

Цифровая обработка сигналов ЦОС / Матлаб / Лаба 6 / C6_195_Sklizkov_Dmitry_RT_31
.docxЛабораторная работа 6
Склизков Дмитрий РТ-31
Задание 3.
Для когерентно-импульсной РЛС (см. рис.3) рассчитайте параметры гребенчатого фильтра на базе процессора ДПФ (минимально необходимый размер выборки
 и период (интервал) дискретизации
и период (интервал) дискретизации
 )
для выработки оценок радиальной
составляющей скорости целей. Значение
несущей частоты РЛС
)
для выработки оценок радиальной
составляющей скорости целей. Значение
несущей частоты РЛС
 1,7 ГГц,
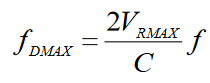
максимальное значение радиальной
скорости цели
1,7 ГГц,
максимальное значение радиальной
скорости цели
 5400
км/ч, потенциальное значение ошибки не
должно превышать 10 м/с. Для упрощения
задачи время прихода сигнала будем
считать известным, шумовой и динамической
ошибкой в оценках точности можно
пренебречь.
5400
км/ч, потенциальное значение ошибки не
должно превышать 10 м/с. Для упрощения
задачи время прихода сигнала будем
считать известным, шумовой и динамической
ошибкой в оценках точности можно
пренебречь.
Определите
реакцию ДПФ-процессора на сигнал,
отраженный от цели, имеющей радиальную
составляющую скорости
 1000;
1500; 10; 0 м/с.
1000;
1500; 10; 0 м/с.
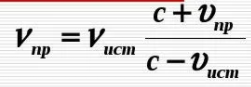
Эффект Доплера:
Эффе́кт До́плера — изменение частоты и, соответственно, длины волны излучения, воспринимаемой наблюдателем (приёмником), вследствие движения источника излучения относительно наблюдателя (приёмника)
ДПФ-процессор – прибор, который получает на вход сигнал от цели и анализирует его с помощью дискретного преобразования Фурье
Частота волны, отраженной от приближающегося объекта (v отрицательная) увеличивается. От уходящего объекта (v положителная) – уменьшается.
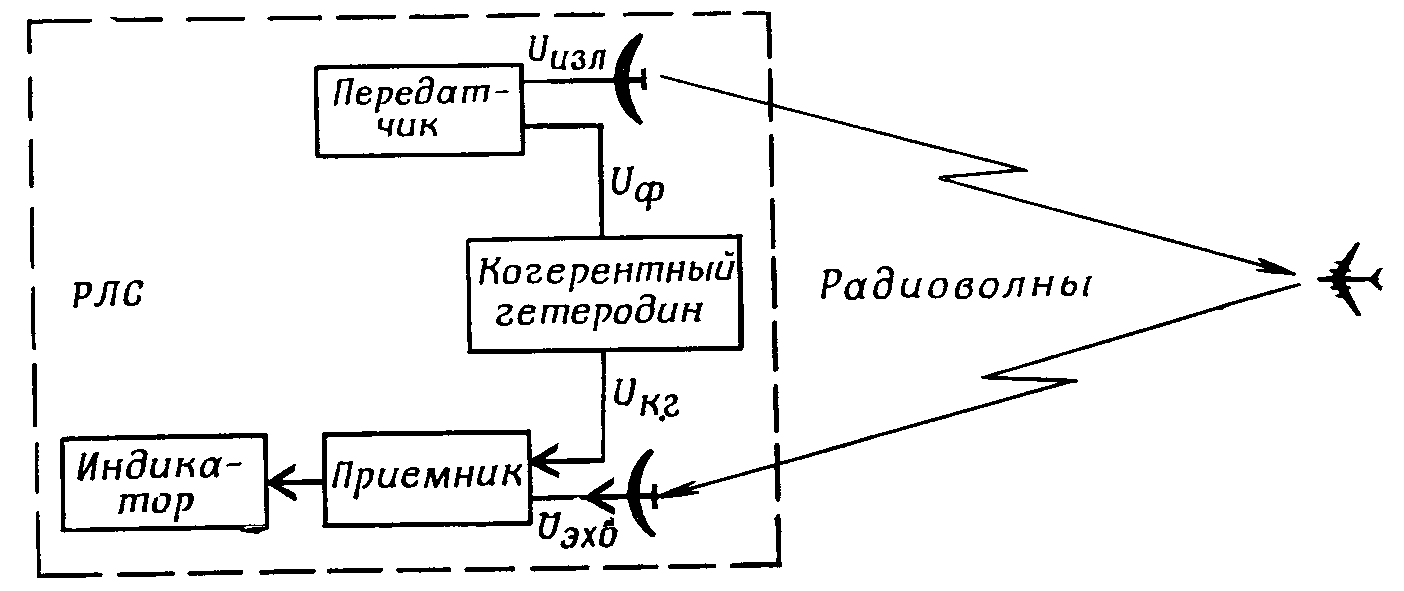 Две волны называются
когерентными, если их частоты одинаковы,
разность фаз, а также направления
колебаний, обусловленных этими волнами,
не изменяются с течением времени и не
перпендикулярны друг к другу.
Две волны называются
когерентными, если их частоты одинаковы,
разность фаз, а также направления
колебаний, обусловленных этими волнами,
не изменяются с течением времени и не
перпендикулярны друг к другу.
Гетеродин - это частота сигнала , которая создается путем объединения или смешивания двух других частот
clc
clear all
close all
format short g
V_rmax = 5400 / 3600 * 1000 %перевод в м/с
V_rmin = 10
f_nes = 1.7*10^9
c = 3 * 10^8
f_dmax = 2 * V_rmax / c * f_nes %макс. знач. доплеровской частоты
f_dmin = 2 * V_rmin / c * f_nes %разрешение по допплеровской частоте
F_s = f_dmax * 2
t=0:1/F_s:1/f_dmin;
n=t*F_s;
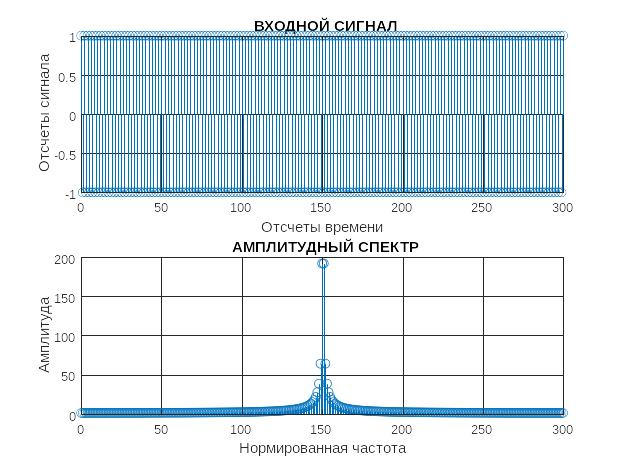
vr=1500; %действующая рад. скорость
fd=2*vr*f_nes/c
un=exp(j*2*pi*fd*t);
scompl=fft(un);
s=abs(scompl);
phi=180/pi*angle(scompl);
subplot(2,1,1)
stem(n,un)
title(' ВХОДНОЙ СИГНАЛ')
xlabel('Отсчеты времени')
ylabel('Отсчеты сигнала')
grid on
subplot(2,1,2)
stem(n, s);
title('АМПЛИТУДНЫЙ СПЕКТР')
xlabel('Нормированная частота')
ylabel('Амплитуда')
grid on
hold on
V_rmax = 1500 %максимальная радиальная скорость
V_rmin = 10 %минимальная радиальная скорость
f_nes = 1.7e+09 %несущая частота
c = 300000000 %скорость света
f_dmax = 17000 %максимальная частота по Доплеру
f_dmin = 113.33 %минимальная частота по Доплеру
F_s = 34000 %период следования (период дискретизации), исходя из условия однозначного измерения максимального Доплера
fd = 1700 %текущий Доплер
Задание 4
Оценить параметры ДПФ-процессора (минимально необходимый размер выборки и период (интервал) дискретизации ) для выработки оценок радиальной составляющей скорости целей при неизвестной дальности (неизвестном времени прихода сигнала). Исходные данные для расчета из примера 1, скважность последовательности зондирующих импульсов в РЛС КНИ
 5.
5.
Задачу решить в общем виде – время прихода сигнала неизвестно. Шумовой и динамической ошибкой в оценках точности можно пренебречь.
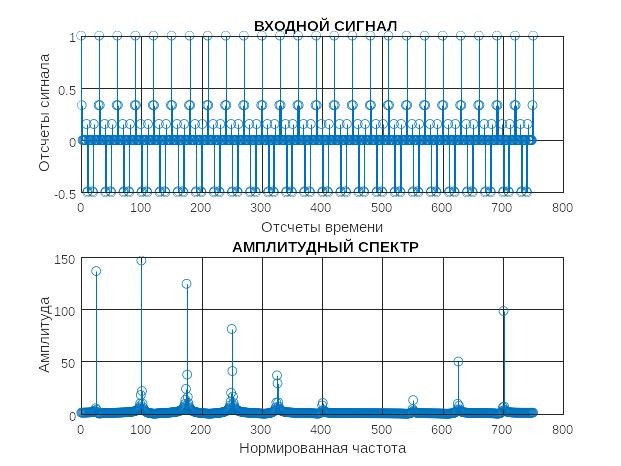
Определите реакцию ДПФ-процессора на сигнал, отраженный от цели, имеющей значения радиальной составляющей скорости те же, что и в предыдущей задаче.
fdmax = 17000
fdmin = 113.33
vr = 1500
Fsl = 8500
T = 1.1765e-05
N = 750
clc
close all
clear
f=1.7e9; %несущая частота
vrmax=5400 / 3600 * 1000; %максимальная радиальная скорость
vrmin=10; %минимальная радиальная скорость
%(точность (чувствительность) измерения радиальной скорости)
fdmax=2*vrmax*f/3e8 %максимальный допплер
fdmin=2*vrmin*f/3e8 %минимальный допплер
%(предел чувствительности допплеровского измерителя)
vr=1500 %текущая радиальная скорость
fd=2*vr*f/3e8; %текущий допплер
Fsl=fdmax/2 %период следования (ЗДЕСЬ НЕ РАВЕН периоду дискретизации), определяется исходя из условия однозначного измерения максимального допплера
taui=1/(Fsl*5)
T=taui/2 %интервал дискретизации
N=1/(fdmin*T)%размер выборки процессора ДПФ
t=0:T:1/fdmin;%вектор времени
n=t/T; %временные отсчеты
d=(0:(Fsl/fdmin))' *1/Fsl;%вектор описывающий положение импульсов сигнала на временной оси в пределах n от 0 до N
un1=pulstran(t,d,'tripuls',2*taui); %последовательность треугольных после оптимальной фильтрации в приемнике) видеоимпульсов
un=un1.*exp(j*2*pi*fd*t); %отсчеты сигнала, полученные в результате
%выделения с помощью ФД модуляции последовательности видеоимпульсов Доплером цели
scompl=fft(un);% комплексный спектр сигнала
s=abs(scompl); % амплитудный спектр сигнала
phi=180/pi*angle(scompl);
subplot(2,1,1) %определение места 1 графика
stem(n,un) %построение графика сигнала
title(' ВХОДНОЙ СИГНАЛ')
xlabel('Отсчеты времени') %подпись по оси x
ylabel('Отсчеты сигнала') %подпись по оси y
grid on % добавление сетки
subplot(2,1,2) %определение места 2 графика
stem(n, s); % построение амплитудного спектра
title('АМПЛИТУДНЫЙ СПЕКТР')
ylabel('Амплитуда')
xlabel('Нормированная частота')
grid on
hold on
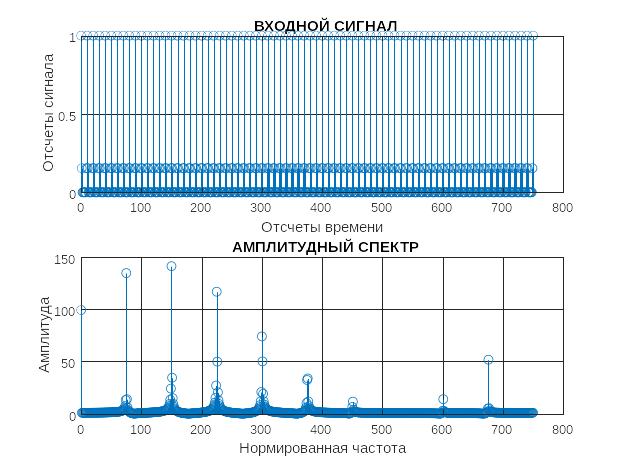
Максимальный уровень сигнала наблюдаем на выходе n=150, что соответствует радиальной скорости 150*10=1500 м/с
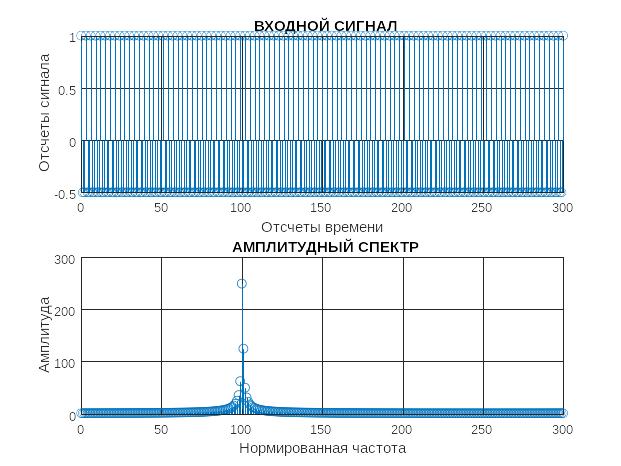
V=1000 m/c
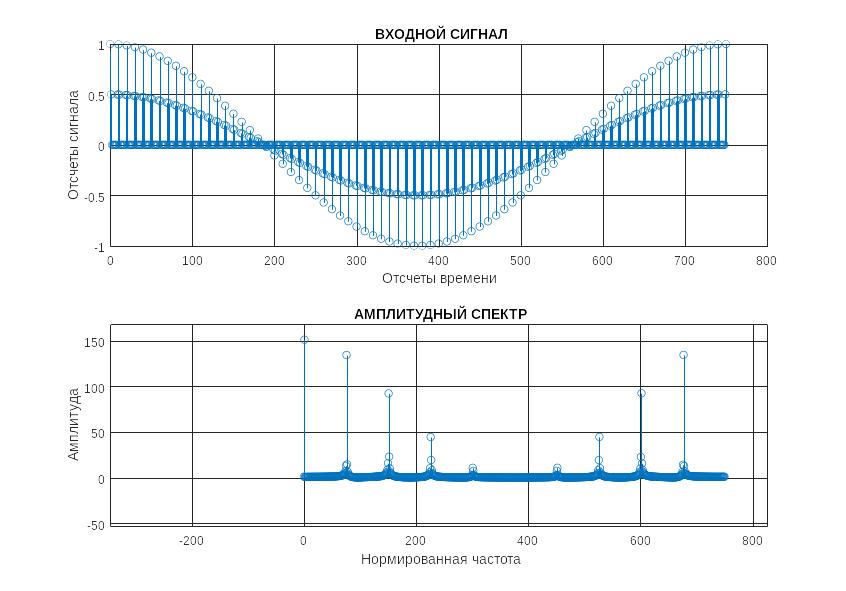
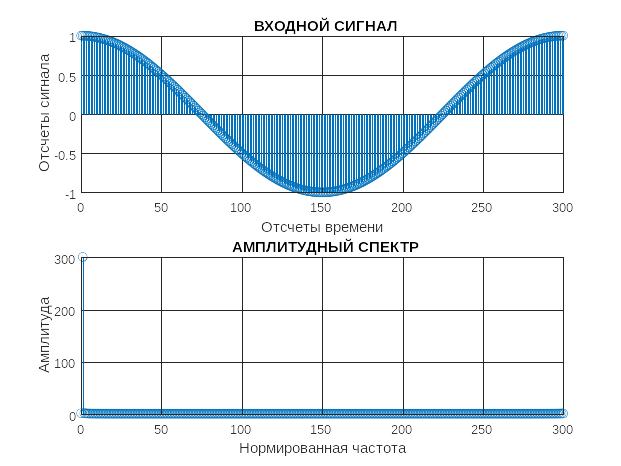
V = 10 m/c
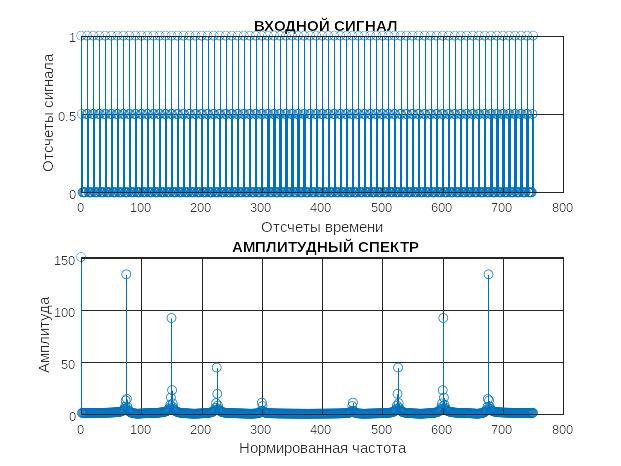
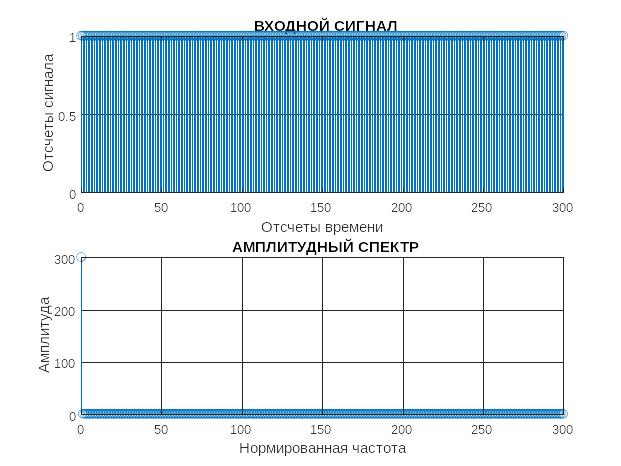
V= 0 m/c
Задание 5
Рассчитайте
параметры фильтра на базе процессора
БПФ, согласованного с одиночным
ЛЧМ-импульсом, имеющим следующие
параметры – длительность импульса
 ,
где
- период дискретизации,
,
где
- период дискретизации,
 -
минимальное значение несущей частоты,
-
минимальное значение несущей частоты,
 - максимальное значение несущей частоты.
Сравните полученные результаты фильтрации
с аналогичным по длительности одиночным
радиоимпульсом по крутизне нарастания
выходного напряжения вблизи максимума.
- максимальное значение несущей частоты.
Сравните полученные результаты фильтрации
с аналогичным по длительности одиночным
радиоимпульсом по крутизне нарастания
выходного напряжения вблизи максимума.
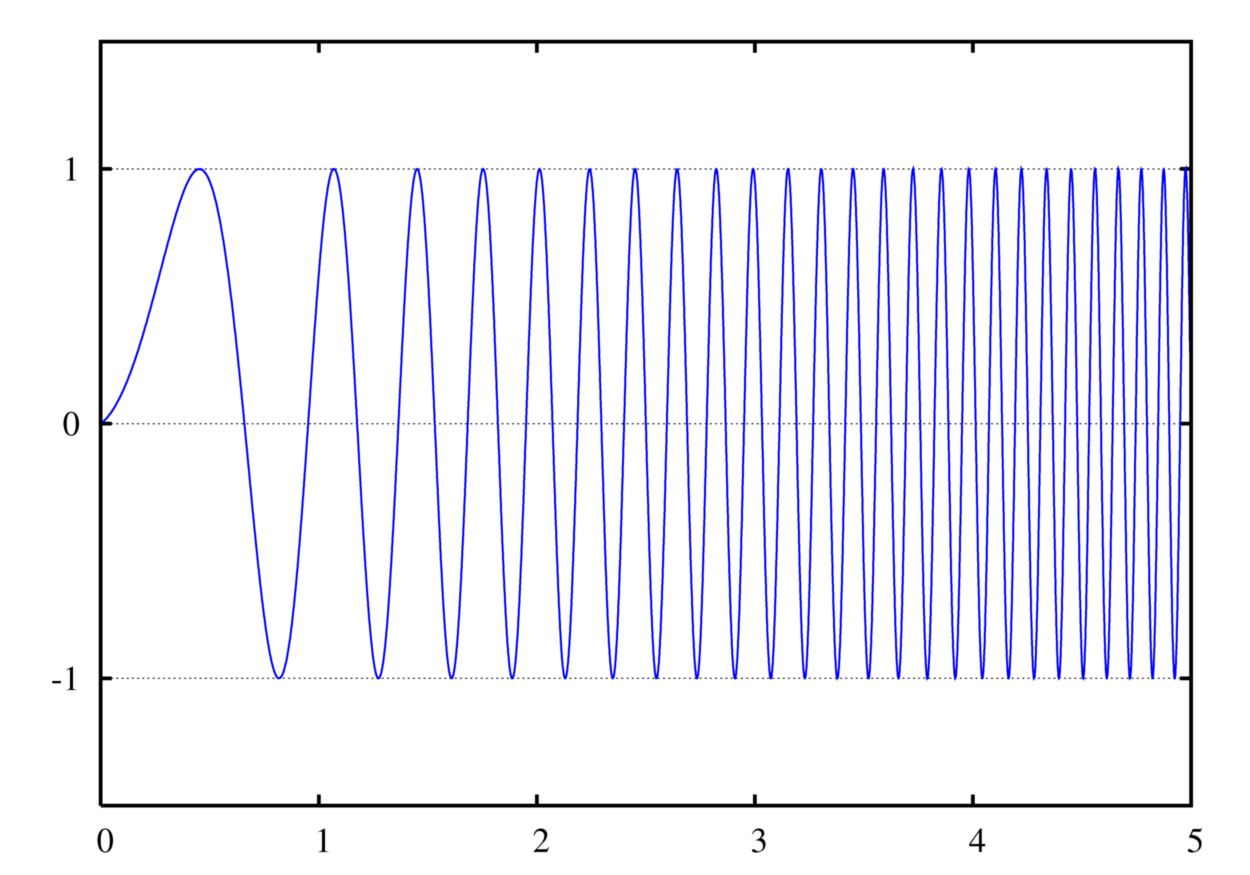
ЛМЧ-сигнал
clc
clear
close all
%БЫСТРАЯ СВЕРТКА. СОГЛАСОВАННЫЙ ФИЛЬТР НА БАЗЕ ПРОЦЕССОРА БПФ
%CИГНАЛ ЛЧМ
N=511 %размер выборки ДПФ
n=0:1:N; %вектор отсчетов времени
T=1 %период дискретизации
t=0:T:N*T; %вектор времени
f0=0.03 %минимальное значение частоты ЛЧМ-сигнала
f1=0.06 %максимальное значение частоты ЛЧМ-сигнала
t1=N*T %длительность ЛЧМ-сигнала (время изменения частоты от
%минимального до максимального значения
uin=chirp(t,f0,t1,f1,'linear'); %вычисление вектора отсчетов
%входного ЛЧМ-сигнала
h=uin(N-n+1); %формирование вектора импульсной характеристики
%фильтра, согласованного с сигналом uin
uou=fftfilt(h,uin); %вычисление быстрой свертки
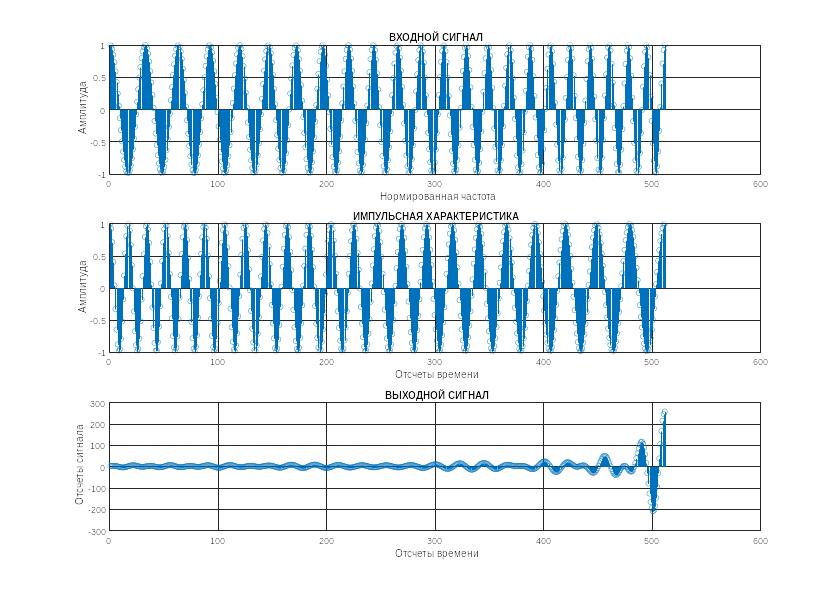
subplot(3,1,2) %определение места No2 графика в матрице 1х2
stem(h); % построение импульсной характеристики
title('ИМПУЛЬСНАЯ ХАРАКТЕРИСТИКА') %заголовок
xlabel('Отсчеты времени') %подпись по оси x
ylabel('Амплитуда') %подпись по оси y
grid on % добавление сетки
subplot(3,1,1) %определение места No1 графика в матрице 1х3
stem(uin); % построение графика входного сигнала
title('ВХОДНОЙ СИГНАЛ') %заголовок
xlabel('Нормированная частота') %подпись по оси x
ylabel('Амплитуда') %подпись по оси y
grid on % добавление сетки
subplot(3,1,3) %определение места No3 графика в матрице 1х3
stem(uou) %построение графика выходного сигнала
title(' ВЫХОДНОЙ СИГНАЛ') %заголовок
xlabel('Отсчеты времени') %подпись по оси x
ylabel('Отсчеты сигнала') %подпись по оси y
grid on % добавление сетки
hold on
Гармонический сигнал
clc
clear
close all
%БЫСТРАЯ СВЕРТКА. СОГЛАСОВАННЫЙ ФИЛЬТР НА БАЗЕ ПРОЦЕССОРА БПФ
%CИГНАЛ ГАРМОНИЧЕСКИЙ
N=511
n=0:1:N
T=1
t=0:T:N*T
f0=0.03
f1=0.06
t1=N*T
uin=cos(2*pi*f1*n*T)
h=uin(N-n+1)
uou=fftfilt(h,uin)
subplot(3,1,1) %определение места No1 графика в матрице 1х2
stem(h); % построение импульсной характеристики
title('ИМПУЛЬСНАЯ ХАРАКТЕРИСТИКА') %заголовок
xlabel('Отсчеты времени') %подпись по оси x
ylabel('Амплитуда') %подпись по оси y
grid on % добавление сетки
subplot(3,1,2) %определение места No2 графика в матрице 1х3
stem(uin); % построение графика входного сигнала
title('ВХОДНОЙ СИГНАЛ') %заголовок
xlabel('Нормированная частота') %подпись по оси x
ylabel('Амплитуда') %подпись по оси y
grid on % добавление сетки
subplot(3,1,3) %определение места No3 графика в матрице 1х3
stem(uou) %построение графика выходного сигнала
title(' ВЫХОДНОЙ СИГНАЛ') %заголовок
xlabel('Отсчеты времени') %подпись по оси x
ylabel('Отсчеты сигнала') %подпись по оси y
grid on % добавление сетки
hold on
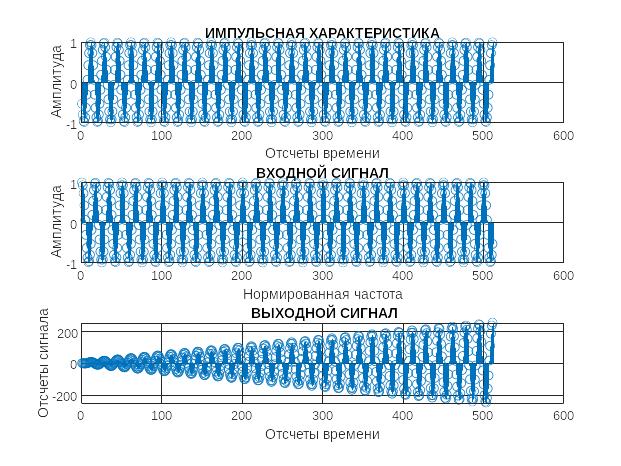
Мы видим, что результаты фильтрации по крутизне нарастания выходного напряжения вблизи максимума в принципе одинаковы, но у лчм-сигнала максимум более ярко выражен