

4.4.Синтез кинематической схемы с качающейся кулисой по коэффициенту δ изменеия скорости хода ползуна.
Механизм с качающейся кулисой (рис. 4.5) состоит из кривошипа 1, и групп Асура. В первую входят ползун 2, качающаяся кулиса 3. Во вторую шатун 4, ползун 5.
Механизмы
такого типа используются в природе
строгальных станков. С ползуном 5 жестко
связан резец, имеющий ход Н(м) и различные
скорости
![]() рабочего и
рабочего и![]() холостого ходов.
холостого ходов.
Ставится задача по заданным: ходу резца
Н (рис. 4.5.), коэффициенту изменение
скорости хода
![]() , длине стойкиL, отношению
, длине стойкиL, отношению![]() длины С шатуна 4 к длинеlкулисы 3 определить: длинуrкривошипа, длинуlкулисы,
длины С шатуна 4 к длинеlкулисы 3 определить: длинуrкривошипа, длинуlкулисы,
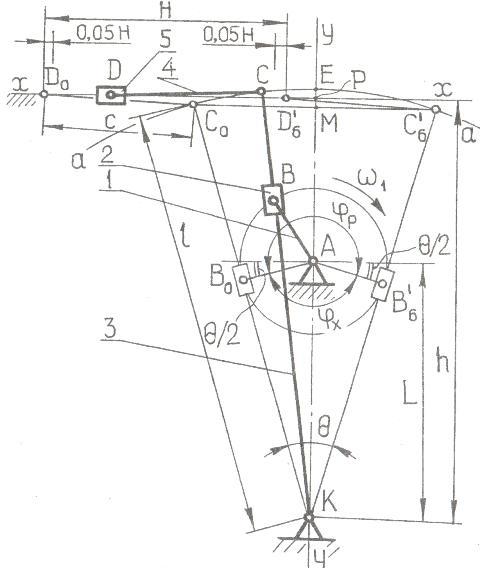
Рис.4.5.
К синтезу кулисного механизма
длину С шатуна, расстояние hот оси вращения кулисы 3 до осиx-xдвижения ползуна 5.
На рисунке 4.5. изображены два крайних и
одно промежуточное положение механизма.
Здесь же обозначено:
![]() - угол поворота кривошипа, соответствующий
рабочему ходу ползуна 5;
- угол поворота кривошипа, соответствующий
рабочему ходу ползуна 5;![]() - угол поворота кривошипа, соответствующий
холостому ходу ползуна 5;
- угол поворота кривошипа, соответствующий
холостому ходу ползуна 5;
![]() - постоянная угловая скорость кривошипа;
- постоянная угловая скорость кривошипа;![]() - угол между двумя крайними положениями
кулисы 3.
- угол между двумя крайними положениями
кулисы 3.
Обозначив
через
![]() время рабочего хода кривошипа, а через
время рабочего хода кривошипа, а через![]() время холостого хода, при постоянной
скорости кривошипа имеем
время холостого хода, при постоянной
скорости кривошипа имеем
![]() ;
;![]() .
(4.19)
.
(4.19)
Так как
![]() ;
;![]() , (4.20)
, (4.20)
то с учётом
значения коэффициента изменения скорости
![]()
из зависимостей (4.20) и (4.19) последовательно получим
![]() (4.21)
(4.21)
Из рис. 4.5. следует, что
![]() ;
;![]() (4.22)
(4.22)
Подставляя
![]() и
и![]() из зависимостей (4.22) в выражение (4.21),
имеем
из зависимостей (4.22) в выражение (4.21),
имеем
![]() ,
(4.23)
,
(4.23)
откуда
![]() (4.24)
(4.24)
Так как ось
у-у симметрии качания кулисы
перпендикулярна к осих-х, то длина
хорды![]() , а
, а![]()
Из прямоугольного треугольника КМС0 с учётом выражения (4.24), находим длинуlкулисы
![]() ,
(4.25)
,
(4.25)
а из прямоугольного треугольника КАВ0определяем длину кривошипаr
![]() (4.26)
(4.26)
Так как задано,
что
![]() , то длина С шатуна 4 определится из
выражения
, то длина С шатуна 4 определится из
выражения
![]() (4.27)
(4.27)
При построении
кинематической схемы ось х-храсполагаем посредине стрелы прогиба
дуги![]() ,
т.е. посредине отрезка ЕМ и перпендикулярно
осиу-у . (Направляющие ползуна в
этом случае будут испытывать наименьшее
давление).
,
т.е. посредине отрезка ЕМ и перпендикулярно
осиу-у . (Направляющие ползуна в
этом случае будут испытывать наименьшее
давление).
Расстояние hот осих-хдо осиКнайдётся
![]() (4.28)
(4.28)
Для того,
чтобы шатун 4 работал на растяжение при
строгании, строгание должно производиться
в направлении слева направо. При рабочем
ходе (строгании) угол поворота кривошипа
![]() >
>![]() ,
поэтому вращение кривошипа 1 должно
быть сообщено по ходу часовой стрелки.
,
поэтому вращение кривошипа 1 должно
быть сообщено по ходу часовой стрелки.
В начале и в конце рабочего и холостого резца имеются перебеги (части хода, равные 0,05Н, когда резец не контактирует с деталью, т.е. сила резания Ррез=0 ), то необходимо учитывать при силовом анализе механизма.
Таким образом заданы и получены все размеры звеньев механизма, необходимые для синтеза, именно: r(м) – радиус кривошипа;L(м) – длина стойки;l(м) – длина шатуна; Н(м) – ход ползуна;h(м) – расстояние оси качения кулисы от направляющей ползуна 5.
Перед построением необходимо проверить условие существования кривошипа и качающейся кулисы. Это условие обеспечивается при удовлетворении следующего неравенства
r < L
Если неравенство не удовлетворяется, необходимо изменить исходные данные и провести повторный расчёт всех длин звеньев.
Порядок построения кинематической схемы следующий:
1.Выбираем
масштаб
![]() по одному из известных значений длин
звеньев
по одному из известных значений длин
звеньев
Например
![]() (м/мм), где АВ(мм) длина, изображающая
кривошип на чертеже. Эта длина назначается
с учётом желаемого размера кинематической
схемы. Все остальные размеры на схеме
вычерчиваются в выбранном масштабе,
т.е.
(м/мм), где АВ(мм) длина, изображающая
кривошип на чертеже. Эта длина назначается
с учётом желаемого размера кинематической
схемы. Все остальные размеры на схеме
вычерчиваются в выбранном масштабе,
т.е.
![]() (мм) ;
(мм) ;![]() (мм) и т.д.
(мм) и т.д.
2.Проводим две
взаимно перпендикулярные прямые х-хиу-у, и на расстоянии![]() (мм) (рис.4.5) на осиу-унаходим точкуК. От точкиКна расстоянииКА=L/
(мм) (рис.4.5) на осиу-унаходим точкуК. От точкиКна расстоянииКА=L/![]() (мм) на осиу-уотмечаем точкуА,
из которой радиусом
(мм) на осиу-уотмечаем точкуА,
из которой радиусом![]() (мм) проводим окружность.
(мм) проводим окружность.
3.Из точки Кпроводим луч длинойКС.
4.Из точки СрадиусомСDпроводим дугу окружности до пересечения с осьюх-х. Точка пересечения и будет искомая точкаD.
Полученные точки A,В,С,D, К являются центрами цилиндрических шарниров синтезируемого механизма.