

Лекция 1.
Назначение и классификация радиотехнических систем (РТС). Содержание курса.
План лекции:
-Ознакомление с содержанием курса.
-Краткое описание предлагаемых модулей.
-Структура практических занятий.
-Система оценки знаний.
-Виды РТС, диапазоны частот.
Введение
По мере развития человеческого общества возникают все большие требования к быстрому обмену информацией, ее извлечению, обработке и накоплению. Рост объема производства сопровождается увеличением номенклатуры изделий, углублением специализаций и т. п. При этом потребность в обмене информацией растет пропорционально квадрату коэффициента расширения производства. Необходимость обмена информацией в хозяйственной сфере возрастает ежегодно примерно на 10... 15 %. Управление хозяйственной деятельностью в масштабах предприятий, объединений и отраслей, а также государства в целом также невозможно без обмена информацией.
С развитием транспорта, особенно воздушного и морского, возникает необходимость более интенсивного обмена информацией о погоде, заявках, получении сведений о местоположении и движении самолетов и кораблей. Повышение благосостояния и культурного уровня человечества привело к тому, что потребность в обмене информацией между людьми возрастает быстрее, чем увеличивается численность населения. Решение задачи обеспечения информационных потребностей общества возлагается на системы и аппаратуру передачи, извлечения, обработки и накопления информации. Грандиозные успехи в развитии общества были бы
2
немыслимы без этих технических средств, к которым, в первую очередь, относятся различные радиотехнические системы (РТС).
Радиосвязь снабжает информацией все области хозяйственной деятельности человека и личные потребности людей. Радиовещание и телевидение обеспечивают доставку последних известий, культурный досуг, образование и многое другое вне зависимости от расстояний. Радиолокация и радионавигация используются почти во всех видах транспорта. Без РТС не было бы современных авиации и морского флота. Радиотехнические системы применяются в различных научных исследованиях, медицине, метрологии, геологии, физике. В настоящее время ни одна экспериментальная наука не обходится без сложных и уникальных радиоэлектронных установок при проведении физических и медико-биологических исследований. Широкое распространение получили РТС исследования космического пространства. Трудно назвать область человеческой деятельности, которая не была бы связана с радиоэлектроникой. Без радиоэлектроники прогресс общества был бы невозможен.
Радиотехническими системами (РТС) называют системы передачи или извлечения информации с помощью радиосигналов. Радиосигналы - это электромагнитные колебания с частотами в диапазоне 10 кГц ÷ 30 ГГц. Нижняя частота указанного диапазона использовалась в радионавигационной сисетме "Омега", верхняя используется в радиолокационных станциях (РЛС) малой дальности действия.
Чаще всего РТС используют в радиосвязи, радиолокации, радионавигации и радиоуправлении беспилотными объектами. В последние годы преподавателсями МИЭТ И.М. Тепляковым и В.А. Галкиным изданы пособия по широкому кругу вопросов построения, функционирования, характеристик систем радиосвязи. Поэтому указанные системы в данном пособии не рассматриваются.
Предлагаемое пособие состоит из пяти разделов. В первом разделе излагаются сведения о методике расчета дальности действия радиосистем. С целью придания общности этому материалу все радиосистемы подразделяются на три группы, каждая из которых включает ряд различных по назначению систем.
Второй раздел посвящен радиолокационным устройствам и системам. Здесь рассмотрены физические принципы, лежащие в основе радиолокации, и блок-схема радиолокационной станции. Также определены параметры сигналов, от которых зависит
3
разрешающая способность РЛС по дальности, угловым координатам и скорости цели. Приводится подробный анализ методики обнаружения когерентной и некорентной пачек радиоимпульсов и расчета требуемого отношения сигнал/шум для обнаружения сигнала с заданными статистическими характеристиками. Рассмотрены разновидности РЛС, работающие с когерентным и некогерентным сигналом, а также методы обеспечения помехозациценности РЛС в отношении пассивных и активных помех.
Втретьем разделе рассмотрен принцип функционирования радиолокаторов с синтезированной апертурой (РСА), предназначенных для обследования поверхности Земли или другой планеты.
Четвертый раздел посвящен радионавигационным системам (РНС). Приведены краткие сведения о неавтономных РНС, разработанных в середине прошлого столетия. Подробнее рассмотрены автономные РНС, в которых вся аппаратура находится у потребителя навигационной информации. Достаточное внимание уделено современным спутниковым РНС (на примере американской системы GPS и отечественной глобальной спутниковой навигационной системы ГЛОНАСС).
Впятом разделе приведены краткие сведения о методах и аппаратуре систем радиоуправления беспилотными объектами на примере систем наведения снарядов. Рассмотрены принципы работы и характеристики систем наведения по радиолучу, систем командного управления и самонаведения. Приведены структурные схемы радиотехнических устройств, обеспечивающих работу указанных систем.
Материал курса разбит на 5 модулей, объединенных общей тематикой. Весь курс рассчитан на 108 часов. Из них 50 часов – аудиторные занятия, 22 часа отводится на самостоятельную работу и 36 часов на экзамен и подготовку к нему. В течение всего семестра студенты выполняют практические занятия, в ходе которых каждый студент на каждом из занятий получает оценки за выполнение заданий в ходе занятия. В процессе обучения на основе контроля текущей успеваемости и учета систематичности работы (посещаемости занятий и своевременности выполнения заданий) формируется интегральная оценка уровня подготовленности студента по данному предмету – рейтинг. Для допуска к сдаче экзамена по предмету студент должен отработать все контрольные мероприятия и иметь рейтинг выше неудовлетворительно.
4
При подготовке к практическому занятию необходимо прежде всего изучить методическую разработку по данному занятию, лекционный материал, рекомендованную основную и дополнительную литературу. В обязательном порядке следует разобрать приведенные примеры решения типовых задач и решить предлагаемые задачи.
Практические занятия по курсу «Радиотехнические системы» предназначены для закрепления знаний, полученных студентами на лекционных занятиях, охватывают весь лекционный курс и проводятся в компьютерном классе с использованием пакте прикладных программ Matlab. Предлагаются к отработке 5 практических занятий, каждое из которых включает один из функционально законченных разделов курса и состоит из типовых задач, характерных для изучаемого раздела.
Классификация РТС
Классификация радиотехнических систем по назначению. Классифицировать РТС можно по различным признакам. Основное назначение РТС состоит в предоставлении информации потребителю, поэтому в качестве основного признака при их классификации обычно используют содержание информации или назначение системы. Исходя из этого можно указать следующие основные типы систем: передачи информации (СПИ), извлечения информации, радиоуправления, разрушения информации и комбинированные системы.
Системы передачи информации. Характерной особенностью таких систем является наличие отправителя и получателя информации. На стороне отправителя сообщения преобразуются в радиосигналы, которые затем передаются по линии связи к получателю информации, где из принятых сигналов выделяется сообщение.
Радиотехнические системы извлечения информации. Характерной особенностью систем рассматриваемого класса является то, что полезная информация отображается в радиосигнале либо в процессе его распространения и отражения радиоволн, либо при не зависимом от рассматриваемой системы формировании и излучении радиоволн (естественных излучениях объектов, излучениях радиосредств противника и т. п.).
К системам извлечения информации относятся:
—радиолокационные системы (РЛС), за исключением РЛС с активным ответом;
—радионавигационные системы (РНС);
—системы дистанционного зондирования окружающей среды;
5
— системы разведки радиотехнических средств противника и др.
Системы разрушения информации. Системы этого класса предназначены для противодействия радиотехническим средствам противника. Они создают помехи нормальной работе подавляемой системы излучением мешающего сигнала.
Комбинированные системы. К этим системам относятся, например, РЛС с активным ответом. Они выполняют функции извлечения и передачи информации.
Рассмотренная классификация РТС не является строгой. Реальные системы могут сочетать функции систем различных классов. Так, в систему радиоуправления входят системы извлечения информации (радиолокационные и радионавигационные) и передачи информации (радиотелеметрии, передачи команд и др.).
Классификация РТС по дальности действия. По схеме расчета дальности действия радиотехнические системы удобно разделить на три группы:
-системы с односторонним распространением сигналов (линии радиосвязи, пассивные РЛС, некоторые радионавигационные системы);
-системы с двусторонним распространением сигналов (активные и полуактивные РЛС, в том числе РЛС, используемые в радионавигации);
-радиосистемы с ретрансляторами.
Во всех случаях дальность действия определяется как расстояние источника сигнала до места расположения средств системы, при котором система удовлетворяет предъявленным к ней требованиям. Для радиолокационных систем это может быть выполнение требований в отношении вероятностей правильного обнаружения и ложной тревоги (или точности измерения координат целей). Для систем цифровой радиосвязи - не превышение допустимой ошибки на бит информации.
Упомянутые параметры радиосистем тесно связаны с отношением сигнал/помеха на входе приемного устройства. Поэтому выражение дальности действия системы включает это отношение.
Расчеты дальности действия радиосистем RМАХ будем проводить в такой последовательности. Вначале определим методику расчета потенциальной дальности действия, т.е. дальности в свободном пространстве и при наличии единственной помехи в виде теплового шума приемника.
6
В дальнейшем мы рассмотрим влияние на величину RМАХ таких явлений, как затухание радиоволн в атмосфере, их отражение от земной поверхности и ограничение дальности действия прямой видимостью. Во второй главе будут рассмотрены естественные и организованные помехи радиолокационным станциям и методы помехозащиты.
Задание на самостоятельную проработку
Ознакомится с рекомендуемой литературой и конспектом данной и следующей лекции. Составить краткий письменный конспект с выделением наиболее трудновоспринимаемых самим студентом вопросов для разбора в ходе следующего лекционного, а также практического занятия. При этом в ходе подготовки к лекциям в рамках коллектива группы с использованием рекомендуемой литературы необходимо коллективно разобрать имеющиеся непонятные вопросы и составить общий список вопросов от групп для разбора материала с помощью преподавателя на лекции. Подготовленный список вопросов оформить в печатном виде и предоставить преподавателю перед лекцией.
Описание активных и интерактивных методов обучения.
Освоение данного лекционного материала предполагает активное творческое участие студентов в выделении по описанной выше методике вопросов, которые необходимо особенно глубоко разобрать в ходе диалога с преподавателем на лекции.
Литература
1.Незлин Д.В. Радиотехнические системы: Уч. пособие. - М.:МИЭТ, 2007. - 250 с.: ил. – С.2-4
2.Тепляков И.М. Основы построениея телекоммуникационных систем и сетей. М.,
МИЭТ, 2003. – С.2-3
3.Галкин В.А. Цифровая мобильная радиосвязь. Горячая линия - телеком, 2007. –
С.3-5
7
4.“Известия высших учебных заведений. Электроника” http://www.mocnit.miee.ru/redaction/.
5.http://ru.wikipedia.org/
Лекция 2.
Расчет дальности действия РТС с односторонним, двусторонним распространением радиоволн и РТС с ретрансляторами.
План лекции:
-Формулы для расчета дальности действия РТС с односторонним распространением сигналов;
-Описание и схемы активных, полуактивных РЛС и РЛС с активным ответом;
-Расчет дальности действия активных и полуактивных РЛС в свободном пространстве;
-Дальность действия активной радиолокационной системы с активным
ответом;
-Дальность действия пассивного радиолокатора.
Классификация РТС по расчету дальности действия
По схеме расчета дальности действия радиотехнические системы удобно разделить на три группы:
-системы с односторонним распространением сигналов (линии радиосвязи, пассивные РЛС, некоторые радионавигационные системы);
-системы с двусторонним распространением сигналов (активные и полуактивные РЛС, в том числе РЛС, используемые в радионавигации);
-радиосистемы с ретрансляторами.
Во всех случаях дальность действия определяется как расстояние от источника сигнала до места расположения средств системы, при котором система удовлетворяет предъявленным к ней требованиям. Для радиолокационных систем это может быть выполнение требований в отношении вероятностей правильного обнаружения и ложной тревоги (или точности измерения координат целей). Для систем цифровой радиосвязи - не превышение допустимой ошибки на бит информации.
Упомянутые параметры радиосистем тесно связаны с отношением сигнал/помеха на входе приемного устройства. Поэтому выражение дальности действия системы включает это отношение.

2
Расчеты дальности действия радиосистем RМАХ будем проводить в такой последовательности. Вначале определим методику расчета потенциальной дальности действия, т.е. дальности в свободном пространстве и при наличии единственной помехи
ввиде теплового шума приемника.
Вдальнейшем мы рассмотрим влияние на величину Rmax таких явлений, как
ρ = |
Pc |
= |
PпGALa B |
|
= |
PпGALa ∆fctc |
|
|
||||
|
P |
|
4πR2 N |
ш |
kT°∆f |
пр |
|
4πR2 N |
ш |
kT°∆f |
пр . |
|
|
ш |
|
|
|
|
|
|
|||||
Приравнивая ρ требуемому значению ρтр, найдем дальность действия Rmax
3
Rmax = |
|
PпGALa ∆fctc |
|
|
|
4πρтр NшkT°∆fпр . |
|||||
|
|
||||
В подобные выражения ρтр нужно подставлять не в децибелах, а в относительных единицах. Полагаем, что приемник согласован с сигналом, т.е. ƒпр = ƒс. Тогда
Rmax = |
|
PпGALa tc |
|
|
|
|
4πρтр NшkT° |
. |
(1.1) |
||||
|
|
|||||
|
|
|
||||
Дальность действия систем с двусторонним распространением сигналов
К данному типу радиосистем относятся радиолокационные станции (активные и полуактивные) и системы с ретрансляторами (активные радиолокаторы с активным ответом и некоторые системы радиосвязи).
Упрощенная блок-схема активной радиолокационной станции (РЛС) представлена на рис.1.1. Характерной ее особенностью является расположение передатчика и приемника в одном месте.
РЛС |
Цель |
Передатчик |
АП |
Приемник |
R |
Рис.1.1.Упрощенная блок-схема активной РЛС. АП - антенный переключатель.
Блок - схема полуактивной радиолокационной системы приведена на рис.1.2. В данной системе передатчик и приемник, как правило, разнесены на большое расстояние. Примером подобной системы является полуактивная система самонаведения снарядов.
R1
Передатчик |
Цель |
R2
Приемник
Рис. 1.2. Полуактивная РЛС.
4
Для наведения на цель в головной части снаряда устанавливается приемник с антенной и устройством выработки команд управления. Мощный передатчик, облучающий цель (передатчик подсвета цели), находится в месте расположения пусковой установки (на земной поверхности, на корабле, на самолете). Отраженный целью сигнал принимается на снаряде. По этому сигналу осуществляется наведение снаряда
Приведенным примером можно воспользоваться и для иллюстрации работы пассивных радиолокаторов. Если на цели находится работающее радиооборудование, снаряд с головкой самонаведения может наводиться по радиосигналу, излучаемому целью. При этом передатчик подсвета не требуется.
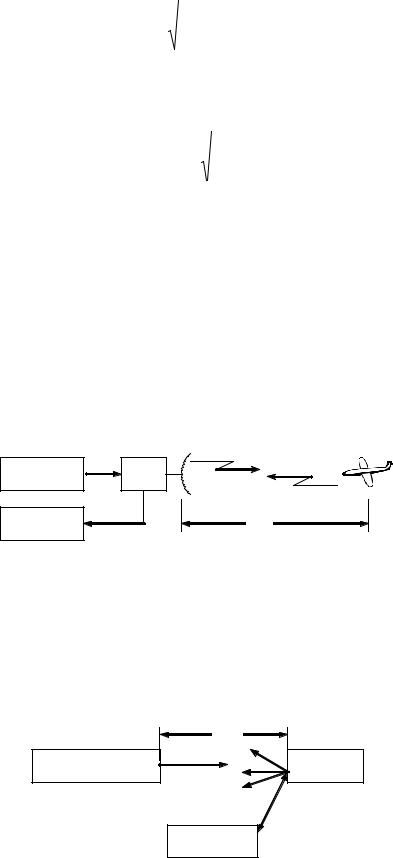
Последний тип радиолокаторов называется активным радиолокатором с активным ответом (рис.1.3).
РЛС |
|
Самолет |
Передатчик |
АП |
Ответчик |
Приемник 
Рис.1.3. Блок-схема РЛС с активным ответом. АП - антенный переключатель.
Примером подобных систем является радиолокационная система управления движением самолетов в окрестности аэропорта. Наличие ответчика (ретранслятора зондирующего сигнала) на борту самолета позволяет не только увеличить дальность действия наземного радиолокатора, но и идентифицировать конкретный самолет по кодированному ответному сигналу.
В дальнейшем мы рассмотрим методику расчета дальности действия упомянутых типов радиолокационных систем.
Дальность действия активных и полуактивных радиолокационных систем в свободном пространстве.
Начнем с полуактивной системы.
Плотность потока мощности зондирующего сигнала в месте нахождения цели
равна

5
П1 = 4PпG2 .
πR1
Здесь Pп и G - мощность передатчика и коэффициент усиления передающей антенны. Мощность отраженного сигнала в направлении на приемник пропорциональна величине П1 . Коэффициент пропорциональности σ, имеющий размерность площади, называют эффективной площадью рассеяния (ЭПР) цели. Следовательно, плотность потока мощности отраженного сигнала в месте расположения приемника равна
П |
2 |
= |
|
σ П1 |
= |
|
Pп G σ |
|
(1.2) |
|
|
4πR2 |
16π 2 R2 |
R2 |
|||||||
|
|
|
|
|
||||||
|
|
|
2 |
|
1 |
|
2 |
|
||
Мощность отраженного сигнала на выходе приемной антенны равна
P = П |
|
A = |
Pп G A σ |
|
(1.3) |
|
|
16π 2 R2 |
R |
|
|||
с |
2 |
|
2 |
|
||
|
|
|
1 |
|
2 |
|
Здесь A - эффективный раскрыв приемной антенны. В (1.3) нужно внести безразмерный коэффициент аппаратурных потерь La <1. Тогда (1.3) перейдет в выражение
P |
= |
Pп G A σ La |
(1.4) |
||
16π 2 R2 |
R2 |
|
|||
с |
|
|
|
||
|
|
1 |
2 |
|
|
Кстати, приведем соотношение между коэффициентом усиления антенны и ее |
|||||
эффективным раскрывом |
|
|
|
|
|
|
|
G = |
4πA |
, |
|
|
|
λ2 |
|
||
|
|
|
|
|
|
где λ - длина волны.
Учтем результаты, полученные в разделе 1.2, в том числе предположение об использовании сигналов с произвольным значением базы
B = tc ∆fc .
Тогда получим выражение для максимального значения произведения R1 R2 в
виде
(R |
R |
2 |
) |
max |
= |
|
Pп G A tc σ La |
|
. |
(1.5) |
|
||||||||||
1 |
|
|
|
16π 2 ρтр Nш k T ° |
|
|||||
|
|
|
|
|
|
|
||||

6
Величина ρтр определяется заданным качеством обнаружения цели (заданными вероятностями правильного обнаружения и ложной тревоги). Методика расчета ρтр рассматривается ниже.
Для импульсных РЛС величина tc равна длительности импульса передатчика.
Для активного радиолокатора R2 |
= R1 = R . При этом формула (1.5) переходит в |
||||||
выражение для дальности действия этого типа аппаратуры |
|
||||||
|
|
|
|
|
|||
Rmax = 4 |
|
Pп G A tc σ La |
|
(1. 6) |
|||
16π 2 |
ρтр Nш k T ° |
||||||
|
|
||||||
Заметим, что при выводе формул (1.5) и (1.6) предполагалось, что цель находится на направлении максимального излучения передающей антенны и направлении максимального приема приемной антенны.
В формулах (1.5) и (1.6) мощность передатчика следует подставлять в Ваттах, эффективный раскрыв антенны и ЭПР цели в квадратных метрах, G , La, ρr - в относительных единицах, "k" - в Джоуляхградус , T c - в градусах Кельвина, ∆f - в Герцах.
Тогда R1 , R2 , R будут выражаться в метрах. Величину
E = Pп tc G A La ,
ρтр Nш
которая в значительной степени определяет дальность действия радиолокатора, иногда называют энергетическим потенциалом РЛС.
Дальность действия активной радиолокационной системы с активным ответом.
Для заданной дальности действия системы Rmax существуют два уравнения
|
Rmax = R1 , |
(1.7) |
где |
R1 - максимальная дальность, при которой |
ретранслятор обнаруживает |
зондирующий сигнал; |
|
|
R2 |
- максимальная дальность, на которой радиолокатор обнаруживает ответный |
|
сигнал. Примем худшие случаи Rmax = R1 ; Rmax = R2 . |
|
|

7
Дальности R1 и R2 рассчитываются по методике, аналогичной той, которая была использована при выводе формул (1.5) и (1.6). Поэтому приведем выражения Rmax без
доказательства. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Rmax |
= |
|
|
|
|
P1 |
G1 A2 L1.2 |
|
|
(1.8) |
|
|
|
4π |
ρ2 k Ts2 ∆f |
2 |
|
||||||
|
|
|
|
|
|
|
|||||
Rmax |
|
= |
|
|
|
P2 G2 A1 L2.1 |
|
|
(1.9) |
||
|
|
|
|
4π |
ρ1 k Ts1 ∆f |
|
|||||
|
|
|
|
|
|
1 |
|
|
|||
Параметры радиолокатора в правых частях (1.8) и (1.9) снабжены индексом "1", а |
|||||||||||
параметры ретранслятора - индексом |
"2". Коэффициент L1.2 представляет собой |
||||||||||
произведение коэффициентов потерь передающей части радиолокатора и приемной части ретранслятора. Коэффициент L2.1 - это произведение коэффициентов потерь передающей части ретранслятора и приемной части радиолокатора. Энергетические параметры радиолокатора и ретранслятора рассчитываются по формулам (1.8) и (1.9) при заданном значении Rmax .
Расчетные формулы (1.8) - (1.9), полученные в этом разделе, можно использовать при расчетах других систем с ретрансляторами.
Дальность действия пассивного радиолокатора.
Дальность действия пассивного радиолокатора можно рассчитать по формуле (1.9), если полоса пропускания приемника не меньше ширины спектра сигнала, излучаемого аппаратурой на цели. В противном случае числитель подкоренного выражения в (1.9) нужно умножить на отношение полосы пропускания приемника радиолокатора к ширине спектра сигнала, излучаемого целью. Теперь в (1.9) Rmax - это дальность действия РЛС, параметры радиолокатора имеют индекс "1", а параметры аппаратуры на цели - индекс "2". Коэффициент потерь в приемной части радиолокатора равен
8
Задание на самостоятельную проработку
Ознакомится с рекомендуемой литературой и конспектом данной и следующей лекции. Составить краткий письменный конспект с выделением наиболее трудновоспринимаемых самим студентом вопросов для разбора в ходе следующего лекционного, а также практического занятия. При этом в ходе подготовки к лекциям в рамках коллектива группы с использованием рекомендуемой литературы необходимо коллективно разобрать имеющиеся непонятные вопросы и составить общий список вопросов от групп для разбора материала с помощью преподавателя на лекции. Подготовленный список вопросов оформить в печатном виде и предоставить преподавателю перед лекцией.
Описание активных и интерактивных методов обучения.
Освоение данного лекционного материала предполагает активное творческое участие студентов в выделении по описанной выше методике вопросов, которые необходимо особенно глубоко разобрать в ходе диалога с преподавателем на лекции.
Литература
1.Незлин Д.В. Радиотехнические системы: Уч. пособие. - М.:МИЭТ, 2007. - 250 с.:
ил. – С.4-10
2.Тепляков И.М. Основы построениея телекоммуникационных систем и сетей. М.,
МИЭТ, 2003. – С.10-15
3.Галкин В.А. Цифровая мобильная радиосвязь. Горячая линия - телеком, 2007. –
С.10-12
4.“Известия высших учебных заведений. Электроника” http://www.mocnit.miee.ru/redaction/.
5.http://ru.wikipedia.org/