

2.3.3.2 Характеристики измерительных систем
Мы рассмотрим здесь несколько характеристик измерительных систем, которые могут влиять на правильность результата измерения. Если один или большее число параметров, отражающих эти характеристики, не соответствуют требуемым (или заданным) значениям, то при измерении будут происходить ошибки.
Чувствительность
Чувствительность S (линейной) измерительной системы — это отношение величины выходного сигнала у к величине входного сигнала х
![]()
![]()
Ч увствительность
измерительной системы, вообще говоря,
зависит от частоты:S
=S().
увствительность
измерительной системы, вообще говоря,
зависит от частоты:S
=S().
Чувствительность измерительного усилителя обычно называют усилением, тогда как в отношении (измерительных) систем в общем случае говорят о передаточной функции. Помимо чувствительности иногда используют масштабный коэффициент W, равный, по определению,
Вот пример. Высота сетки на экране осциллографа равна 8 см. Электронный луч отклоняется на всю высоту сетки при наличии на входе осциллографа сигнала с полным размахом 40 мВ. Следовательно, чувствительность S составляет 0,2 см/мВ, а масштабный коэффициент W равен 5 мВ/см. Именно масштабный коэффициент, как правило, бывает указан для осциллографов.
Когда передаточное соотношение у = f(х), связывающее выходной сигнал у (отсчет) и входной сигнал х (величину, которая должна быть измерена), является нелинейным, нельзя говорить о чувствительности, так как отношение выходного сигнала у ко входному сигналу x: меняется в зависимости от величины х. Для таких нелинейных систем мы введем дифференциальную чувствительность. По определению, дифференциальная чувствительность Sdiff измерительной системы, описываемой соотношением у = f(x), при входном сигнале х0 равна
![]()
В случае линейной системы Sdiff ≠ Sdiff (x0) и Sdiff = S . У нелинейной системы Sdiff зависит от значения входного сигнала х.
Возьмем, например, нуль-детектор с передаточной функцией у = ах — Ьх3, где а > О и b > 0. Дифференциальная чувствительность такого устройства уменьшается с ростом входного сигнала. Для нуль-детектора особенно важно, чтобы дифференциальная чувствительность была высокой при очень малых входных сигналах. Чем больше Sdiff (0), тем лучше можно обнаружить выполнение нулевого условия и тем более точным может быть измерение.
Д ругой
мерой чувствительности нелинейной
системы служиткоэффициент
чувствительности. Для
измерительной системы с сигналом х
на
входе и сигналом
у
на
выходе (с передаточным соотношением у
= f(x))
коэффициент
чувствительности
определяется
как
ругой
мерой чувствительности нелинейной
системы служиткоэффициент
чувствительности. Для
измерительной системы с сигналом х
на
входе и сигналом
у
на
выходе (с передаточным соотношением у
= f(x))
коэффициент
чувствительности
определяется
как
Само обозначение указывает на то, что данный множитель характеризует чувствительность у к изменениям в х В случае линейной системы Sx является плохой мерой чувствительности, так как Sx = 1 , какой бы ни была величина S.
Мы уже имели дело с коэффициентами чувствительности при обсуждении вопроса о распространении ошибок измерения (раздел 2.3.2). Другим примером использования коэффициента чувствительности в метрологии является тензодатчик. В этом датчике происходит преобразование изменения длины Δl в изменение сопротивления ΔR Коэффициент чувствительности тензодатчика Sl равен
![]()
Отметим, что введенная выше чувствительность системы S является безразмерной только в том случае, когда у и х имеют одинаковую размерность. Это никогда не выполняется, например, в случае датчиков. У дифференциальной чувствительности Sdiff та же размерность, что и у чувствительности S. Однако, коэффициент чувствительности всегда безразмерен.
Порог чувствительности
Невозможно увеличивать чувствительность измерительной системы до бесконечности (например, путем увеличения коэффициента усиления): идя по этому пути, мы столкнемся с порогом чувствительности.
Порог чувствительности измерительной системы определяется как наименьший входной сигнал, который все еще обнаруживается с заданной вероятностью правильного решения. Порог чувствительности препятствует обнаружению нами сколь угодно малых сигналов. Это обусловлено тем, что во всякой реализуемой физической системе имеются спонтанные, случайные флуктуации (шум), из-за которых малый по величине измеряемый входной сигнал «тонет» в этом (образующем фон) шуме. Шум в измерительной системе может быть обусловлен многими причинами, такими как тепловые колебания (шум резистора) или квантовый характер потока зарядов, масс или носителей энергии через потенциальный барьер (дробовой шум электронов, ионов или фотонов).
Помимо принципиально неизбежных флуктуационных шумов в измерительной системе существуют и другие источники возмущений, которые могут затемнять полезный сигнал. Например, механические вибрации или электрические наводки могут давать настолько большой сигнал на выходе, что слабые сигналы, действующие на входе, уже нельзя обнаружить. Такие механические дефекты как трение, люфт или наличие мертвой зоны могут приводить к тому, что входной сигнал ниже определенного порога чувствительности не будет приводить к появлению сигнала на выходе. Часто простым изменением конструкции измерительной системы эти нефундаментальные ограничения можно устранить.
Принципиальный предел чувствительности системы определяется случайными флуктуациями внутри этой системы и является существенной характеристикой. В измерительной системе всегда присутствует шум, и он определяет теоретически осуществимый порог чувствительности.
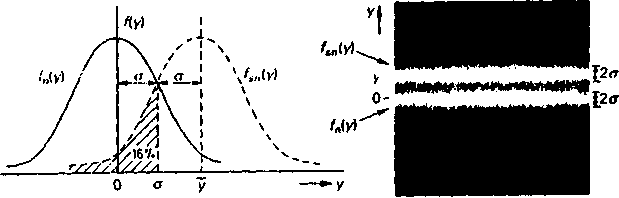
Мы рассмотрим вопрос о пороге чувствительности шумящей измерительной системы в предположении, что измеряемая величина х остается постоянной. Пусть шум имеет гауссово распределение. Тогда при х = 0 выходной сигнал будет обладать плотностью распределения fn(x) с у = 0 (см. рис. 2.28). Если ко входу приложен сигнал х ≠ 0, то выходной сигнал будет складываться из желаемого сигнала у и (того же самого) шума. Плотность распределения в этом случае обозначим fsn(y).
Теперь перед нами стоит важный вопрос: какой величины сигнал х можно обнаружить? Другими словами, при каком значении y мы все еще можем отличить наблюдаемую ситуацию от случая, соответствующего x = о и, следовательно, у = 0 ?Ответ на этот вопрос зависит от степени определенности, с какой мы хотим знать, спрятан в шуме полезный сигнал или его нет. В постановке задачи нетрудно разобраться, следуя приводимым ниже рассуждениям. Предположим, что среднеквадратическое значение шума на выходе σ (стандартное отклонение распределения fn(y)) равно n-й части выходного сигнала у . В силу того, что плотность распределения вероятностей
(b)
Рис.2.28. Порог чувствительности измерительной системы, подверженной действию шума, (а) Плотность распределения вероятностей для сигнала на выходе системы в отсутствие сигнала на входе (fn(у)) я при его наличии (fsn(y)). (b) Выходной сигнал как функция времени в случае, когда сигнала на входе нет (х = 0), и в случае, когда на входе действует сигнал, вызывающий появление на выходе постоянного напряжения у .
fn(y) является четной функцией, мы можем ввести критерий обнаружения, основанный на том, что фактическое значение выходного сигнала у больше или меньше, чем 0,5 у. Представим себе, что у- это выборочное значение выходного сигнала. Тогда нам необходимо иметь возможность сделать вывод о наличии сигнала у на основе единственной выборки у. (Когда мы можем позволить себе отложить принятие решения и взять среднее от нескольких выборок, это фактически означает осуществление низкочастотной фильтрации. В этом случае вероятность обнаружения значительно возрастает, так как увеличивается эффективное отношение сигнал/шум.) Если у > 0,5у, то мы делаем вывод, что сигнал на входе присутствует, а если у < 0,5 у, то мы принимаем решение об отсутствии сигнала на входе. На рис. 2.28(b) показан случай, когда берется большое число выборок, как при наличии входного сигнала, так и в его отсутствие. Здесь п примерно равно 3 (у = Зσ). При n=2 темная полоска между двумя изображениями выходного шума на экране осциллографа исчезает. В последнем случае мы уже не можем четко различать эти два изображения; на рис. 2.28(а) показаны соответствующие плотности распределения. Что значит надежность обнаружения в этом случае? Как можно видеть из графика на рис. 2.28(а), при у = 2σ (п = 2) (согласно критерию обнаружения, при котором происходит сравнение со значением 0,5 у) заключение, что «входного сигнала нет», будет ошибочным для 16% выборок. Это в точности та часть всей площади под fsn(y), которая заштрихована. Поэтому доля случаев, в которых обнаруживается входной сигнал, порождающий выходной сигнал у = 2 , составляет 84%. Следовательно, с достоверностью 84% можно обнаруживать маскируемое шумом постоянное напряжение, когда среднеквадратическое значение шума равно половине значения этого постоянного напряжения (п =2). Отношение сигнал/шум в данном случае составляет (пσ)2/σ2 = п2 = 4 Это рассуждение показывает, что желаемая степень надежности определяет порог чувствительности (значение п).
В табл. 2.3 приведена достоверность или вероятность обнаружения сигнала на входе по критерию y > 0,5 y , вычисленная для нескольких значений у .
Табл. 2.3. Вероятность обнаружения и отношение сигнал/шум для различных значений сигнала у в зависимости от соотношения между стандартным отклонением σ и величиной сигнала.
|
Сигнал у |
Вероятность обнаружения |
Отношение сигнал/шум |
|
1 σ |
69,15% |
1 |
|
1,4 σ |
76,11% |
2 |
|
2 σ |
84,13% |
4 |
|
3 σ |
93,32% |
9 |
|
4 σ |
97,72% |
16 |
|
5 σ |
99,38% |
25 |
|
6 σ |
99,87% |
36 |
|
8 σ |
99,9968% |
64 |
|
10 σ |
99,999971% |
100 |
Общепринятой мерой порога чувствительности является величина входного сигнала, для которого отношение сигнал/шум равно единице. Тогда, в случае шума с нормальным распределением мгновенных значений, вероятность обнаружения оказывается равной примерно 70%.
В![]() приведенном рассмотрении мы хотели
выносить решение о наличиисигнала
на входе по одному единственному
выборочному значению или измерению.
Порог чувствительности улучшается,
когда мы выносим решение на
основании нескольких (скажем, п)
выборок.
Как мы уже видели,
приведенном рассмотрении мы хотели
выносить решение о наличиисигнала
на входе по одному единственному
выборочному значению или измерению.
Порог чувствительности улучшается,
когда мы выносим решение на
основании нескольких (скажем, п)
выборок.
Как мы уже видели,
где - среднеквадратическое значение шума, a σavg - стандартное отклонение среднего от п выборок. Таким образом, в результате усреднения отношение сигнал/шум увеличивается в п раз и порог чувствительности соответственно снижается.
Порог чувствительности можно также улучшить, сужая ширину полосы В измерительной системы. В предположении, что шум белый, находим его среднеквадратическое значение σ.
![]()
где а0- эквивалентный шум в полосе 1 Гц. Это означает, что с сокращением полосы В измерительной системы в какое-то число раз, во столько же раз увеличивается отношение сигнал/шум. Соответственно этому снижается порог чувствительности.
В качестве альтернативы нахождению среднего от п отдельных последовательных
выборок мы можем также измерять входной сигнал x(f) непрерывно в течение определенного времени Т.
Среднее по времени значение уavg выходного сигнала измерительной системы y(t) на интервале (t, t + Т) равно:
![]()
Теперь можно воспользоваться этим средним, чтобы установить, имеется сигнал на входе или его нет. Чтобы определить результирующее улучшение порога чувствительности, применим теорему Шеннона о выборках, которая звучит так: если у сигнала y(f) нет составляющих на частотах выше, чем В Гц, то этот сигнал полностью определяется выборками, взятыми с интервалом 1 / 2В секунд на отрезке времени Т, много большем чем 1 / В. Число дискретных выборок, описывающих y(t) на отрезке Т секунд, равно 2ТВ. Возьмем среднее от этих 2ТВ выборок. Среднеквадратическое значение шума в сигнале y(t) равно σ = σ 0√B. Таким образом, стандартное отклонение σavg среднего по выборкам из сигнала y(t) на протяжении Т секунд имеет вид:
![]()
Следовательно, вычисление среднего на интервале времени Т приводит к увеличению отношения сигнал/шум в 2T раз; порог чувствительности снижается в √2Т раз
Подводя итоги, мы можем утверждать, что порог чувствительности — это наименьший сигнал, который можно обнаружить с определенной степенью достоверности на фоне собственного шума измерительной системы. Порог чувствительности зависит от требуемой достоверности и величины шума в измерительной системе. Шум можно уменьшить, применяя измерительную систему с меньшей шириной полосы или вычисляя среднее для ряда выборочных значений, полученных в результате измерений, а также путем нахождения среднего по времени при непрерывном измерении на интервале времени Т. Все эти меры требуют затраты большого времени для получения результата; как следствие их применения, отклик измерительной системы становится более медленным, и это является платой за снижение собственного порога чувствительности измерительной системы.
Чувствительность к форме сигнала
Сигнал на входе измерительной системы служит носителем информации о значении физической величины, которая должна быть измерена. Отклик системы на входной сигнал в общем случае зависит от формы (вида или структуры) этого входного сигнала.
Часто классификацию сигналов проводят по следующим признакам. Сигнал может быть константой, то есть не зависеть от времени (статический сигнал), например, постоянное напряжение или постоянный ток. Обычно сигнал изменяется, но только очень медленно; такой сигнал называют квазистатическим. Однако не менее часто сигнал является функцией
времени (динамический сигнал). Если сигнал x(t) повторяется во времени каждые Т секунд, то он называется периодическим сигналом с периодом T (для всех t x(t) = x(t +T); см. рис. 2.29(а)). Частота повторения равна f = 1 / Т. Отношение Δt/T для импульсных сигналов (см. рис. 2.29(b)), по определению, представляет собой коэффициент заполнения. Сигналы с очень малым коэффициентом заполнения (импульсы) измерять трудно, и часто они являются причиной сильных наводок на соседние измерительные устройства. Когда зависящий от времени сигнал не является периодическим, его называют одиночным сигналом (одиночной реализацией) или неустановившимся сигналом (переходным процессом). Примерами таких сигналов служат шумовые напряжения и переходные явления, такие как выбросы или звон (затухающие колебания) в системах с переключениями. Как правило, периодические сигналы легче измерять, чем непериодические. В частности, поэтому при исследовании переходной характеристики системы условия ее воспроизведения повторяют многократно, получая, таким образом, более легкий для измерения периодический сигнал.
Динамический сигнал можно анализировать как во временной области, так и в частотной области. Наблюдение структуры колебания, например, с помощью осциллографа, осуществляется во временной области, тогда как частотное наполнение (свойства) изучают с помощью спектроанализатора в частотной области.
Следовательно, для однозначного определения того, что такое «чувствительность измерительной системы» в случае динамического сигнала необходимо установить, на какую характеристику сигнала реагирует наша измерительная система. Другими словами: значение какого параметра сигнала измеряется! Применительно к динамическому измерительному сигналу x(t) можно указать следующие характерные значения:
Пиковое значение хр:
хр = max|x(t)|.
Полный размах хрp:
хрр = max {x(t)} - min {x(t)}.

Рис 2 29 Периодические сигналы (а) Сложный периодический сигнал общего вида (Ь) Импульсный сигнал с коэффициентом заполнения ΔT/T = 1/7
Целесообразно как можно реже использовать пиковое значение и полный размах, так как оба они очень чувствительны к возмущениям типа шума, накладывающегося на полезный сигнал. Большие ошибки в xp и xpp возникают также из-за нелинейных искажений сигнала. Значительно менее чувствительными к искажениям и помехам являются следующие параметры сигнала:
С![]() реднее
по времени значениехavg
:
реднее
по времени значениехavg
:
Среднее значение периодического сигнала находят на интервале времени, в который укладывается целое число периодов: Т = п/f, п — целое. Среднее значение синусоидального сигнала равно нулю.
Среднее значение от абсолютной величины |x|avg
![]()
Когда говорят о среднем значении синусоидального сигнала, обычно имеют в
виду среднее значение абсолютной величины синусоидального колебания. - Действующее значение xRMS

Сейчас будет показано, что применение действующего значения в качестве характеристики измерительного сигнала полезно. Мгновенная мощность p(t), рассеиваемая на резисторе R приложенным к нему измерительным
сигналом x(t), равна
![]()
Здесь i(t) — ток, текущий по резистору R Средняя мощность, рассеиваемая на резисторе за время Т, равна
![]()
Cледовательно, воспользовавшись действующими значениями напряжения и тока, мы легко можем найти (среднее) значение мощности, рассеиваемой измерительным сигналом. Очевидно, что можно также принять, по определению, что среднеквадратические значения напряжения и тока —
это такие величины постоянного напряжения и постоянного тока, при которых в резисторе переходит в тепло такое же количество энергии, какое рассеивается в нем при воздействии измеряемых напряжения или тока (тепловое определение действующего значения).
При построении измерительной системы решают вопрос о том, на какое характерное значение сигнала будет реагировать система. Измерительная система может воспроизводить мгновенные значения сигнала (осциллограф), откликаться на среднее значение (измеритель с подвижной катушкой), реагировать на среднее значение от абсолютной величины (измеритель с подвижной катушкой, снабженный выпрямителем/усилителем) или быть чувствительной к среднеквадратическому значению (электродинамический вольтметр).
Для синусоидального сигнала x(t) = asin(wt), изображенного на рис. 2.30, значения перечисленных параметров равны:
![]()
Отношение xRMS/|x|avg называют коэффициентом формы сигнала x(t), а отношение хp/xkms — коэффициентом амплитуды этого сигнала (его пик-фактором). Для синусоидального колебания коэффициент формы равен 1,11, а пик-фактор — √2 . Коэффициент формы важен в том случае, когда измерительная система проградуирована в действующих значениях (для синусоидального колебания), а фактически ею измеряется среднее значение от абсолютной величины. Именно так обстоит дело во многих электронных вольтметрах. Пик-фактор важен при измерениях шумовых и импульсных сигналов. Часто бывает желательно знать действующее значение таких сигналов, однако при этом необходимо, чтобы пиковые значения сигналов оставались в линейном диапазоне системы; только в этом случае мы избежим ошибок измерения, обусловленных насыщением.
Разрешающая способность
Разрешающая способность (разрешение) измерительной системы — это размер шага, на который может быть настроена система, или шага, с которым на индикатор выводится результат действия системы. По определению, разрешающая способность — это наименьший интервал х значения измеряемой величины х, который все еще вызывает изменение результата измерения у. Численно разрешающая способность R выражается в виде:

Рис. 2.30. Полный размах хpp, действующее значение хrms, и среднее значение от абсолютной величины |x|avg сигнала синусоидальной формы.
![]()
Иногда речь идет о максимальном значении разрешения. Оно достигается при максимальной величине х, которая может быть измерена с помощью этой системы без насыщения, искажений и перегрузки:
![]()
Разрешающая способность R имеет конечное значение для всех систем, в которых результат измерения не увеличивается непрерывно с ростом измеряемой величины х. Примером таких систем являются механическая измерительная система с люфтом и трением покоя, проволочный потенциометр, ступенчатый аттенюатор и цифровой индикатор; во всех этих случаях выходная величина у не растет непрерывно с увеличением входного воздействия, а меняется малыми скачками у.
Если разрешение системы конечно, то результат измерений оказывается квантованным; при этом возникает ошибка квантования. Ошибки, являющиеся следствием квантованности результата измерения, можно разделить на ошибки усечения и ошибки округления Ошибка усечения происходит в том случае, когда в системе не принимаются во внимание десятичные знаки справа от младшего указываемого десятичного разряда: остаток просто опускают. Обычно это имеет место в алфавитно-цифровых индикаторах, например, в цифровом вольтметре. Величина допускаемой при этом ошибки равна х / х, то есть отношению наименьшего возможного шага х к воспроизводимой на индикаторе величине х. Ошибка округления происходит в том случае, когда в наименьшем указываемом десятичном разряде учитывается остаток путем округления до ближайшего значения в этом разряде При этом ошибка равна х /2х, то есть половине наименьшего шага, деленной на индицируемое значение. Если при проведении нуль-измерения мы применим эталон, который можно подстраивать только в ступенчатом режиме, и будем изменять задаваемую эталоном величину до тех пор, пока нуль-орган не покажет наименьший отсчёт, то будет иметь место ошибка округления.