

Датчики
В начале главы 2 мы определили (измерительный) сигнал как энергетическое физическое явление, несущее информацию. Предполагается, что такой сигнал относится к соответствующей области физики или к ее определенному разделу. Например, механический, тепловой, электрический и магнитный сигналы принадлежат каждый к своей собственной соответственной физической области. Чтобы обеспечить перенос из одной физической области в другую (см. главу 1), должна существовать возможность отображать сигналы из одной физической области на сигналы из другой области. Такое отображение осуществляют «преобразователи», которые способны энергетическое физическое явление одного рода (из одной области) преобразовывать в явление другого рода (в другой области). При преобразовании должна сохраняться информация, содержащаяся в исходном энергетическом явлении. Такие сохраняющие информацию энергетические преобразователи называют измерительными датчиками.
Кроме отображения сигналов, принадлежащих различным областям, друг на друга, необходимо также иметь возможность отображать друг на друга сигналы из одной и той же области. В этом случае энергетическое явление преобразуется в подобное ему энергетическое явление с сохранением соответствующей информации, содержащейся в исходном явлении. Может понадобиться увеличить мощность явления (усиление мощности), или опустить какую-то ненужную информацию (фильтрация). Такие преобразователи мы подробно рассмотрим в параграфе 3.3, где речь пойдет об электронной обработке сигналов.
Происходящие в веществе физические эффекты, используемые для отображения сигналов из различных областей называют эффектами переноса, тогда как для отображения сигналов в пределах одной области используются происходящие в веществе эффекты, называемые прямыми. Вот примеры эффектов переноса: из электрической области в тепловую — эффект Пельтье; из тепловой области в электрическую — эффект Зеебека; из магнитной области в электрическую — эффект Холла. Примеры прямых эффектов, происходящих в веществе: в электрической области — электрическое сопротивление; в механической области — упругость.
В отношении свойства датчиков преобразовывать энергию различают два типа датчиков: пассивные и активные.
Пассивными являются такие датчики, которые функционируют без потребления энергии от вспомогательного источника (см. рис. 2.68(а)). Средняя
мощность сигнала на выходе Ро является частью средней мощности Рр отдаваемой измеряемым объектом Однако физически реализуемое преобразование энергии всегда сопровождается потерями (мощности Р), поэтому:
Рi=Р0+Рl.
Возможно, в принципе, накопление энергии в датчике на короткое время. Следовательно, приведенное выше соотношение справедливо только для значений, являющихся результатом усреднения на протяженном интервале времени. Когда измеряемый объект нельзя сильно нагружать, то есть он может отдавать лишь очень малую входную мощность, существенным становится коэффициент полезного действия (кпд) η пассивного датчика:
![]()
Конечно, кпд процесса преобразования не так важен в случае, когда на входе имеется большая мощность Все механические вольтметры, амперметры и ваттметры являются примерами этого класса пассивных датчиков В них электрическая энергия преобразуется в механическую энергию в форме потенциальной энергии сжатой пружины подвижной системы измерительного прибора.
Активными являются такие датчики, которым требуется вспомогательный источник питания (см рис. 2.28(b)). Выходная мощность датчика Р0 почти полностью берется из этого вспомогательного источника питания, отдающего мощность Рps. Мощность, которую отдает измеряемый объект, практически равна нулю. Требуется лишь совсем малая мощность Рc, чтобы управлять выходной мощностью датчика (на рис. 2.68(b) этот процесс преобразования схематически изображен в виде заслонки). Подавая мощность от вспомогательного источника можно реализовать датчики с усилением, обладающие очень высокой чувствительностью.
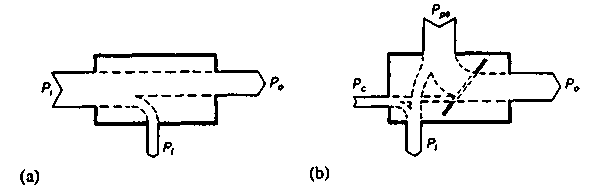
Рис. 2.68. Пассивный и активный датчики Рi — мощность на входе, Р0 — мощность на выходе, Рl — мощность, которая теряется в процессе преобразования, Рc — мощность управляющего воздействия, Рpc — мощность вспомогательного источника (а) Пассивный датчик. (b) Активный датчик.
Как уже говорилось, во многих измерительных системах используются датчики, преобразующие неэлектрические сигналы в электрические, поскольку обработка и передача сигналов в электрической области сравнительно просты. Поэтому мы ограничим наше рассмотрение датчиками, которые отображают сигналы из различных физических областей на сигналы в электрической области, а также обратными преобразователями, которые переводят электрический сигнал в неэлектрическую величину. Датчики первой категории нужны на входе измерительной системы. Поэтому они называются входными или измерительными датчиками. Обратные преобразователи нужны на выходе измерительной системы для целей индикации и регистрации данных или для управления другими процессами. Поэтому их называют выходными датчиками или исполнительными механизмами.
К сожалению, не существует единой терминологии в мире датчиков. Их называют по разному: сенсор, чувствительный элемент, измерительный преобразователь (transducer, sensor, pick-up, gauge). Классификацию датчиков часто производят по той величине, которая измеряется с их помощью (датчик смещения, акселерометр, тензодатчик и т. д.), или по принципу действия (емкостной датчик смещения, пьезоэлектрический акселерометр, резистивный тензодатчик и т. д.). В параграфе 3.2 рассматривается ряд простых, но широко применяемых датчиков.