

5.5.Построение кинематических диаграмм
Кинематической диаграммой называется графическое изображение в плоской прямоугольной (декартовой) системе координат x, yизменения значения перемещения, скорости или ускорения ведомого (выходного) звена в зависимости от перемещения ведущего (входного) звена или времениt.
5.5.1.Построение диаграммы положений.
Диаграмма положений – это
графическое изображение перемещения
выходного звена в зависимости от
перемещения входного звена или времени.
Рассмотрим порядок построения диаграммы
положений на примере кривошипно –
коромыслового механизма. Воспользуемся
изображёнными на рис. 5.1 в масштабе
![]() 12 совмещёнными планами положений этого
механизма.
12 совмещёнными планами положений этого
механизма.
В координатной системе x,y
(рис. 5.14) по оси х откладываем угол
поворота кривошипа φ,
а по оси у угол
![]() поворота коромысла. За начало отсчёта
у кривошипа и коромысла примем положения
этих звеньев, соответствующих одному
из крайних положений коромысла. Для
рис. 5.1: положения 1 илиz.
Примем за начало отсчёта положение
кривошипа, соответствующее крайнему
положению коромысла (положение 1). Угол
поворота коромысла. За начало отсчёта
у кривошипа и коромысла примем положения
этих звеньев, соответствующих одному
из крайних положений коромысла. Для
рис. 5.1: положения 1 илиz.
Примем за начало отсчёта положение
кривошипа, соответствующее крайнему
положению коромысла (положение 1). Угол
![]() будем отсчитывать от положенияDC5
, а угол φ
– от положения АВ5.
будем отсчитывать от положенияDC5
, а угол φ
– от положения АВ5.
Для оси φ выбираем масштаб
![]() (град/мм),
(град/мм),
где ОР – изображение максимального угла φmax=360˚.
Для оси
![]() выбираем масштаб
выбираем масштаб![]() (град/мм),
(град/мм),
где оси
![]() max
- максимальные угол
max
- максимальные угол
![]() при поворотеφ на
угол 360˚;
при поворотеφ на
угол 360˚;
ОК – изображение
![]() max
на чертеже.
max
на чертеже.
Ось
![]() разбиваем на 10 равных отрезков на длине
ОК. Первая точка соответствует 0,1·
разбиваем на 10 равных отрезков на длине
ОК. Первая точка соответствует 0,1·![]() max
, вторая 0,2·
max
, вторая 0,2·
![]() max
и т.д. и в соответствии
с этим выставляем по оси
max
и т.д. и в соответствии
с этим выставляем по оси
![]() значения в градусах у каждой точки. Ось
φ разбиваем на 12 равных отрезков на
длине ОР. Каждая точка этого разбиения
соответствует 30˚, т.е. первая точка от
начала координат это 30˚, вторая 60˚,
третья 90˚ и т.д.
значения в градусах у каждой точки. Ось
φ разбиваем на 12 равных отрезков на
длине ОР. Каждая точка этого разбиения
соответствует 30˚, т.е. первая точка от
начала координат это 30˚, вторая 60˚,
третья 90˚ и т.д.
По замерам углов
![]() составляем таблицу по образцу (таблицу
5.1).
составляем таблицу по образцу (таблицу
5.1).
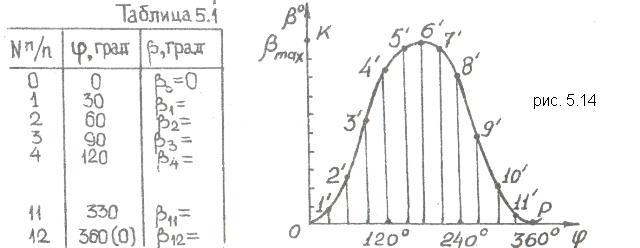
В координатной системе φ,
![]() находим точки, соответствующие парным
значениямφi
-
находим точки, соответствующие парным
значениямφi
-
![]() I
. Так, для пары, когда i=0,
это начало координат; когда i=1
, то
I
. Так, для пары, когда i=0,
это начало координат; когда i=1
, то
![]() ˚,
а
˚,
а![]() , это точка 1 (рис. 5.14) когдаi=2,
то
, это точка 1 (рис. 5.14) когдаi=2,
то
![]() ˚,
а
˚,
а![]() :
точка 2; и т.д. (рис. 5.14). Соединяя плавной
прямой точки 0; 1; 2; 3; и т.д., получаем
диаграмму положения для звенаDC
(коромысла). Когда ведомое звено движется
поступательно, то вместо
:
точка 2; и т.д. (рис. 5.14). Соединяя плавной
прямой точки 0; 1; 2; 3; и т.д., получаем
диаграмму положения для звенаDC
(коромысла). Когда ведомое звено движется
поступательно, то вместо
![]() откладывается линейное перемещениеS
этого звена и в этом случае масштаб
откладывается линейное перемещениеS
этого звена и в этом случае масштаб
![]() .
За начало отсчёта принимается одно из
крайних положений ползуна и соответствующее
ему положение кривошипа.
.
За начало отсчёта принимается одно из
крайних положений ползуна и соответствующее
ему положение кривошипа.
5.5.2.Построение диаграмм скоростей и ускорений.
Диаграмма скоростей и
диаграмма ускорений строятся в
прямоугольной плоской системе x,
y.
По оси абсцисс откладывает время t,
по оси ординат скорость или ускорение
выходного звена. Масштаб
![]() оси абсцисс у диаграммы скорости или
ускорения (рис. 5.15, 5.16) выбирается из
условия, что время одного оборота
кривошипа равноtmax
и изображается отрезком той же длины,
что и угол φ=
360˚ на диаграмме положений (рис. 5.2).
Масштаб
оси абсцисс у диаграммы скорости или
ускорения (рис. 5.15, 5.16) выбирается из
условия, что время одного оборота
кривошипа равноtmax
и изображается отрезком той же длины,
что и угол φ=
360˚ на диаграмме положений (рис. 5.2).
Масштаб
![]() ;
;![]() .
Ось абсцисс делится на то же число
отрезков, что ось абсцисс диаграммы
положений, двенадцать разных отрезков,
т.е. уголφ1
соответствует t1
, угол φ2
соответствует t2
, и т.д. (рис. 5.15, 5.16).
.
Ось абсцисс делится на то же число
отрезков, что ось абсцисс диаграммы
положений, двенадцать разных отрезков,
т.е. уголφ1
соответствует t1
, угол φ2
соответствует t2
, и т.д. (рис. 5.15, 5.16).
По оси ординат откладываются
значения скоростей или ускорений в
натуральную величину, взятые с планов
скоростей и планов ускорений, построенных
для всех двенадцати положений механизма.
Масштабы осей ординат диаграммы скоростей
и диаграммы ускорений будут соответствовать
масштабам
![]() и
и![]() планов скоростей и планов ускорений.
планов скоростей и планов ускорений.
Каждое значение скорости и ускорения соответствует времени t1~ φ1, t2~ φ2 , и т.д. Т.о., в координатных системах – время, скорость или ускорение определяем систему их 12 точек, которые необходимо затем соединить плавной кривой. Эти кривые и будут – диаграмма скорости (рис. 5.15) и диаграмма ускорений (5.16).
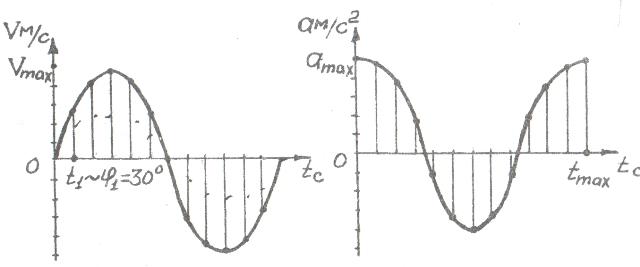
Рис. 5.15 Рис. 5.16