимірів занести в табл.2.3.1.
Обробка результатів експерименту
1.За формулою (2.3.11) обчислити момент інерції досліджуваних тіл за результатами експерименту.
2.За формулами (1.45 – 1.52) для відповідних тіл обчислити теоретичне значення їх моментів інерції.
3.Порівняти результати теоретичних обчислень та зіставити їх із результатами експерименту. Зробити висновки.
4.Обчислити абсолютну і відносну похибки експерименту.
Контрольні питання
1.Момент інерції твердого тіла. Кінетична енергія поступального та обертового рухів твердого тіла. Закон збереження енергії в механіці. Консервативні та дисипативні сили (с. 18 -21, 9-11).
2.Обчислення моментів інерції деяких тіл (однорідний стержень, диск, диск із центральним отвором, обруч, куля). Теорема Штейнера (с. 18-21, 23).
3.Експериментальні методи визначення моментів інерції твердих тіл (с. 35-38).
4.Вивести робочу формулу для визначення моменту інерції тіла при допомозі похилої площини (с. 35-37).
5.Момент сили. Рівняння моментів. Момент імпульсу. Закон збереження моменту імпульсу. Гіроскопи. Основне рівняння динаміки обертового руху (с.16-18, 23-24) .
39

 Тіло
Тіло 
Куля
з отвором Циліндр
Циліндр
Тіло
Куля
|
|
|
|
|
|
|
|
Таблиця 2.3.1 |
|
№ |
m, |
h, |
S, |
t, |
Iексп, |
R, |
r, |
Iтеор, |
e, |
досл. |
кг |
м |
м |
с |
кг×м2 |
м |
м |
кг×м2 |
% |
1 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
С. зн. |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
С. зн. |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
С. зн. |
|
|
|
|
|
|
|
|
|
№ |
m, |
h, |
t, |
Iексп, |
R, |
r, |
Iтеор, |
e, |
досл. |
кг |
м |
с |
кг×м2 |
м |
м |
кг×м2 |
% |
1 |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
С. зн. |
|
|
|
|
|
|
|
|
40
Циліндр з отвором Циліндр
1
2
3
4
5 С. зн. 1
2
3
4
5 С. зн.
41
Лабораторна робота 1.4 Визначення моменту інерції маховика
Мета роботи. Вивчення закону збереження механічної енергії шляхом визначення моменту інерції маховика.
Прилади і матеріали. 1. Маховик. 2. Секундомір. 3. Терези.4. Лінійка з міліметровими поділками. 5. Тягарець. 6. Штангенциркуль.
Теоретичні відомості та опис лабораторної установки
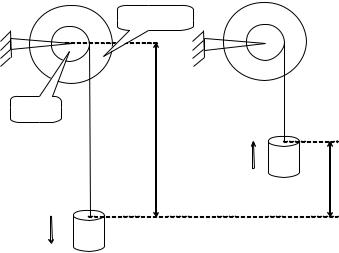
Установка для визначення моменту інерції маховика складається з маховика та шківа , які насаджені на вал (рис. 2.4.1). Вал закріплений у двох підшипниках. На шків намотують нитку і до кінця її прикріплюють тягар масою m. Падаючи, тягар надає рівноприскореного обертання шківу, а через нього – валу й маховику.
Маховик
Шків
h
V m
h1
V m
Рис. 2.4.1
Потенціальна енергія тягаря при цьому перетворюється в кінетичну енергію поступального руху тягаря, кінетичну енергію
42
обертального руху маховика і витрачається на перемагання сил тертя (кінетичною енергією обертального руху шківа з валом нехтуємо, адже вона мала порівняно з попередніми складовими).
Кінетична енергія поступального руху тягаря та кінетична енергія обертального руху маховика визначаються за формулами:
W |
= |
mV |
2 |
|
, |
(2.4.1) |
|
|
|
|
|
||||
k (ï î ñò ) |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
||
W |
= |
|
Iω |
2 |
. |
(2.4.2) |
|
|
|
|
|||||
k (об) |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
||
Робота, що затрачається на перемагання сил тертя, при одному оберті маховика нехай складає А, а робота за кілька обертів AЧn1
(де п1 – кількість обертів маховика, які він зробив під дією тягаря).
Отже, для даної системи можна застосувати закон збереження механічної енергії, враховуючи при цьому втрати механічної енергії на роботу проти сил тертя:
mgh = |
mV 2 |
+ |
Iω |
2 |
+ An1 . |
(2.4.3) |
2 |
2 |
|
||||
|
|
|
|
|
Момент інерції маховика можна визначити за допомогою описаної установки двома методами.
І метод. Нитка не прикріплена до шківа. У момент, коли тягар повністю опустився, нитка спадає і шків, продовжуючи обертатись, робить n2 обертів, поки повністю не зупиниться. За цей час за рахунок кінетичної енергії обертального руху маховика, яку він мав у момент спадання нитки, виконується робота, спрямована на перемагання сили тертя, що дорівнює:
An2 |
= |
Iω |
2 |
, |
(2.4.4) |
2 |
|
||||
|
|
|
|
|
звідки
43

A = Iω 2 . 2n2
Підставивши (2.4.4, 2.4.5) у (2.4.3), дістанемо:
|
|
mgh - |
mV 2 |
|||||
I = |
|
2 |
|
|
||||
|
|
|
|
|
. |
|||
ω 2 |
æ |
|
|
n |
ö |
|||
|
|
|
ç |
1 |
+ |
1 |
÷ |
|
|
|
|
|
|||||
2 |
ç |
|
|
n2 |
÷ |
|
||
è |
|
|
ø |
|
||||
(2.4.5)
(2.4.6)
Виразимо лінійнуV і кутову ω швидкості через вимірювані в досліді величини – висоту падіння тягаря h і час його падіння t:
V = |
2h |
; |
(2.4.7) |
||
|
t |
||||
|
|
|
|
|
|
ω = |
|
2h |
|
, |
(2.4.8) |
|
rt |
|
|||
|
|
|
|
|
|
де r – радіус шківа.
Замінивши V і ω у (2.4. 6) через їх значення (2.4.7) і (2.4.8), знайдемо:
I = |
mr 2 |
(gt 2 |
- |
2h) |
|
||
|
æ |
|
n |
ö . |
(2.4.9) |
||
|
|
|
|||||
|
2hç |
1 + |
1 |
|
÷ |
|
|
|
|
|
|
||||
|
|
ç |
|
n2 |
÷ |
|
|
|
|
è |
|
ø |
|
||
ІІ метод. Нитка прикріплена одним кінцем до шківа. Коли тягар повністю опуститься, маховик, продовжуючи обертатись за інерцією, підніме тягар на висоту h1 < h. При цьому система набуде потенціальної енергії
WП = mgh1 . |
(2.4.10) |
Різниця потенціальних енергій системи до досліду і після |
|
досліду дорівнюватиме роботі на перемагання сил тертя: |
|
mgh — mgh1 = Fh + Fh1, |
(2.4.11) |
де F – сила тертя. |
|
Із (2.4.11) маємо:
44