

3.5.3 Электронная регистрация
У рассмотренных методов регистрации скорость записи сильно ограничена, поскольку для реализации каждого из них требуются движущиеся механические части. Часто, однако, бывает желательно зарегистрировать процесс, протекающий с высокой скоростью, для последующего изучения и анализа. Это можно сделать с помощью быстрой твердотельной памяти. Если из входного сигнала с очень высокой частотой берутся выборки и заносятся в полупроводниковую память, то позднее их можно будет считать оттуда со значительно меньшей скоростью и представить их для наблюдения с помощью осциллографа, например, или с использованием перьевого самописца. В результате мы получим реальное растяжение временной шкалы. Таким путем можно осуществить изменение временного масштаба в 109 раз (так что наносекунда становится секундой). Это эквивалентно тому, как если бы наблюдаемое явление происходило в 109 раз медленнее. Приборы, с помощью которых это можно сделать, называют устройствами для регистрации быстропротекающих процессов. Необходимо отметить, что хотя в стробоскопическом осциллографе также берутся выборки входного сигнала (см. параграф 4.4), с его помощью можно осуществлять индикацию только периодических сигналов, поскольку принцип его действия основан на взятии когерентных выборок (см. параграф 2.2). В осциллографе такого типа сигналы не запоминаются, а непосредственно индицируются на экране.
Рис. 3.84 поясняет принцип действия устройства для регистрации переходных (быстропротекающих) процессов. Этот прибор иногда называют оцифровывающим осциллографом, в котором осуществляется дискретизация, хотя это название включает в себя уже упомянутый стробоскопический осциллограф. Существенной функцией устройства для регистрации переходных процессов является то, что с его помощью можно регистрировать как периодические, так и апериодические (переходные) сигналы, которые можно выводить для наблюдения позднее со значительно меньшей скоростью и в периодическом режиме.
Электронное устройство для регистрации переходных процессов работает следующим образом. Сначала из входного сигнала в расположенные на равном расстоянии друг от друга моменты времени берутся выборочные значения, которые с помощью аналого-цифрового преобразователя (АЦП) переводятся в форму цифровых данных. Эти данные записываются в циклическую полупроводниковую память. В отсутствие сигнала запуска этот процесс происходит непрерывно и новые данные постоянно записываются поверх старых данных. Памятью (длиной слова и числом сохраняемых слов) определяется разрешающая способность по амплитуде и длительность записи. По сигналу запуска сравнивающее устройство пeреводит счетчик в активный режим.
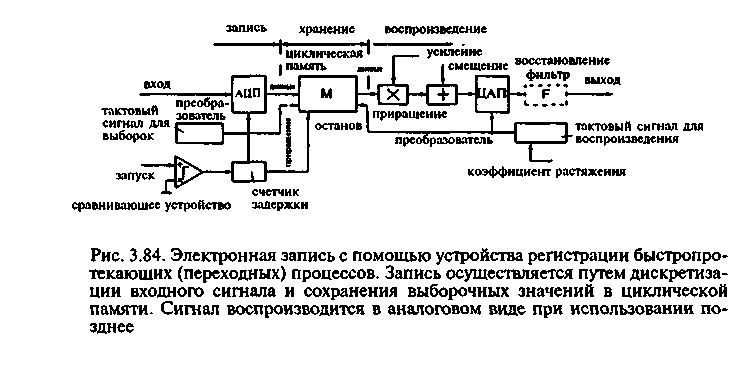
Этим счетчиком, в который извне заносится определенное начальное значение, определяется число выборок, которое будет занесено в полупроводниковую память до того, как процесс циклического запоминания будет остановлен. Если, например, объем памяти составляет 4000 слов, а в счетчик задержки в качестве начального значения заносится число 2000, то к моменту, когда содержимое счетчика станет равным нулю, в памяти окажутся заполненными 2000 выборок до момента действия сигнала запуска и 2000 выборок после этого момента. Поскольку частота тактового сигнала, с которой берутся выборки, точно известна заранее, восстанавливаемый сигнал содержит информацию не только о величине, но также и о форме сигнала как функции времени. Если, например, частота тактового сигнала установлена равной 500 МГц, то мы сможем зарегистрировать сигнал в пределах интервала длительностью ±4 мкс по обе стороны от момента запуска; выборки берутся каждые 2 не. Процедура непрерывной записи поверх старых данных, прерываемая в момент времени, задержанный на определенную величину по отношению к моменту запуска, позволяет нам наблюдать события, происходившие перед тем, как произошел пуск. После того, как устройство для регистрации переходных процессов остановлено, сигнал в форме цифровых данных сразу же становится доступным для обработки на компьютере. Эти данные можно также вновь преобразовать в аналоговый сигнал, как указано на рис. 3.84. Восстанавливаемый сигнал можно воспроизводить в любом (регулируемом) темпе, который определяется частотой генератора тактового сигнала для воспроизведения. Продолжая начатый пример, предположим, что восстановление сигнала происходит со скоростью 5 выборок в секунду; тогда 10 нc входного сигнала будут соответствовать 1 секунде выходного сигнала (коэффициент растяжения равен 108). В этом случае сигнал можно было бы изобразить на перьевом самописце, и это заняло бы в целом 13,3 минуты. Если генератор тактового сигнала, используемого при воспроизведении, поставлен в такой режим работы, что осуществляется сканирование только части памяти, можно реализовать «лупу времени» и наблюдать только самую интересную часть сигнала. При обратном преобразовании сигнала в аналоговое напряжение совсем легко изменить величину сигнала (усилить его или ослабить) путем умножения в цифровом виде; можно также ввести смещение (добавляя двоичное число).
Для того, чтобы при аналоговом восстановлении получалась верная копия входного сигнала, необходимо сгладить скачкообразные приращения выходного сигнала цифро-аналогового преобразователя (ЦАП), пропустив этот сигнал через фильтр нижних частот. Мы еще вернемся к так называемым восстанавливающим фильтрам в параграфе 4.5. Для правильного восстановления частота (первичных) выборок должна по крайней мере вдвое превышать частоту наиболее высокочастотной составляющей входного сигнала. С этим мы также встретимся в параграфе 4.5. При скорости взятия выборок 500 МГц, как мы предположили в нашем примере, ширина спектра входного сигнала должна быть меньше 250 МГц. Правда, на практике, чтобы сделать ошибки малыми (5%-ными), полосу частот, занимаемую входным сигналом, следует ограничить 50 МГц.
Очевидно, что частотный диапазон устройства для регистрации переходных процессов определяется частотой, с которой берутся первичные выборки (темп извлечения из памяти вторичных выборок определяется частотой тактового генератора, используемого при восстановлении сигнала). Время, необходимое для взятия каждой первичной выборки, зависит от быстродействия схемы фиксации выборок, процедуры преобразования и записи в память. Поэтому взамен непосредственному эквидистантному взятию выборок изобретен ряд других способов (рис. 3.85). На рис. 3.85(а) выборки из сигнала берутся быстро (в том темпе, в каком изменяется сам сигнал) при равных интервалах времени между выборками. Это как раз тот случай, который мы рассматривали до сих пор. Его называют взятием выборок «в реальном масштабе времени» и для него необходимы чрезвычайно быстрые схемы взятия выборок и АЦП.
На рис. 3.85(b) показано, что выборки из того же самого сигнала можно сделать поочередно, по принципу стробоскопа. Однако теперь сигнал обязан быть периодическим!. В первом периоде сигнала выборка берется в точке «1». В следующем периоде выборка берется в точке «2». (На самом деле, схема взятия выборок может пропускать целое число периодов перед тем, как взять следующую выборку.) Ясно, что при таком методе преобразование и запись в память могут выполняться тогда, когда это возможно; имеется масса времени. Трудность заключается в той точности, с какой надо поддерживать временные соотношения между моментами взятия выборок и периодом входного сигнала. Если в результате пропускания периодов время между выборками растет, то становится все труднее соблюдать когерентность выборок по отношению к измеряемому сигналу. С другой стороны, чем меньше периодов входного сигнала заключено между соседними выборками, тем быстрее должны срабатывать соответствующие схемы.
На рис. 3.85(с) представлен гибридный способ взятия выборок, называемый дискретизацией со случайным повторением. В течение первого периода сигнала выборки берутся с крупным шагом в точках, помеченных цифрой «1» на равном расстоянии друг от друга. Во втором периоде (снова возможно, после того как пропущено несколько периодов) выборки берутся с тем же самым шагом между моментами взятия выборок.,

Однако эти моменты, помеченные цифрой «2», расположены совершенно случайно по отношению к моментам взятия выборок в первом периоде. В данном случае больше нет необходимости в когерентности выборок с входным сигналом. Необходимо только, чтобы удовлетворялись два требования: расстояние между выборками должно оставаться постоянным, а сигнал должен быть периодическим. Для того, чтобы можно было восстановить входной сигнал, нужно просто измерить расстояние между моментом запуска и моментом времени, задаваемым тактовым сигналом, используемым при взятии выборок.
4
Электронные измерительные системы
Некоторые комбинации устройства обработки сигнала и индикации в измерительных системах применяются так часто, что они стали самостоятельными приборами. В частности, они используются в оборудовании, созданном для измерения таких основных величин, как частота, амплитуда тока или напряжения, сопротивления и т. д. Приборы, предназначенные для наблюдения периодически повторяющихся сигналов, такие как осциллограф для анализа во временной области или анализаторы спектра для анализа в частотной области, также попадают в эту категорию. Фактически упомянутые величины измеряются исключительно с помощью электронных приборов. В этой главе мы рассмотрим некоторые из таких электронных измерительных систем.
4.1 Измерение частоты
Частота повторения явления определяется как число, показывающее, сколько раз это явление происходит за единицу времени. Интервал времени между двумя повторениями называется периодом Т. Следовательно, частота и период связаны соотношением f = 1 / Т. Поэтому измерение частоты часто можно заменить измерением временного интервала и наоборот.
Существует много методов измерения частоты электрического сигнала. Один из них — резонансный метод, который применялся раньше в частотомерах, содержавших набор стержней, вибрирующих под воздействием входного сигнала. Стержни имеют слегка различающиеся резонансные частоты. Частота входного сигнала принимается приблизительно равной резонансной частоте стержня с наибольшей амплитудой вибраций. (Этот метод измерения применялся для определения линейной частоты вспомогательных силовых генераторов переменного напряжения.)
Другой метод измерения частоты основан на преобразовании частоты в напряжение (см. рис. 4.1). Здесь входной сигнал сначала преобразуют в сигнал
прямоугольной формы. Нарастающий фронт прямоугольного колебания запускает ждущий мультивибратор, который вырабатывает синхронизованный с входным сигналом узкий импульс с фиксированными амплитудой V и длительностью Т. Затем эти импульсы пропускаются через фильтр нижних частот и их среднее значение (постоянная составляющая) индицируется стрелочным прибором. Диапазон преобразователя частоты в напряжение такого типа составляет приблизительно две декады. На высоких частотах он ограничен временем нарастания прямоугольных колебаний, а также временем нарастания и спада импульсов ждущего мультивибратора. На низких частотах ограничение обусловлено фильтром нижних частот. Частота среза этого фильтра должна быть достаточно низкой, чтобы минимизировать пульсации выходного сигнала, поступающего на стрелочный прибор. Эти пульсации являются следствием неполной фильтрации импульсного напряжения VB. Чтобы иметь возможность измерять низкие частоты, частота среза фильтра должна быть уменьшена, а это делает отклик системы очень инерционным.
Преобразователь временного интервала в напряжение не имеет последнего недостатка. Этот преобразователь создает напряжение, пропорциональное времени между двумя последовательными прохождениями входного сигнала через нуль. То есть здесь, в отличие от измерения частоты, фактически измеряется период. Первый шаг преобразования аналогичен указанному на рис. 4.1. Импульсами VB синхронизируется генератор пилообразного напряжения (см. рис. 4.2). Напряжение Vs создаваемое этим генератором, имеет строго определенный наклон и сбрасывается положительным фронтом импульсов VB. В момент появления импульса, напряжение Vs достигает значения, которое запоминается схемой хранения точно на один период. Полученное таким образом выходное напряжение V0 пропорционально измеренной длительности предыдущего периода. Для больших периодов диапазон измерения ограничен максимально достижимой амплитудой пилообразного напряжения. Для малых периодов ограничение обусловлено временем обратного хода пилообразного напряжения. Диапазон измерения также составляет приблизительно две декады.


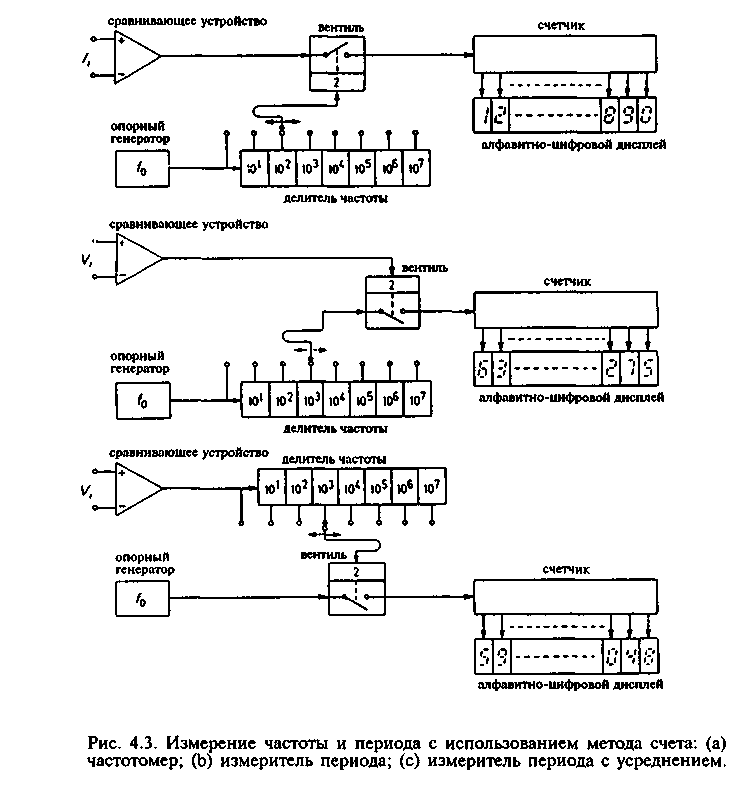
Чаще всего для измерения частоты и периода используется метод счета, применяемый в частотомерах и измерителях периода. Строго говоря, это название неправильно, поскольку считать можно только числа, а не величины, имеющие физическую размерность, такие как частота или временной интервал. В частотомере подсчитывается число колебаний измеряемого сигнала, попадающих в один период опорного сигнала точно заданной частоты. В измерителе периода процедура обратна описанной, то есть подсчитывается число периодов опорного сигнала, попадающих в один период измеряемого сигнала. Следовательно, с помощью одного и того же счетчика можно выполнять оба измерения, меняя местами два сигнала. Большая популярность этого метода измерения, в основном, связана со стремительным развитием быстрых цифровых схем и наличием сверхстабильных и точных кварцевых управляемых генераторов.
Ч![]() астотомер
с помощью сравнивающего устройства
преобразует входнойсигнал
в сигнал прямоугольной формы той же
самой частоты (см. рис. 4.3(а)). Пока
вентиль открыт (пропускает сигнал),
десятичный счетчик считает периоды
входного сигнала Vi
.После
того, как вентиль закроется, результат
счета
индицируется алфавитно-цифровым
дисплеем. Длина временного интервала,
в течение которого вентиль открыт (время
счета), определяется частотой f0
опорного генератора. Эта частота f0
делится
перестраиваемым делителем
частоты с коэффициентом деления кратным
10 (декадным счетчиком).
Время счета при этом устанавливается
равным половине одного периода
колебания, полученного делением частоты
опорного колебания. Следовательно,
частоту сигнала, управляющего вентилем,
следует еще раз поделить
на 2 на пути от выхода декадного счетчика
до вентиля, учитывая, что вентиль
открыт при низком управляющем напряжении
и закрыт при высоком.
Тогда время счета равно
10n
/
f0,
где
п
— установленное
число разрядов декадного
счетчика (который делит на 10"). Таким
образом, число подсчитанных периодов
входного сигнала в конце времени счета
равно:
астотомер
с помощью сравнивающего устройства
преобразует входнойсигнал
в сигнал прямоугольной формы той же
самой частоты (см. рис. 4.3(а)). Пока
вентиль открыт (пропускает сигнал),
десятичный счетчик считает периоды
входного сигнала Vi
.После
того, как вентиль закроется, результат
счета
индицируется алфавитно-цифровым
дисплеем. Длина временного интервала,
в течение которого вентиль открыт (время
счета), определяется частотой f0
опорного генератора. Эта частота f0
делится
перестраиваемым делителем
частоты с коэффициентом деления кратным
10 (декадным счетчиком).
Время счета при этом устанавливается
равным половине одного периода
колебания, полученного делением частоты
опорного колебания. Следовательно,
частоту сигнала, управляющего вентилем,
следует еще раз поделить
на 2 на пути от выхода декадного счетчика
до вентиля, учитывая, что вентиль
открыт при низком управляющем напряжении
и закрыт при высоком.
Тогда время счета равно
10n
/
f0,
где
п
— установленное
число разрядов декадного
счетчика (который делит на 10"). Таким
образом, число подсчитанных периодов
входного сигнала в конце времени счета
равно:
где f i частота входного сигнала. Видно, что метод счета используется,
чтобы найти отношение; мы определяем величину fi по отношению кfi Поэтому опорная частота f0 должна быть задана точно.
Опорный сигнал генерируется кварцевым генератором. Хороший срез кристалла кварца можно использовать как механический резонатор с очень высокой добротностью (106—107). Пьезоэлектрический кристалл применяется для стабилизации частоты генерируемых колебаний. Часто всю схему генератора помещают в термостат с целью поддержания постоянной температуры, даже в то время, когда генератор не используется. Таким образом достигается кратковременная стабильность 5x10-11 в час и уход частоты — из-за старения — менее чем 5x10-10 в день.
Максимальная частота, которую можно измерить таким способом, определяется быстродействием цифровых счетчиков. Этим способом можно еще измерять частоту до 150 — 200 МГц. Нижний предел частоты определяется длительностью времени счета, необходимого для подсчета достаточного числа периодов
Накопление достаточно большого числа периодов необходимо для получения малой ошибки квантования, которая всегда имеет место при счете в пределах строба. Поскольку момент переключения вентиля не связан с моментом пересечения нуля входным сигналом, ошибка квантования равна плюс или минус одному периоду входного сигнала.
Особенно это проявляется на низких частотах, когда счетчик и дисплей заполнены не полностью и ошибка квантования приводит к относительно большой погрешности измерения частоты.
Пусть, например, частота f0 равна 1 МГц, а максимальный коэффициент деления частоты п = 107. Тогда наибольшее время счета, которое можно выбрать, составляет 10 с. Частота, точно равная 900 кГц, будет индицироваться как 9000000 1, в то время как результатом измерения частоты 9 Гц будет 901. Следовательно, ошибка квантования в частотомере обратно пропорциональна измеряемой частоте. Очевидно, что она изменяется также обратно пропорционально времени счета.
На низких частотах предпочтительнее заменить измерение частоты на измерение периода. Это легко достигается перестановкой входного сигнала и сигнала опорного генератора (см. рис. 4.3(b)). Время счета теперь равно периоду1 /fi входного сигнала Vi и в течение этого интервала теперь подсчитываются периоды опорного колебания. Таким образом, результат счета в конце времени счета равен:
В![]() отличие от предыдущего случая число,
накопленное в счетчике, будет тем больше,
чем ниже частота
f
i
.Следовательно,
по мере понижения частоты
влияние ошибки квантования (член ±1 в
выражении для с) становится меньше.
Относительная ошибка квантования при
измерении периода пропорциональна
частоте входного сигнала. (Противоположный
результат наблюдается
в случае измерения частоты: ошибка
уменьшается с повышением частоты.)
При измерении периода относительная
ошибка квантования обратно
пропорциональна поделенной частоте
10n
/
f0
опорного
колебания.
отличие от предыдущего случая число,
накопленное в счетчике, будет тем больше,
чем ниже частота
f
i
.Следовательно,
по мере понижения частоты
влияние ошибки квантования (член ±1 в
выражении для с) становится меньше.
Относительная ошибка квантования при
измерении периода пропорциональна
частоте входного сигнала. (Противоположный
результат наблюдается
в случае измерения частоты: ошибка
уменьшается с повышением частоты.)
При измерении периода относительная
ошибка квантования обратно
пропорциональна поделенной частоте
10n
/
f0
опорного
колебания.
При измерении периода в дополнение к ошибке квантования возникает еще одна ошибка из-за погрешности в задании времени счета. Как можно видеть из рис. 4.4, входной сигнал У содержит шум, искажения и помехи. Поэтому момент прохождения входного сигнала через нуль не будет точно совпадать с моментом пересечения нуля чистым сигналом. В примере, показанном на рис. 4.4, время счета больше не равно Т, а составляет величину Т + T1 + T2 . Относительная ошибка времени счета определяется соотношением (T1+T2)/T. По мере увеличения наклона dVi/dt при прохождении входного сигнала Vi через нуль, ошибка времени счета будет уменьшаться, если искажения сохраняются прежними. Очевидно, что идеальным является входной сигнал прямоугольной формы.

Вклад ошибок времени измерения и ошибок квантования в результирующую ошибку можно уменьшить используя метод усреднения периода, (см. рис. 4.3(с)). Здесь частота fi входного сигнала делится декадным счетчиком на 10n. Это фактически соответствует умножению числа подсчитанных периодов входного сигнала на 10n Теперь та же самая ошибка времени счета приходится на много большее время счета. Относительная погрешность времени счета обратно пропорциональна числу периодов, по которым проведено усреднение. Это применимо также к ошибке квантования, поскольку число, накопленное в счетчике дисплея, увеличивается с числом усредняемых периодов.
На рис. 4.5 изображено порознь влияние ошибки квантования, ошибок времени измерения и ошибок опорной частоты f0 при различных значениях измеряемой частоты fi входного сигнала. Вклад погрешности частоты опорного колебания f0 в относительную ошибку измерения £ не зависит от измеряемой частоты fi Реалистическая оценка ошибки такого типа дает величину ЗхЮ-7. Вклад ошибки квантования зависит от частоты. При измерении частоты ошибка квантования обратно пропорциональна значению измеряемой частоты fi. При измерении периода она пропорциональна частоте fi .Это определяет наклоны прямых на рис. 4.5. Погрешность квантования обратно пропорциональна времени счета, а также обратно пропорциональна числу периодов, по которым проводится усреднение. Таким образом, возникает семейство прямых. Абсолютное положение каждой из этих линий можно определить следующим образом. Если измеряемая частота fi равна 1 МГц, а время счета точно равно 1 с, то на индикаторе получим значение 1000000. Относительная ошибка квантования при этом равна £ = 10-6. Этот случай отмечен на рис. 4.5 точкой A. Если измерение периода выполняется только по одному периоду и при частоте входного сигнала 10 кГц индицируется число 100, то относительная ошибка квантования составляет 10-2 .

На рис. 4.5 это соответствует точке В. На низких частотах погрешность измерения периода определяется ошибкой времени счета. Предположение о том, что отношение сигнал/шум на входе не зависит от частоты, приводит к постоянной относительной ошибке времени счета. Реальная величина этой ошибки равна Зх10-4. Если выполнено усреднение по 10n периодам, то ошибка времени счета уменьшится в 10n раз. Ошибка времени измерения приводит к выравниванию графиков ошибки в левой части рис. 4.5.