

Литература / Razreshenie_2021_stud
.pdfРазрешение сигналов
Структурная схема импульсной РЛС
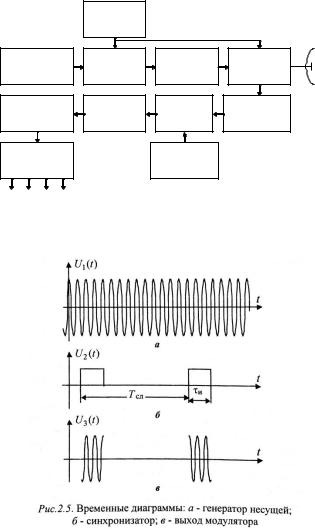
Блок-схема РЛС с импульсным зондирующим сигналом представлена на рис.2.4. Генератор несущей формирует гармоническое
напряжение со стабильной частотой f0 (рис.2.5,а). Синхронизатор генерирует последовательность импульсов длительностью и и с периодом Tсл (рис.2.5,б). Модулятор в данном случае представляет
собой электронный ключ, отпираемый импульсами синхронизатора. На выходе модулятора имеет место последовательность радиоимпульсов (рис.2.5,в). При наличии импульса на выходе синхронизатора антенный переключатель соединяет антенну с усилителем мощности (см. рис.2.4). При этом радиоимпульс зондирующего сигнала излучается в пространство. В интервале между импульсами синхронизатора антенна подключается к входу приемника. На вход приемника поступают импульсы отраженных от целей сигналов. После усиления в малошумящем усилителе (МШУ) отраженный сигнал поступает на смеситель. На выходе последнего формируется напряжение промежуточной частоты
fпр = f0 – fгет. (2.3)
Это напряжение усиливается и фильтруется. Затем оно поступает в устройство обработки сигналов. На выходе последнего формируется сигнализация обнаружения цели, а также выдаются значения текущих координат цели R, β, ε и ее радиальной скорости.
-1- / 2021
Синхронизатор
Генератор |
Модулятор |
Усилитель |
АП |
несущей |
|
мощности |
|
|
|
||
Фильтр |
Усилитель |
Смеситель |
МШУ |
|
|
||
Обработка |
|
Гетеродин |
|
сигналов |
|
|
|
R β ε V
Рис. 2.4. Блок - схема импульсной РЛС.
АП - антенный переключатель; МШУ - малошумящий усилитель
-2- / 2021

Выбор времени следования зондирующих импульсов
Для того чтобы дальность до цели измерялась однозначно и просто, нужно выбирать период следования импульсов передатчика из соотношения
Tсл 2Rmax , (2.4) c
где Rmax – дальность действия радиолокатора.
При нарушении условия (2.4) возникает неопределенность в измерении дальности цели, иллюстрируемая на рис.2.6, на котором показано расположение импульсов отраженного сигнала цели относительно импульсов передатчика. Рис.2.6,a относится к случаю,
когда T |
2Rmax |
, а рис.2.6,б – к случаю |
T |
2Rmax |
. На рис.2.6,б |
|
|
||||
сл |
c |
сл |
c |
||
|
|
||||
пунктиром изображен отраженный сигнал, обязанный импульсу передатчика, который предшествует первому зондирующему импульсу.
Из рис.2.6,б следует, что измеренная дальность цели равна R1 . Истинная дальность составляет R2 .
-3- / 2021

Разрешающая способность по дальности
Разрешающей способностью называют свойство радиолокатора раздельно обнаруживать близко расположенные цели и раздельно измерять их координаты и радиальные скорости. Вместе с тем термин "разрешающая способность" используется и как количественная характеристика степени разрешения по той или иной координате цели. В этом случае разрешающей способностью по какой-либо координате (дальности, азимуту, углу места) или радиальной скорости называют минимальную разность значений этой координаты (скорости) двух целей, при которой эти цели могут быть еще обнаружены раздельно. При этом, конечно, считается, что остальные координаты (скорость) целей одинаковы или во всяком случае по ним цели не разрешаются.
В данном разделе кратко рассмотрим факторы, определяющие разрешающую способность радиолокатора по дальности, угловым координатам и радиальной скорости.
Разрешение по дальности. Оценим разрешающую способность по дальности на примере импульсного радиолокатора. Пусть имеются две цели на дальностях R1 и R2 (рис.2.7,а). Временной зазор между
импульсами отраженных сигналов на выходе устройства обработки (рис.2.7,б) равен
t |
2R2 |
|
2R1 |
t |
|
, (2.5) |
|
|
|
||||
|
c |
|
c |
с |
||
|
|
|
|
|||
где tс – |
длительность |
импульса отражённого сигнала на выходе |
||||
устройства обработки. При сближении целей, как следует из (2.5), промежуток t уменьшается.
Примем за разрешающую способность по дальности R такую разность дальностей целей R2 R1 , при которой t обращается в ноль и отраженные сигналы начинают сливаться. Тогда из (2.5) следует, что
t |
2 |
R2 R1 |
|
t |
|
; t |
2 R |
t |
, устремим t 0 |
2 R |
t |
|
|
|
|
с |
|
|
с |
||||||
|
|
c |
|
|
|
c |
с |
|
c |
|
||
|
|
|
|
|
|
|
|
|
|
R ct2с , (2.6)
-4- / 2021

Длительность импульса на выходе согласованного фильтра равна
t |
|
|
1 |
|
, где f |
|
– полоса пропускания согласованного фильтра. |
с |
f |
|
с |
||||
|
|
|
|
|
|||
|
|
|
с |
|
|
||
Следовательно, при использовании согласованного фильтра в устройстве обработки сигналов
R c (2.7)
2 fс
Откуда вытекает вывод, что разрешение по дальности определяется полосой сигнала.
Прямоугольные импульсы это до СФ, а треугольные после. Как на рис.1.19.
-5- / 2021

Существует понятие мёртвой зона РЛС. Это относится именно к импульсным РЛС. Пока излучается зондирующий импульс, приёмник закрыт и не может принимать отражённый сигнал. Т.е. цели находящиеся вокруг РЛС в мёртвой зоне не могут быть обнаружены. Мёртвая зона определяется длительностью зондирующего сигнала, т.е. временем пока приёмник закрыт. Переходя от временных соотношений к дальности, можно определить расстояние мёртвой зоны вокруг РЛС
Rmin c2и .
Разрешающая способность по угловым координатам
-6- / 2021

-7- / 2021

Угловая разрешающая способность равна ширине двусторонней диаграммы направленности антенной системы РЛС θ. Действительно, при угловом расстоянии между двумя объектами, равном θ, эти объекты не могут одновременно попасть в пределы луча антенны.
Рассмотрим суммирование напряжённости поля электромагнитной волны создаваемой излучателями антенной решётки АР. Вообще любую антенну с узким лучом можно рассматривать как АР при межэлементном расстоянии стремящемся к нулю.
E Eme j i |
|
F |
sin x |
– нормированная ДН по |
|
x |
|||||
i |
|
|
|
||
напряжённости поля; |
|
|
|
|
-8- / 2021

|
sin x |
2 |
|
F 2 |
– нормированная ДН по мощности |
||
x |
|||
|
|
||
|
|
|
|
|
|
sin x |
2 |
|
|
|
|
Из анализа этой функции при |
F 2 |
|
0,5 следует |
|||||
x |
||||||||
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
что: |
|
|
|
|
|
|
|
|
Односторонняя ДН 0,88 |
|
; УБЛ = –13,4 дБ. |
(ширина |
ДН |
||||
|
L |
|
|
|
|
|
|
|
выражена в радианах, если перевести в градусы 0,88 |
180 |
51 |
, то |
|||||
|
||||||||
|
|
|
|
|
|
|
||
получится известная вам формула) |
|
|
|
|
|
|
|
|
А так как в РЛС эффект проявляется 2 раза при излучении сигнала антенной и при приёме, то следует говорить о квадрате нормированной ДН по мощности. В основном уравнении РЛ присутствует произведение коэффициентов усиления приёмной и передающей антенн. Из анализа
|
sin x |
4 |
|
|
этой функции при F 4 |
|
0,5 следует что: |
||
x |
||||
|
|
|
||
|
|
|
|
Двусторонняя ДН 0, 64 L ; УБЛ = –26,8 дБ.
Поэтому в РЛ используется именно эта формула для определения разрешающей способности по угловым координатам.
Разрешающая способность по радиальной скорости целей.
Радиальная скорость цели выражается через доплеровское смещение частоты
VR fд .
2
Следовательно, разрешающая способность радиолокатора по скорости равна
VR 2 fд , (2.8)
-9- / 2021

где fд – разрешение по доплеровскому смещению частоты. Знак «–»
опущен т.к. для определения разрешающей способности значение имеет не знак, а модуль.
Величина fд обратна длительности когерентной пачки отражённого сигнала NTсл . Таким образом,
VR |
|
. (2.9) |
|
|
|||
2NTсл |
|||
|
|
В случае некогерентного сигнала fд обратна длительности одного импульса пачки и . Следовательно,
VR
2 и
Или иными словами можно сказать, что разрешающая способность по радиальной скорости (доплеровскому смещению частоты) определяется когерентной частью сигнала.
V |
|
|
; f |
|
|
1 |
R |
|
2tког |
|
д |
|
tког |
|
|
|
|
|
Если вспомнить спектр последовательности N радиоимпульсов длительностью импульсов и и периодом следования Tсл . Длительность всего сигнала будет NTсл
-10- / 2021