

План семестра поурочный по ВычМат-2014 / Занятие-11-Многомерн-Оптимизация / 9 лекция Матлаб (Оптимизация, линейное программирование)
.docxМАТЛАБ. ОПТИМИЗАЦИЯ, ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ.
Поиск
экстремума функции одной переменной.
Поиск локального (в пределах определенного
интервала) минимума осуществляет функция
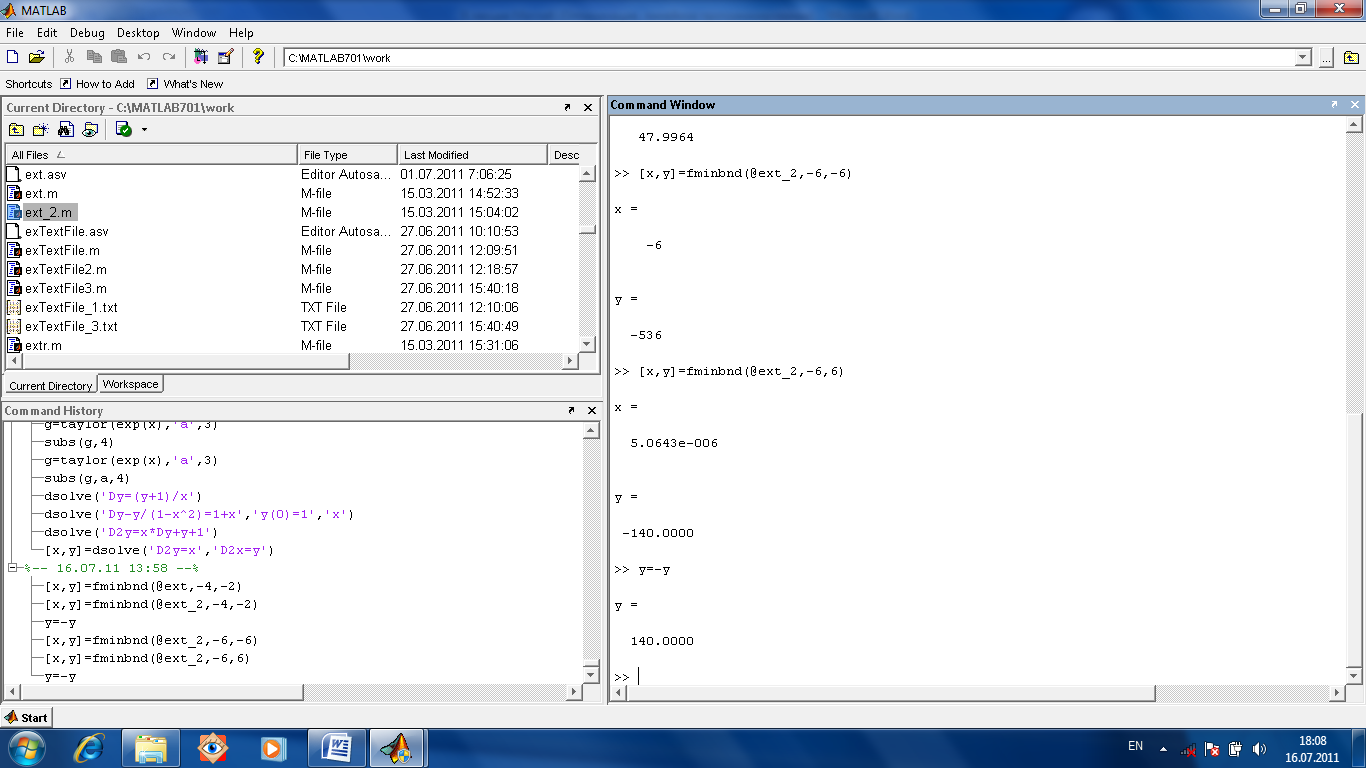
[x,y]=fminbnd(имяФункции,границыИнтервала).
Если же надо найти локальный минимум,
то исследуемую функцию берут с другим
знаком и ищут ее минимум, который
фактически является ее максимумом. При
этом значение функции в максимуме это
найденное значение с другим знаком.


Поиск
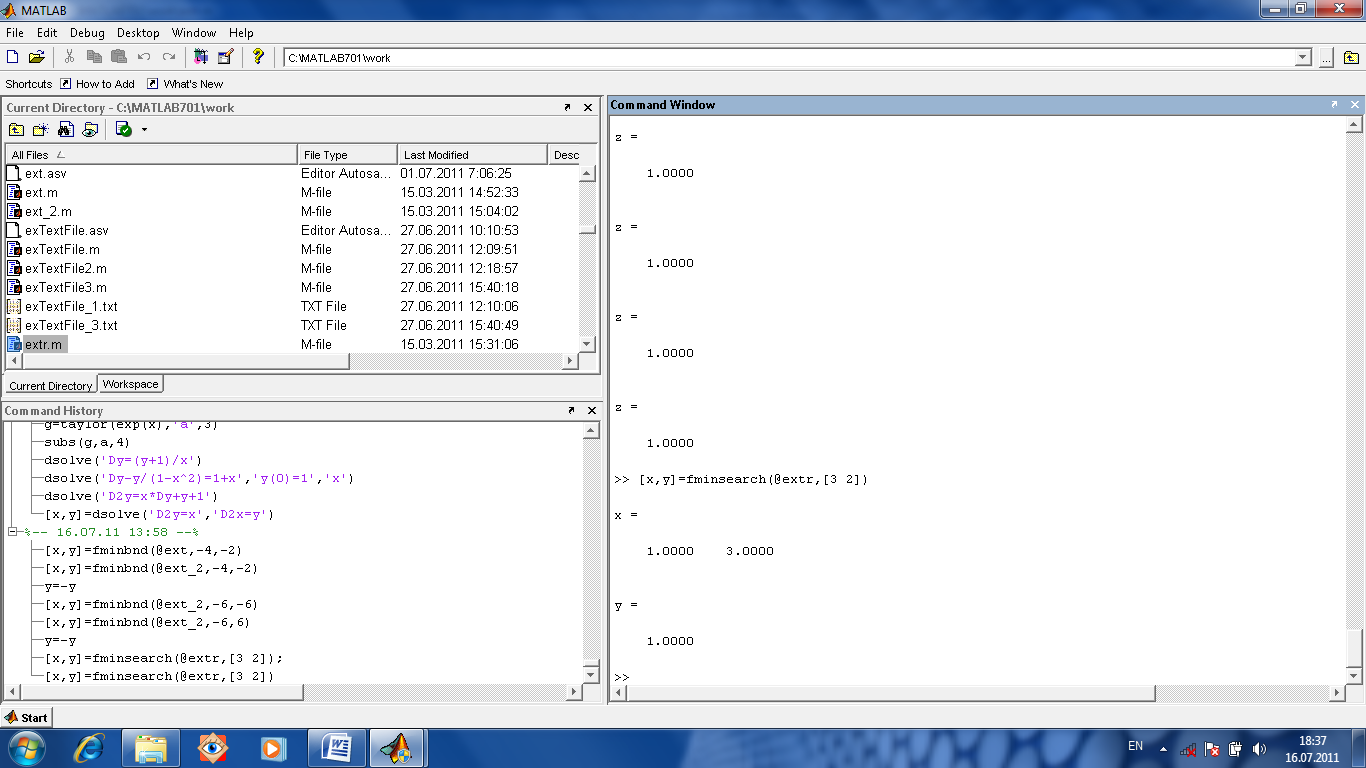
экстремума функции нескольких переменных.
Если функция вычисляется от нескольких
переменных, то для поиска ее минимума
используется (после приблизительной
оценки начальных приближений переменных
в предполагаемом минимуме) команда
[x,y]=fminsearch(имяФункции,
векторНачальныхПриближенийПеременных).

Решение задач линейного программирования. В задачах линейного программирования требуется найти максимум или минимум линейной функции многих переменных при линейных ограничениях в виде равенств или неравенств. Рассмотрим для примера такую задачу.
Пусть функция L(x1,x2,x3,x4)=x1+x2+x3+x4 и надо найти ее максимум и соответствующие ее максимуму значения переменных.
Пусть даны ограничения в виде неравенств. x1≥0, x2≥0, x3≥0, x4≥0.
Пусть также даны еще ограничения в виде неравенств.
3x1-x2≤7, x2-2x3≤-1, 4x3-x4≤3, 5x1+2x4≥14.
Для решения задачи линейного программирования (нахождения минимума) используется функция [x, L, f]=linprog(c, A, b, A1, b1,Lx, Rx) где
x вектор значений переменных, полученный в качестве ответа; L значение функции в минимуме;
f параметр, характеризующий вычислительный процесс (если он ноль то решение приостановлено после достижения максимального числа итераций, если положителен то все нормально решено, если отрицателен то решения не найдено);
c
функция цели представленная в виде
вектора коэффициентов (в нашем случае
[1 1 1 -1] но так как нам нужен максимум, а
функция [x,
L,
f]=linprog(c,
A,
b,
A1,
b1,
Lx,
Rx)
ищет минимум, то в выражении для функции
поменяем знак, поэтому вектор коэффициентов
будет [-1 -1 -1 1]); 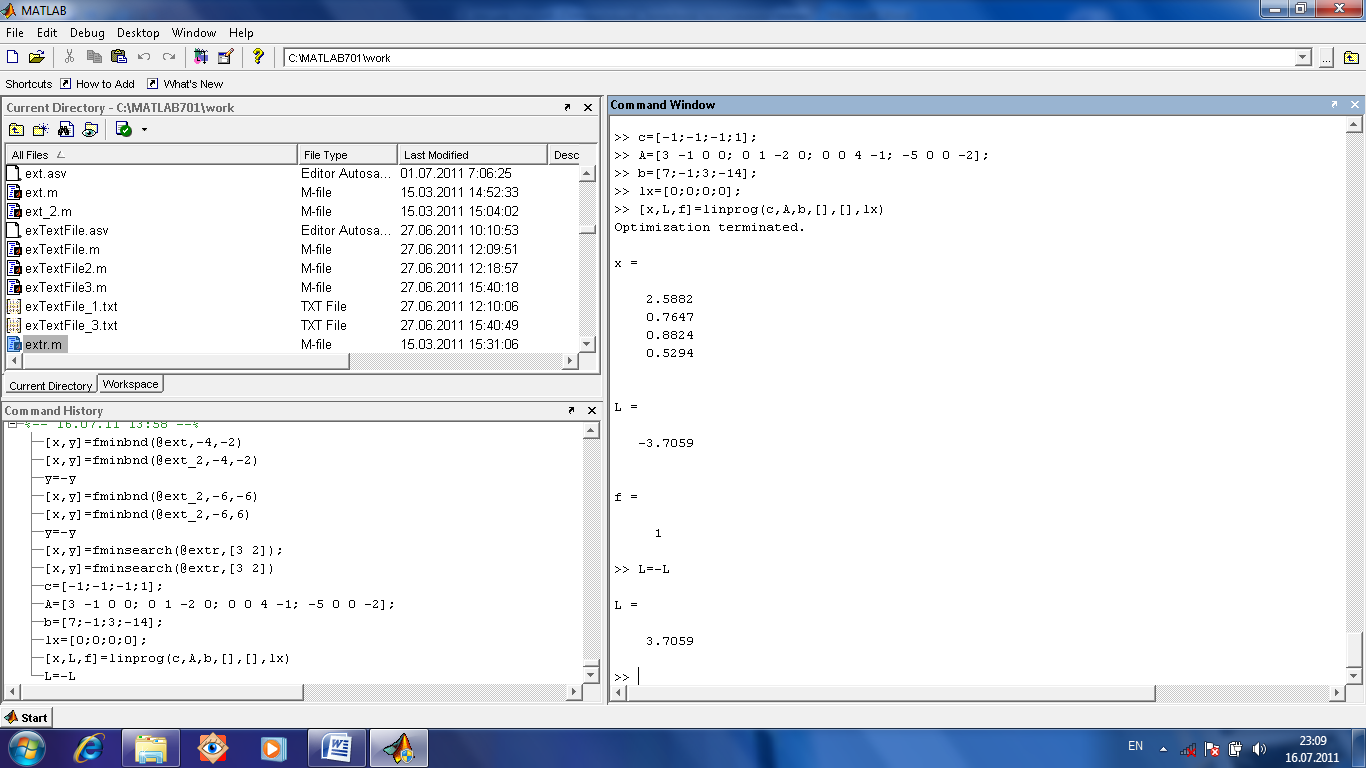
A,
b
система ограничений, заданная в матричном
виде Ax≤b
(это в нашей задаче ограничения 3x1-x2≤7,
x2-2x3≤-1,
4x3-x4≤3,
5x1+2x4≥14,
но так как 5x1+2x4≥14
не подходит, то надо поменять знак в
этом неравенстве и тогда оно будет
-5x1-2x4≤-14,
в таком случае матрица А состоит из
коэффициентов (при переменных) в этих
неравенствах, а столбец b
состоит из правых (не содержащих
переменных) частей неравенств; 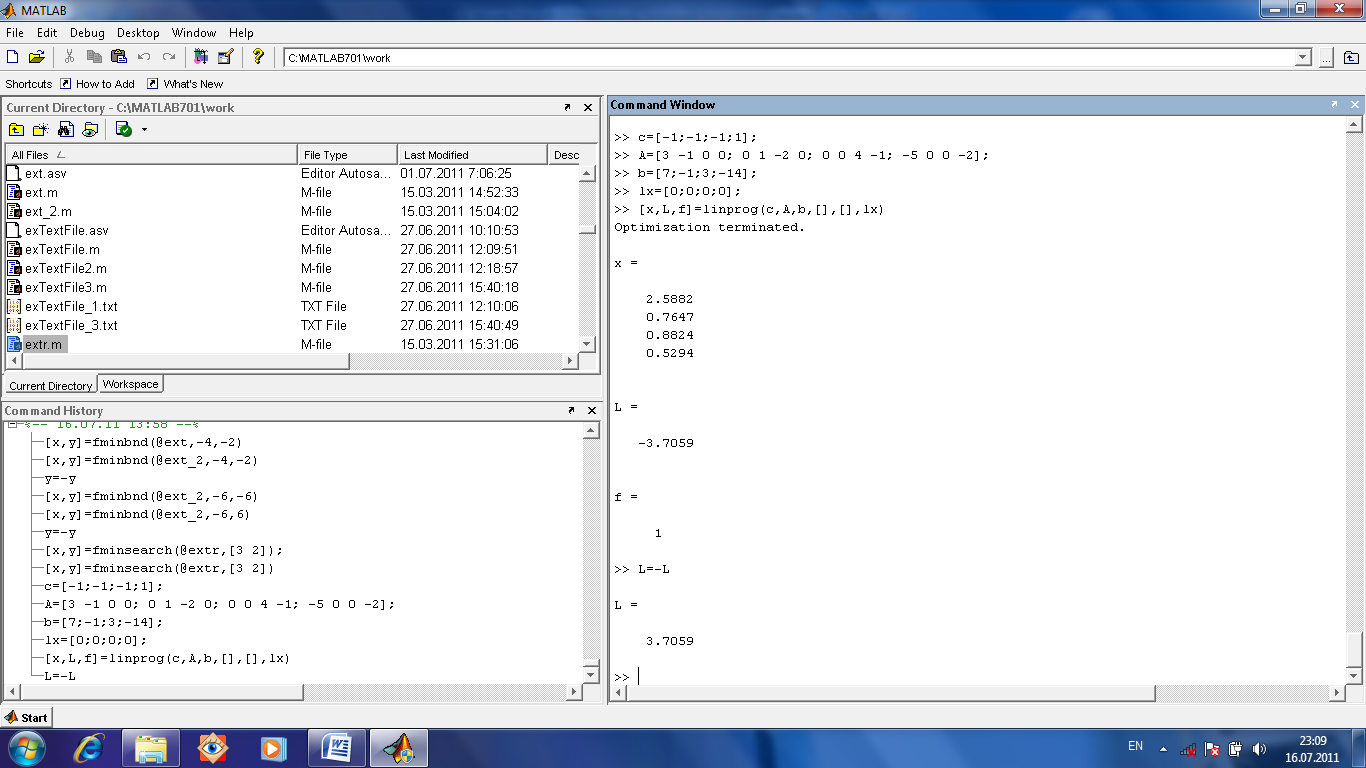
A1, b1 система равенств вида A1x=b (в нашей задаче такой системы ограничений нету, но могла бы быть);
Lx, Rx относятся к ограничениям в виде Lx≤x≤Rx, Lx≤x, x≤Rx (в нашей задаче есть ограничения вида Lx≤x, поэтому вектор Lx будет 0 0 0 0).
При использовании функции linprog в списке аргументов вместо тех, которые не указаны, ставятся пустые квадратные скобки.
Рассмотрим
еще пример для тренировки. Пусть дана
функция W=x1+x2+3x3-x4
и надо найти ее максимум. Пусть даны
ограничения в виде неравенств. 

x1-5x2+4x3≤5, x1-2x2-3x3≤4, x1+6x2+5x3≤4, x2+x3≤1. И пусть есть еще ограничения в виде неравенств. x1≥0, x2≥0, x3≥0, x4≥0.
Решим задачу с помощью функции [x, L, f]=linprog(c, A, b, A1, b1, Lx, Rx). Для ее применения нам надо подготовить аргументы функции. Вектор с коэффициентов функции равен (1 1 3 -1), но так как функция linprog ищет минимум, а нам нужен максимум, то поменяем знак у коэффициентов функции и тогда вектор с будет (-1 -1 -3 1). Матрица А состоит из коэффициентов при переменных в системе неравенств x1-5x2+4x3≤5, x1-2x2-3x3≤4, x1+6x2+5x3≤4, x2+x3≤1. Так как все они со знаком ≤ то ничего менять не требуется. Вектор b состоит из правых частей этих же неравенств. Матрица A1 из системы A1х=b1 для нас не актуальна (нет таких условий). Lx, Rx относятся к ограничениям в виде Lx≤x≤Rx, Lx≤x, x≤Rx. У нас есть ограничения в виде неравенств. x1≥0, x2≥0, x3≥0, x4≥0. Тогда вектор Lx=[0; 0; 0; 0]. Что касается остальных типов ограничений, то так как у нас нет таких ограничений, то для нас они не важны.
Задачи
нелинейного программирования.
Нелинейная задача отличается от линейной.
В ней есть система линейных неравенств
Ax≤b,
система линейных равенств A1x=b1,
система ограничений вида lx≤x≤rx,
lx≤x,
x≤rx.
Однако помимо этих уже знакомых (из
линейного программирования) условий,
есть еще система нелинейных ограничений
вида g1(x)≤0,
и система нелинейных равенств g2(x)=0.
Для решения задачи нелинейного
программирования (после выбора вектора
начальных приближений х0) используется
функция [x,
y,
f]=fmincon(F,
x0,
A,
b,
A1,
b1,
Lx,
Rx,
G),
где G
это М-функция, вычисляющая левые части
нелинейных ограничений g1(x)≤0,
g2(x)=0.
Если какие-то аргументы не определены,
то вместо них в вызове функции ставятся
квадратные скобки.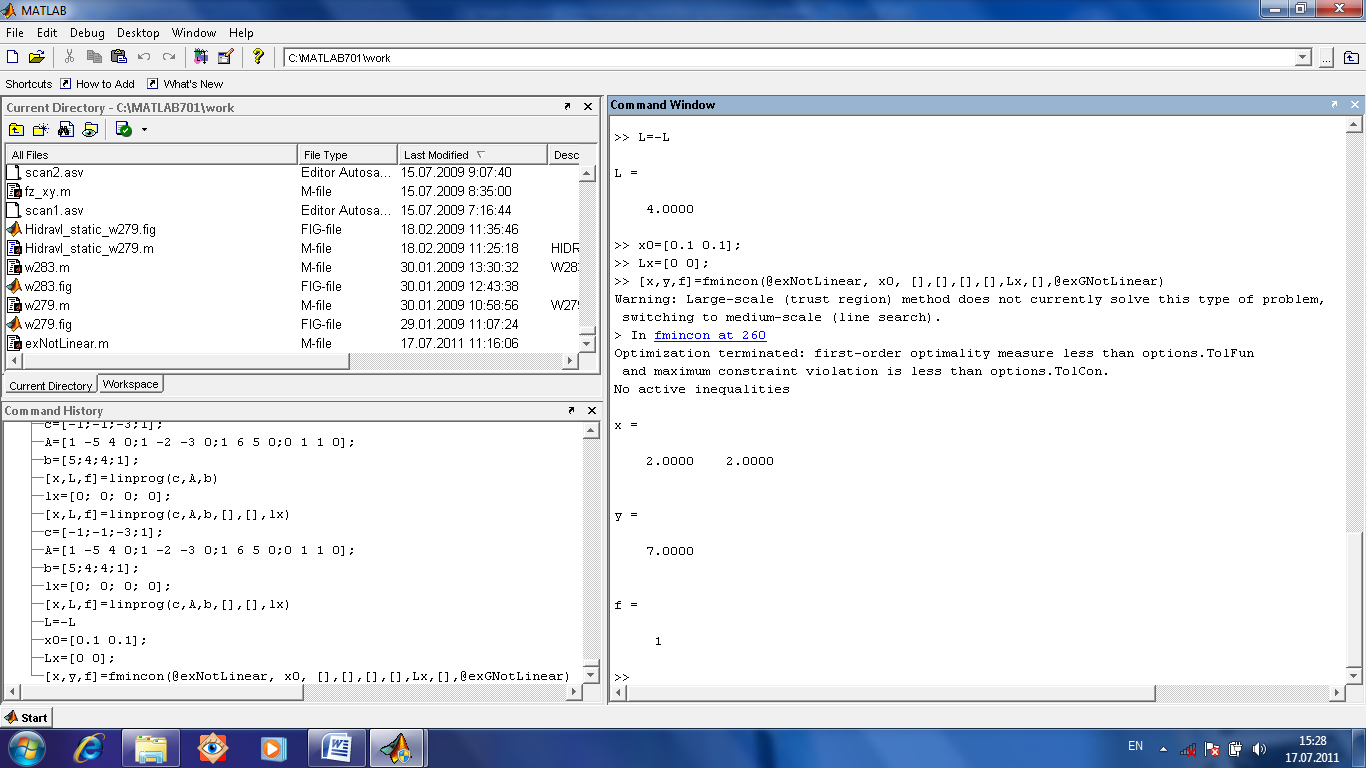

Рассмотрим для примера следующую задачу. пусть дана функция x12+x22=1 при условии, что x1x2=4, x1≥0, x2≥0. Вектор начальных приближений примем равным х0=(0.1, 0.1).